TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024034618
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022138995
出願日
2022-09-01
発明の名称
作業システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
G05D
1/43 20240101AFI20240306BHJP(制御;調整)
要約
【課題】領域内において、複数の移動体がそれぞれ個別作業計画に従って移動しつつ複数の作業を行う場合に、移動困難になり難くすることである。
【解決手段】本作業システムにおいて、複数の移動体は、領域内を、それぞれ、各々について定められた個別作業計画に従って移動しつつ複数の作業を行う。また、複数の移動体のうちの2つ以上の移動体の、各々の個別作業計画に基づいて決まる次の作業位置に達するまでの経路に基づいて、2つ以上の移動体のうちの2つの移動体の経路が、2つの移動体が移動困難になると予測される経路であると取得された場合に、少なくとも、2つの移動体のうちの一方についての個別作業計画が変更される。その結果、領域内において、複数の移動体の各々が移動しつつ複数の作業を行う場合において、移動困難になり難くすることができる。
【選択図】図4
特許請求の範囲
【請求項1】
予め定められた領域内を、複数の移動体の各々が、それぞれに割り当てられた複数の作業の各々の作業位置を含む個別作業計画に従って移動して作業を行う作業システムであって、
前記複数の移動体のうちの前記2つ以上の移動体の各々がそれぞれの個別作業計画に基づいて決まる次の作業位置まで移動する経路に基づいて、前記2つ以上の移動体のうちの2つの移動体の各々の前記次の作業位置までの経路が、前記2つの移動体が移動困難になると予測されるものであるか否かを取得する移動困難予測経路取得部と、
前記移動困難予測経路取得部によって前記2つの移動体の各々の前記次の作業位置までの経路が、前記移動困難になると予測される経路であると取得された場合に、少なくとも、前記2つの移動体のうちの一方についての個別作業計画を変更する作業計画変更部と
を含む作業システム。
続きを表示(約 1,600 文字)
【請求項2】
前記作業計画変更部が、前記2つの移動体のうちの前記一方についての前記個別作業計画から、前記次の作業位置の作業を削除して、前記複数の移動体のうちの前記2つの移動体を除く他の1つ以上の移動体の各々についての前記個別作業計画に追加する変更を行うものである請求項1に記載の作業システム。
【請求項3】
前記領域内に、一方向一車線の2つの車線を有する通路が設けられ、
前記複数の移動体の各々が、次の作業位置の手前の方向切換位置まで、前記2つの車線のうちの一方を移動する経路を有する走行経路と、前記方向切換位置から前記次の作業位置まで、前記一方の車線から前記2つの車線のうちの他方へ移動し、前記他方の車線から前記一方の車線に戻る経路を有する作業経路とを含む経路に沿って移動するものであり、
前記2つ以上の移動体が、前記複数の移動体のうちの1つである対象移動体と、前記対象移動体と同じ通路を移動し、かつ、前記走行経路において前記対象移動体が移動する車線と反対側の車線を移動する1つ以上の移動体である他移動体とを含み、
前記2つの移動体が、前記対象移動体と、前記1つ以上の他移動体のうちの1つとを含み、
前記移動困難予測経路取得部が、前記2つの移動体の各々の前記作業経路の一部同士が重なる場合に、前記2つの移動体の各々の前記次の作業位置までの経路が、前記移動困難になると予測される経路であると取得するものである請求項1または2に記載の作業システム。
【請求項4】
前記通路に、前記通路に沿って、予め定められた設定間隔毎に複数のノードが設定され、
前記経路が、前記ノードと、互いに隣接する2つの前記ノード同士を接続するエッジとの少なくとも一方を含み、
