TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024055424
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162347
出願日
2022-10-07
発明の名称
移動体の運転支援装置及び自動運転システム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20240411BHJP(制御;調整)
要約
【課題】路面状況などの様々な要因を考慮した運転支援を可能とする移動体の運転支援装置及び自動運転システムを提供する。
【解決手段】移動体の運転支援装置は、移動体の位置を推定する制御装置を備え、制御部は、移動体が移動した経路情報を蓄積した実績経路データベースを有し、実績経路データベースに基づいて、移動体の運転支援を行う。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の位置を推定する制御装置を備え、
前記制御装置は、前記移動体が移動した経路情報を蓄積した実績経路データベースを有し、
前記実績経路データベースに基づいて前記移動体の運転支援を行う、
移動体の運転支援装置。
続きを表示(約 740 文字)
【請求項2】
所定の領域上を移動する移動体の運転を支援する運転支援装置であって、
前記制御装置は、
前記実績経路データベースに基づいて、前記領域上の各部の移動難易度を示したコストマップを作成し、
前記コストマップに基づいて前記移動体の運転支援を行う、
請求項1記載の移動体の運転支援装置。
【請求項3】
前記経路情報は、前記移動体の位置をロギングした走行ログデータである、
請求項1記載の移動体の運転支援装置。
【請求項4】
前記制御装置は、前記実績経路データベースの経路情報に含まれる経路上の移動難易度が低くなるように前記コストマップを作成する、
請求項2記載の移動体の運転支援装置。
【請求項5】
前記経路情報は、前記移動体の姿勢データを含み、
前記制御装置は、前記姿勢データに基づいて、前記移動体が移動した軌跡の幅を計算し、当該軌跡の幅が反映された前記コストマップを作成する、
請求項4記載の移動体の運転支援装置。
【請求項6】
移動体を移動させたときに前記経路情報を前記実績経路データベースに登録するか否かを切り替える操作部を、更に備える、
請求項1記載の移動体の運転支援装置。
【請求項7】
前記制御装置は、前記実績経路データベースに登録された経路情報に沿って前記移動体の運転支援を行う、
請求項1記載の移動体の運転支援装置。
【請求項8】
請求項7に記載の運転支援装置と、
前記運転支援装置の運転支援に応じて自動運転される前記移動体と、
を備える自動運転システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の運転支援装置及び自動運転システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
以前より、パスプランニングアルゴリズムを用いて移動体の最適な移動経路を生成することが行われている。また、特許文献1には、自律移動ロボットが走行する経路の探索プログラムが示されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-191502号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の移動経路の生成手法では、悪路を有する不整地等において路面状況を考慮して移動経路の生成を行うことは容易でない。
【0005】
本発明は、路面状況などの様々な要因を考慮した運転支援を可能とする移動体の運転支援装置及び自動運転システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る移動体の運転支援装置は、
移動体の位置を推定する制御装置を備え、
前記制御装置は、前記移動体が移動した経路情報を蓄積した実績経路データベースを有し、
