TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024063552
公報種別
公開特許公報(A)
公開日
2024-05-13
出願番号
2022171601
出願日
2022-10-26
発明の名称
地図作成方法
出願人
シンフォニアテクノロジー株式会社
代理人
弁理士法人ネクスト
主分類
G05D
1/43 20240101AFI20240502BHJP(制御;調整)
要約
【課題】特定走路を走路に含む地図データを精度よく作成することができる地図作成方法を提供する。
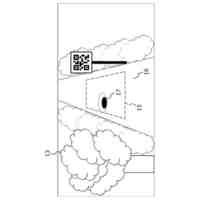
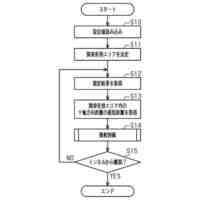
【解決手段】特定走路に、ランドマークになる配置物を配置し、自律走行ロボットに、走行中に、外界センサにより検出された配置物を含む物体の相対座標を取得させる。自律走行ロボットに、取得された配置物を含む物体の相対座標を、自己位置を用いた絶対座標への変換と、変換後の絶対座標を用いた自己位置の更新とを繰り返し実行させる。作成された配置物を含む物体の相対座標を、メモリに記憶して地図データの元となる元データを作成する。情報処理装置により、元データから配置物の情報を削除することで、地図データを作成する。
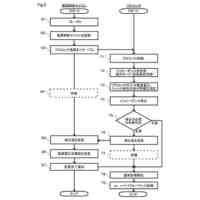
【選択図】図7
特許請求の範囲
【請求項1】
周囲の物体の相対距離を検出する外界センサと、
車輪を有する走行部と、
前記車輪の回転量に基づいて、移動量を計測する内界センサと、
制御部と、
を備える地図作成装置と、情報処理装置とにより、地図データを作成する地図作成方法であって、
前記制御部は、
前記走行部による走行中に、絶対座標である自己位置を推定する自己位置推定処理を実行可能な構成であり、前記自己位置推定処理では、前記内界センサにより計測された前記移動量に基づく自己位置の推定と、異なる自己位置での前記外界センサにより同一のランドマークを検出させることで得られた絶対座標に基づく自己位置の推定と、を併用することが可能であり、
地図データの作成対象に含まれる特定走路に、ランドマークになる配置物を配置する配置ステップと、
前記走行部による走行中に、前記制御部に、前記外界センサにより検出された前記配置物を含む物体の相対座標を取得させる位置取得ステップと、
前記制御部に、取得された前記配置物を含む物体の相対座標に対する前記自己位置を用いた絶対座標への変換と、変換後の前記絶対座標を用いた前記自己位置推定処理での前記自己位置の推定とを繰り返す、変換ステップと、
前記変換ステップで作成された前記配置物を含む物体の絶対座標を保存して元データを作成する元データ作成ステップと、
前記情報処理装置により、前記元データから前記配置物の情報を削除することで、地図データを作成する、削除ステップと、を備える地図作成方法。
続きを表示(約 660 文字)
【請求項2】
前記特定走路において、所定の進路方向を定め、前記進路方向と交差する方向を交差方向とすると、
前記配置ステップでは、前記配置物を、前記特定走路における前記交差方向の縁部において、前記縁部よりも内側に出るように配置する、請求項1に記載の地図作成方法。
【請求項3】
前記特定走路において、所定の進路方向を定め、前記進路方向と交差する方向を交差方向とすると、
前記配置ステップでは、前記配置物を、前記特定走路における前記交差方向の両縁に配置し、
前記特定走路における前記交差方向の両縁のうち、一方の縁部に配置されている前記配置物は、他方の縁部に配置されている前記配置物と比べて、前記進路方向での位置が異なる、請求項1に記載の地図作成方法。
【請求項4】
前記特定走路は、直進路であって、
前記配置ステップでは、前記配置物を、前記進路方向に沿って配置する、請求項2又は3に記載の地図作成方法。
【請求項5】
前記特定走路は、十字路又はT字路であり、
前記配置ステップにおいて、前記配置物を、前記十字路又は前記T字路における角部に配置する、
請求項2又は3に記載の地図作成方法。
【請求項6】
前記特定走路は、十字路又はT字路が複数並んだ走路形状であり、
前記配置ステップにおいて、前記配置物を、前記十字路又は前記T字路における角部に配置する、