前記移動困難予測経路取得部が、前記2つの移動体の各々の前記作業経路の各々が互いに重なる部分を含み、かつ、前記対象移動体が、前記次の作業位置に達するまでの経路のうちの前記作業経路の互いに重なる部分の手前の前記方向切換位置に達するまでの部分に含まれるノードまたはエッジの数が、前記1つ以上の他移動体の各々の前記作業経路に含まれるノードまたはエッジの数の合計から前記互いに重なる部分に含まれるノードまたはエッジの数を引いた数に対して少ない場合に、前記2つの移動体の各々の前記次の作業位置までの経路が、前記移動困難になると予測される経路であると取得するものである請求項3に記載の作業システム。
【請求項5】
前記通路に、前記通路に沿って、予め定められた設定間隔毎に複数のノードが設定され、
前記経路が、前記ノードと、互いに隣接する2つの前記ノードを接続するエッジとの少なくとも一方を含み、
前記移動困難予測経路取得部が、前記2つの移動体の各々の前記作業経路の各々が互いに重なる部分を含み、かつ、前記1つ以上の他移動体のうちの1つの前記次の作業位置までの経路のうち、前記互いに重なる部分の手前の前記方向切換位置までの部分に含まれるノードまたはエッジの数が、前記対象移動体の前記作業経路に含まれるノードまたはエッジの数の合計から前記互いに重なる部分に含まれるノードまたはエッジの数を引いた数に対して少ない場合に、前記2つの移動体の各々の前記次の作業位置までの経路が、前記移動困難になると予測される経路であると取得するものである請求項3に記載の作業システム。
【請求項6】
前記移動困難予測経路取得部が、前記複数の移動体のうちの1つの移動体である対象移動体における作業が終了した時に、前記2つの移動体の各々の前記次の作業位置までの経路が、前記移動困難になると予測される経路であるか否かを取得するものである請求項1または2に記載の作業システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、予め定められた領域内を移動体が移動して、作業を行う作業システムに関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、空港に到着した航空機に対して作業を行う複数の移動体(例えば、給油車、ベルトローラ、トーイングトラクタ、電源車等)と、これら複数の移動体を管理する管理装置とを含む作業システムが記載されている。複数の移動体は、待機位置から、航空機で決まる作業領域内の作業位置まで移動するが、作業領域内における経路が、互いに干渉しないように設定される[0033]。
【先行技術文献】
【特許文献】
【0003】
特開2021-178533号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、領域内において、複数の移動体がそれぞれ個別作業計画に従って移動しつつ複数の作業を行う場合に、移動困難になり難くすることである。
【課題を解決するための手段】
【0005】
本発明に係る作業システムにおいて、複数の移動体の各々は、領域内を、各々について定められた個別作業計画に従って移動しつつ複数の作業を行う。また、複数の移動体のうちの2つ以上の移動体の、各々の個別作業計画に基づいて決まる次の作業位置に達するまでの経路に基づいて、2つ以上の移動体のうちの2つの移動体の経路が、2つの移動体が移動困難になると予測される経路であるか否かが取得される。2つの移動体の経路が、2つの移動体が移動困難になると予測される経路であると取得された場合に、少なくとも、2つの移動体のうちの一方について定められた個別作業計画が変更される。その結果、領域内において、複数の移動体の各々が個別作業計画に従って移動しつつ複数の作業を行う場合において、移動困難になり難くすることができる。
【図面の簡単な説明】
【0006】
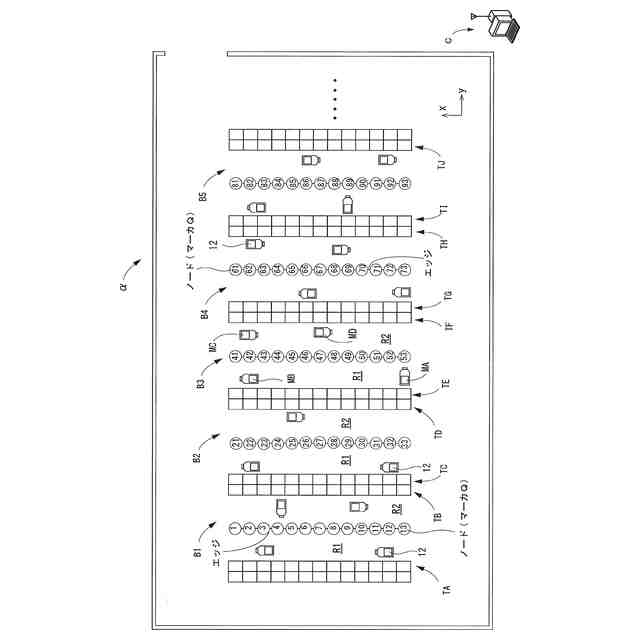
本発明の一実施形態に係る作業システムにおいて移動体が移動する領域を模式的に示す平面図である。
(2A-2C)上記複数の移動体に定められた個別作業計画を概念的に示す図である。
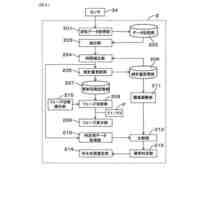
上記作業システムを概念的に示すブロック図である。
上記移動体の経路の一部を概念的に示す図である。