前記実績経路データベースに基づいて前記移動体の運転支援を行う。
【0007】
本発明に係る自動運転システムは、
上記の運転支援装置と、
前記運転支援装置の運転支援に応じて自動運転される前記移動体と、
を備える。
【発明の効果】
【0008】
本発明によれば、例えば熟練者の運転など好適な運転によって移動体が移動したときの経路情報を、実績経路データベースに蓄積させることができる。当該経路情報は、好適な運転によって、路面状況など様々な要因を考慮した上で通過に適していると判断された良好な移動経路に相当する。そして、このような経路情報が蓄積された実績経路データベースに基づいてコストマップが作成されるので、路面状況など様々な要因を考慮して移動難易度が定められたコストマップを得ることができる。したがって、当該コストマップにより路面状況などの様々な要因を考慮した運転支援を実現できる。
【図面の簡単な説明】
【0009】
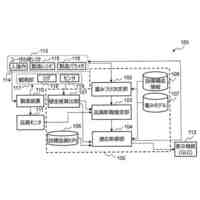
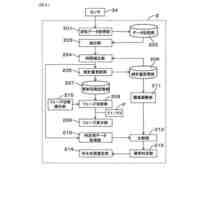
本発明の実施形態に係る移動体とその運転支援装置を示すブロック図である。
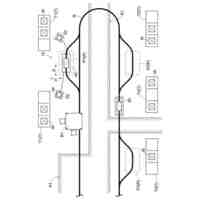
実績経路データベースに登録される移動経路の一例を示す図である。
実績経路データベースに登録される経路情報の一例を示す図である。
経路情報に含まれる姿勢データから得られる移動体の軌跡の幅を説明する図である。
コストマップの一例を示す図(A)、並びに、その一部の拡大図(B)である。
コストマップの作成方法を説明する図である。
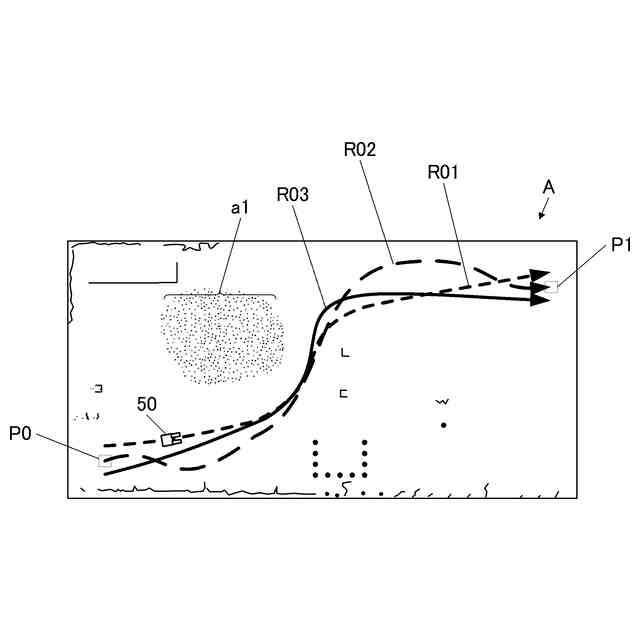
コストマップを用いて制御装置が生成した良好経路の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
3日前
アズビル株式会社
流量制御装置
1か月前
ミネベアミツミ株式会社
入力装置
28日前
株式会社エクセディ
作業ロボット
16日前
トヨタ自動車株式会社
自動走行搬送車
1か月前
オムロン株式会社
開発装置、開発方法
1日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
移動体制御装置
15日前
株式会社ダイフク
搬送設備
6日前
株式会社クボタ
故障診断装置
1か月前
株式会社ダイフク
物品搬送設備
3日前
岩田工機株式会社
加工装置
15日前
リックス株式会社
状態検出装置
1か月前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
過電流検出回路
2日前
村田機械株式会社
搬送車システム
21日前
株式会社GSユアサ
電力変換装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
9日前
日本精工株式会社
制御システムおよび制御方法
9日前
日本精工株式会社
制御システムおよび制御方法
9日前
日本精工株式会社
制御システムおよび制御方法
9日前
日本精工株式会社
制御システムおよび制御方法
9日前
東洋電装株式会社
移動検出装置および鞍乗車両
1か月前
株式会社デンソー
ペダル装置
1か月前
多摩川精機株式会社
突入電流防止回路
21日前
株式会社ダイフク
無人航空機の搬送システム
1か月前
シャープ株式会社
走行システム及び走行方法
1日前
株式会社ディスコ
加工装置
21日前
富士電機株式会社
予測装置、予測方法及びプログラム
今日
株式会社日立製作所
設備診断装置及び設備診断方法
28日前
シンフォニアテクノロジー株式会社
地図作成方法
3日前
清水建設株式会社
自律移動ロボット
28日前
株式会社ジェイテクト
異常判定装置
2日前
清水建設株式会社
自律移動ロボット
28日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