請求項2又は3に記載の地図作成方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地図を作成する技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
非特許文献1には、地図データを用いて自律走行を行うことが可能な自律走行装置が記載されている。自律走行装置が用いる地図データには、自律走行装置が走行可能な走路や、障害物の位置が記録されている。また、自律走行装置を用いて地図データを作成する技術も知られている。具体的には、自律走行装置を地図データの作成対象となる走路上を移動させながら、センサにより周囲の物体の相対座標を検出させていく。そして、検出された物体の相対座標を、絶対座標に変換することで、地図データを作成する。
【0003】
自律走行装置により検出される立体物の相対座標を、絶対座標に変換するためには、走行中の自律走行装置の自己位置を推定しておく必要がある。自己位置の推定方法として、車輪の回転量に基づくオドメトリ情報を用いた自己位置推定が知られている。しかし、オドメトリ情報を用いた自己位置推定では、車輪の空転等により、自己位置に誤差を生じさせる場合がある。そのため、自律走行装置の移動中に、ランドマーク等の特徴物の位置を検出させ、現在の自己位置を、検出されたランドマークの位置に基づいて修正することで、オドメトリを用いた自己位置の精度を補間する方法も知られている。
【先行技術文献】
【非特許文献】
【0004】
Slam_gmapping<https://github.com/ros-perception/slam_gmapping>
【発明の概要】
【発明が解決しようとする課題】
【0005】
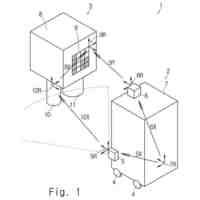
自律走行装置を走行させて、直進路や、十字路、T字路等の特定走路を含んだ地図データを作成する場合を想定する。自律走行装置を上記のような走路で走行させて地図データを作成する場合、ランドマーク等の特徴物が少なかったり無かったりするため、自己位置の推定精度が低下し、作成された地図データの精度が低下する場合がある。
【0006】
本発明は、上記課題に鑑みたものであり、特定走路を含む地図データを精度よく作成することができる地図作成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
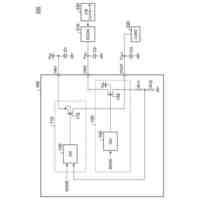
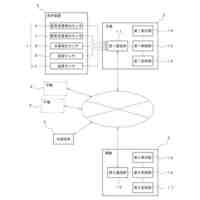
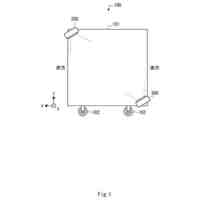
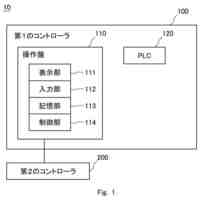
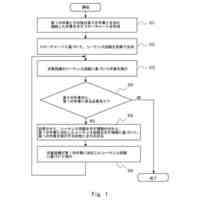
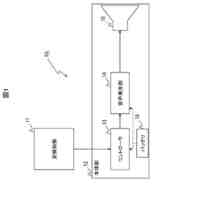
上記課題を解決するための本実施形態で開示された地図作成方法では、周囲の物体の相対距離を検出する外界センサと、車輪を有する走行部と、車輪の回転量に基づいて、移動量を計測する内界センサと、制御部と、を備える地図作成装置と、情報処理装置とにより、地図データを作成する地図作成方法に関する。地図作成装置の制御部は、走行部による走行中に、絶対座標である自己位置を推定する自己位置推定処理を実行可能な構成であり、自己位置推定処理では、内界センサにより計測された移動量に基づく自己位置の推定と、異なる自己位置での外界センサにより同一のランドマークを検出させることで得られた絶対座標に基づく自己位置の推定と、を併用することが可能である。地図データ作成方法では、地図データの作成対象に含まれる特定走路に、ランドマークになる配置物を配置する配置ステップと、走行部による走行中に、制御部に、外界センサにより検出された配置物を含む物体の相対座標を取得させる位置取得ステップと、制御部に、取得された配置物を含む物体の相対座標に対する自己位置を用いた絶対座標への変換と、変換後の絶対座標を用いた自己位置推定処理での自己位置の推定とを繰り返す、変換ステップと、変換ステップで作成された配置物を含む物体の絶対座標を保存して元データを作成する元データ作成ステップと、情報処理装置により、元データから配置物の情報を削除することで、地図データを作成する、削除ステップと、を備える
