TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058874
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166257
出願日
2022-10-17
発明の名称
移動体制御システム及び移動体制御方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G05D
1/43 20240101AFI20240422BHJP(制御;調整)
要約
【課題】ローカライズ処理を実行する移動体の安全性を向上させること。
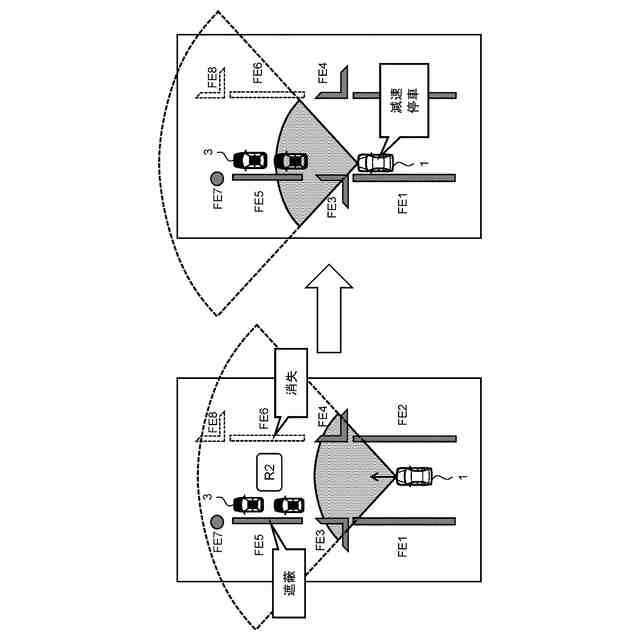
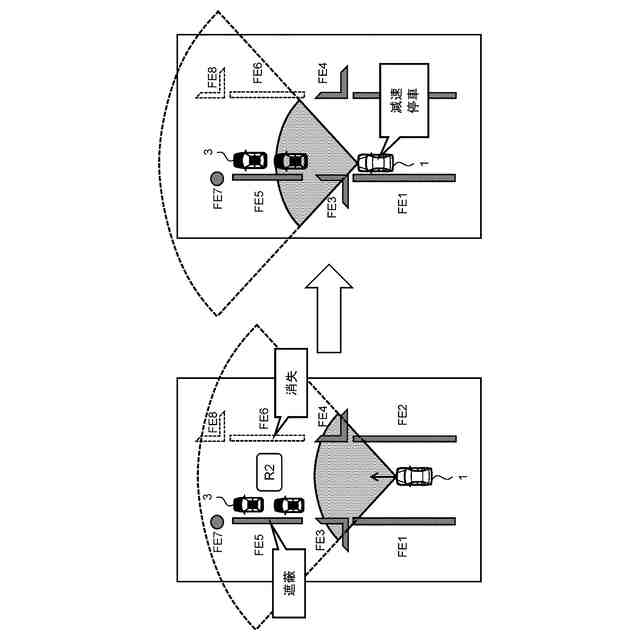
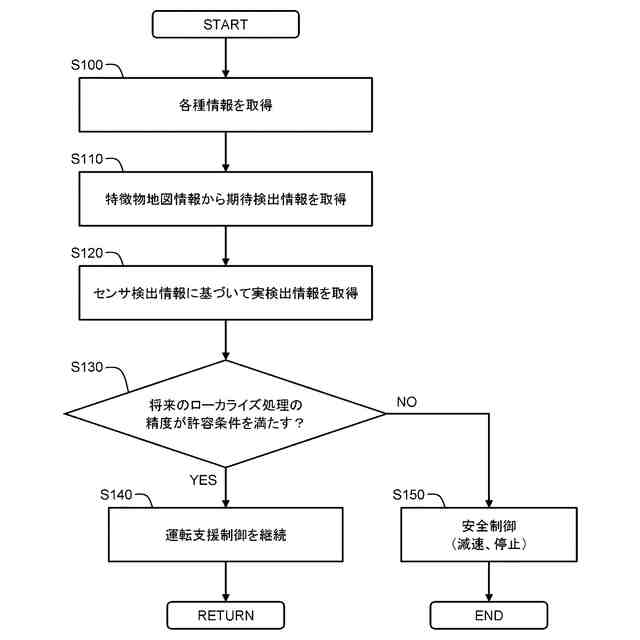
【解決手段】移動体制御システムは、外部センサによって検出されるセンサ検出情報と特徴物地図情報とに基づいて移動体の位置を推定するローカライズ処理を行う。移動体の周囲の第1範囲内に存在する特徴物は、センサ検出情報に基づいて認識可能であり、ローカライズ処理に利用される。第2範囲は、外部センサの検出可能範囲のうち第1範囲よりも遠い範囲である。期待検出情報は、第2範囲に存在する特徴物に関して検出されることが期待されるセンサ検出情報であり、特徴物地図情報から得られる。実検出情報は、期待検出情報のうち実際に検出されたセンサ検出情報である。その実検出情報に基づいて、将来のローカライズ処理の精度が許容条件を満たすかが推定される。許容条件が満たされない場合、移動体を減速あるいは停止させる。
【選択図】図5
特許請求の範囲
【請求項1】
移動体を制御する移動体制御システムであって、
特徴物の位置を示す特徴物地図情報を格納する1又は複数の記憶装置と、
前記移動体に搭載された外部センサによって検出されるセンサ検出情報を取得し、前記センサ検出情報と前記特徴物地図情報とに基づいて前記移動体の位置を推定するローカライズ処理を実行する1又は複数のプロセッサと
を備え、
前記移動体の周囲の第1範囲内に存在する前記特徴物は、前記センサ検出情報に基づいて認識可能であり、前記ローカライズ処理に利用され、