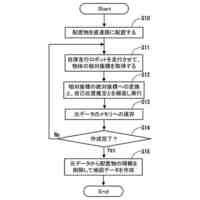
上記作業システムの管理装置に記憶された作業計画変更プログラムを表すフローチャートである。
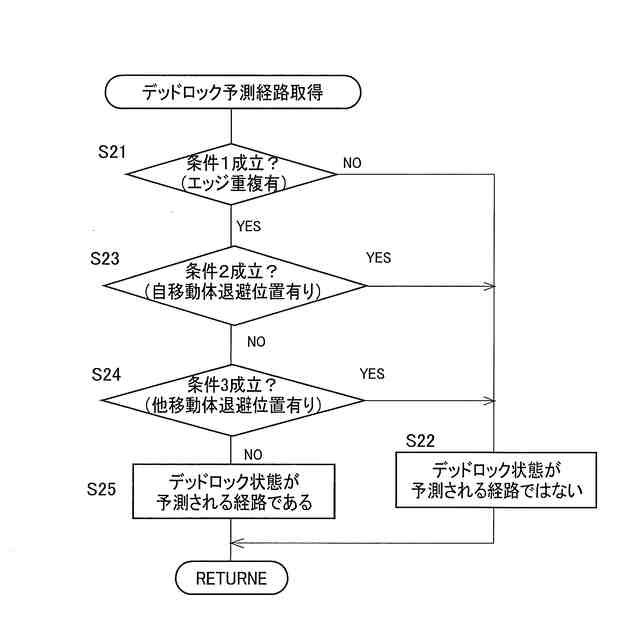
上記作業計画変更プログラムの一部を表すフローチャートである。
【発明を実施するための形態】
【0007】
以下、本発明の一実施形態に係る作業システムを、図面に基づいて詳細に説明する。
【実施例】
【0008】
図1に示すように、領域αは、例えば、複数の移動体MA,MB,・・・が、それぞれ、移動しつつ作業(例えば、領域内において棚の間の物の搬送、領域内外における物の搬送等が該当する)を行う作業領域である。領域内の複数の移動体MA,MB,・・・は管理装置Cによって管理される。
【0009】
領域αには、例えば、棚TA,TB,・・・が複数列、一方向に並んで設けられる。また、複数列の棚TA,TB,・・・のうち互いに対向して隣接する棚TA,TBの間、棚TC,TDの間、棚TE,TFの間・・・には、それぞれ、通路B1,B2,・・・が設けられる。本実施例においては、領域内において、棚TA,TB,・・・が延びた方向をx方向、棚TA,TB,・・・が並ぶ方向をy方向とする。
本実施例において、複数の通路B1,B2,・・・は、互いに平行にx方向に延びたものであり、それぞれ、一方向一車線の2つの車線、すなわち、第1車線R1および第2車線R2を備えた通路である。
【0010】
以下、棚TA,TB,・・・、通路B1,B2,・・・、移動体MA,MB,・・・、後述するマーカQ1,Q2,・・・等は、それぞれ、区別する必要がない場合、総称する場合等には、添え字1,2,・・・、A,B,・・・等を省略して記載する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
4日前
株式会社エクセディ
作業ロボット
17日前
オムロン株式会社
開発装置、開発方法
2日前
株式会社ダイフク
搬送設備
7日前
三菱電機株式会社
移動体制御装置
16日前
株式会社ダイフク
物品搬送設備
4日前
岩田工機株式会社
加工装置
16日前
村田機械株式会社
搬送車システム
22日前
株式会社デンソー
過電流検出回路
3日前
日置電機株式会社
信号出力装置および抵抗測定装置
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
シャープ株式会社
走行システム及び走行方法
2日前
富士電機株式会社
予測装置、予測方法及びプログラム
1日前
シンフォニアテクノロジー株式会社
地図作成方法
4日前
株式会社ジェイテクト
異常判定装置
3日前
豊田鉄工株式会社
車両用操作ペダル装置
7日前
トヨタ自動車株式会社
生産管理システム
10日前
株式会社豊田自動織機
シミュレーションシステム
3日前
トーヨーエイテック株式会社
空気回路及び工作機械
3日前
ローム株式会社
スレーブ回路およびそれを用いた遠隔制御システム
16日前
株式会社日本製鋼所
監視装置、押出機、情報処理方法及びプログラム
3日前
オークマ株式会社
加工異常診断のための情報更新装置及び情報更新方法
8日前
株式会社日立製作所
プラント制御システム及びプラント制御方法
15日前
オムロン株式会社
温調システム、異常判定方法および異常判定装置
2日前
株式会社リコー
情報解析方法、情報解析装置、及び情報解析システム
2日前
DMG森精機株式会社
情報処理装置および情報処理プログラム
3日前
株式会社日立システムズ
使用リソース設定方法および使用リソース設定装置
10日前
CYBERDYNE株式会社
ロボットおよびその制御方法
7日前
トヨタ自動車株式会社
制御装置、制御方法、制御プログラム
16日前
SMC株式会社
安全モジュールおよびモジュール連結体
3日前
オークマ株式会社
加工プログラム変換装置および工作機械システム
7日前
トヨタ自動車株式会社
移動体制御システム及び移動体制御方法
17日前
トヨタ自動車株式会社
制御システム、制御方法、制御プログラム
16日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