【0008】
上記構成では、地図作成装置を用いた地図作成方法では、地図データの作成対象に含まれる特定走路に、ランドマークになる配置物を配置する。走行部による走行中に、制御部に、自己位置を推定させつつ、外界センサにより検出された配置物を含む物体の相対座標を取得させる。制御部に、取得された配置物を含む物体の相対座標に対する自己位置を用いた絶対座標への変換と、変換後の絶対座標を用いた自己位置推定処理での自己位置の推定とを繰り返す。作成された配置物を含む物体の絶対座標を保存して元データを作成し、作成された元データから、配置物の情報を削除することで、地図データを作成する。これにより、地図データ作成装置が、特定走路を走行中は、ランドマークとなる配置物の絶対座標を用いて自己位置を推定し、推定された自己位置を用いて絶対座標を算出することが可能になるため、自己位置の誤差を抑制でき、ひいては地図データの精度を高めることができる。
【0009】
特定走路において、所定の進路方向を定め、進路方向と交差する方向を交差方向とすると、配置ステップでは、配置物を、特定走路における交差方向の縁部において、縁部よりも内側に出るように配置する。上記構成では、特定走路の縁部より内側に配置物が出ることで、特定走路の走路形状に変化を付加できるため、自己位置推定処理での推定精度の低下をいっそう抑制することができる。
【0010】
特定走路において、所定の進路方向を定め、進路方向と交差する方向を交差方向とすると、配置ステップでは、配置物を、特定走路における交差方向の両縁に配置し、特定走路における交差方向の両縁のうち、一方の縁部に配置されている配置物は、他方の縁部に配置されている配置物と比べて、進路方向での位置が異なる。上記構成では、地図データ作成装置を、進路方向に沿って走行させる場合に、地図データ作成装置の向きに応じて、配置物の進路方向での位置に違いが生じる。これにより、地図データ作成装置を進路方向に沿っていずれの向きで走行させる場合でも、自己位置推定処理の推定精度の低下を抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
定電圧回路
2か月前
株式会社豊田自動織機
自動走行体
9日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
基準電流源
3か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
井関農機株式会社
自立走行農作業車
2か月前
日昌電気制御株式会社
管理システム
2か月前
トヨタ自動車株式会社
移動システム
2か月前
トヨタ自動車株式会社
制御システム
1か月前
株式会社ユタカ
半自動切換装置
2か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
マーカースタンド
1か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
株式会社豊田自動織機
自律走行車両
2か月前
横河電機株式会社
電流源回路
2か月前
株式会社フカデン
外周部加工システム
19日前
住友重機械工業株式会社
自律走行台車
2か月前
株式会社デンソー
電子制御装置
8日前
マキノジェイ株式会社
工作機械
3か月前
ミツミ電機株式会社
半導体集積回路装置
1か月前
株式会社デンソー
移動体制御装置
16日前
日立建機株式会社
自律走行システム
23日前
大阪瓦斯株式会社
二次圧制御機構
26日前
大阪瓦斯株式会社
二次圧制御機構
26日前
個人
ペダル操作検知装置
2か月前
三菱電機株式会社
管理システムおよび管理方法
2か月前
横河電機株式会社
電圧電流変換回路
1か月前
アズビル株式会社
パラメータ探索装置および方法
2か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
株式会社デンソー
車両用電子制御装置
1か月前
株式会社ダイフク
搬送設備の検査装置
26日前
トヨタ自動車株式会社
充電装置
2か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