第2範囲は、前記外部センサによって検出可能な範囲のうち前記第1範囲よりも遠い範囲であり、
期待検出情報は、前記第2範囲に存在する前記特徴物に関して検出されることが期待される前記センサ検出情報であり、
前記1又は複数のプロセッサは、更に、
前記特徴物地図情報に基づいて前記期待検出情報を取得し、
前記期待検出情報のうち実際に検出された前記センサ検出情報である実検出情報を取得し、
前記実検出情報に基づいて、将来の前記ローカライズ処理の精度が許容条件を満たすか否かを推定し、
前記許容条件が満たされない場合、前記移動体を減速あるいは停止させる
移動体制御システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の移動体制御システムであって、
前記許容条件が満たされない場合、前記1又は複数のプロセッサは、前記移動体が前記第2範囲に到達する前に前記移動体を減速あるいは停止させる制御を開始する
移動体制御システム。
【請求項3】
請求項1又は2に記載の移動体制御システムであって、
前記1又は複数のプロセッサは、
前記実検出情報に基づいて、将来の前記ローカライズ処理において利用される前記特徴物の数を推定し、
前記特徴物の前記推定数に基づいて、将来の前記ローカライズ処理の前記精度が前記許容条件を満たすか否かを推定する
移動体制御システム。
【請求項4】
請求項3に記載の移動体制御システムであって、
前記1又は複数のプロセッサは、
前記期待検出情報に基づいて、将来の前記ローカライズ処理において利用可能な前記特徴物の期待数を取得し、
前記特徴物の前記推定数と前記特徴物の前記期待数との対比に基づいて、将来の前記ローカライズ処理の前記精度が前記許容条件を満たすか否かを推定する
移動体制御システム。
【請求項5】
移動体を制御する移動体制御方法であって、
特徴物の位置を示す特徴物地図情報を取得することと、
前記移動体に搭載された外部センサによって検出されるセンサ検出情報を取得することと、
前記センサ検出情報と前記特徴物地図情報とに基づいて前記移動体の位置を推定するローカライズ処理を実行することと
を含み、
前記移動体の周囲の第1範囲内に存在する前記特徴物は、前記センサ検出情報に基づいて認識可能であり、前記ローカライズ処理に利用され、
第2範囲は、前記外部センサによって検出可能な範囲のうち前記第1範囲よりも遠い範囲であり、
期待検出情報は、前記第2範囲に存在する前記特徴物に関して検出されることが期待される前記センサ検出情報であり、
前記移動体制御方法は、更に、
前記特徴物地図情報に基づいて前記期待検出情報を取得することと、
前記期待検出情報のうち実際に検出された前記センサ検出情報である実検出情報を取得することと、
前記実検出情報に基づいて、将来の前記ローカライズ処理の精度が許容条件を満たすか否かを推定することと、
前記許容条件が満たされない場合、前記移動体を減速あるいは停止させることと
を含む
移動体制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ローカライズ処理(自己位置推定処理)を実行する移動体を制御する技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1は、移動体の自己位置を推定する自己位置推定装置を開示している。自己位置推定装置は、自己位置推定処理の結果に基づいて自己位置推定精度を算出する。
【先行技術文献】
【特許文献】
【0003】
特開2021-117893号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
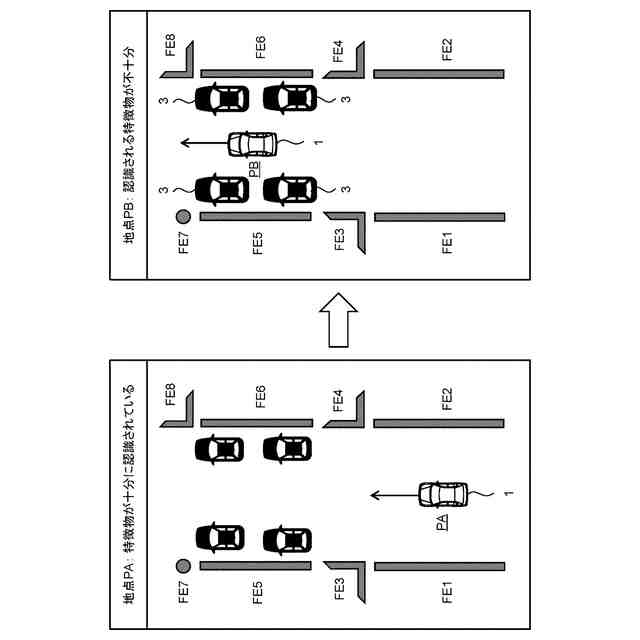
移動体の位置を推定するローカライズ処理が知られている。ローカライズ処理の精度が低下した場合、例えば、移動体を安全な場所に退避させることが考えられる。しかしながら、移動体の位置情報の精度が既に低下しているため、移動体を安全な場所に退避させるための制御は必ずしも精度良く実行されない。
【0005】
本開示の1つの目的は、ローカライズ処理を実行する移動体の安全性を向上させることができる技術を提供することにある。
【課題を解決するための手段】
【0006】
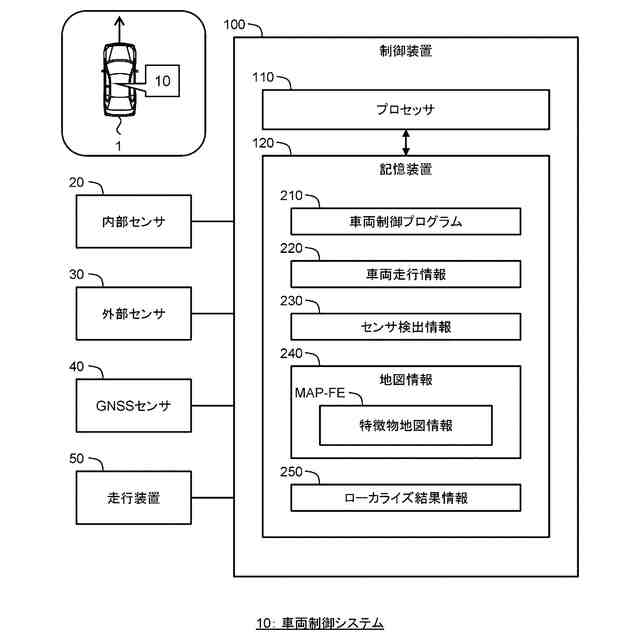
本開示の第1の観点は、移動体を制御する移動体制御システムに関連する。
移動体制御システムは、
特徴物の位置を示す特徴物地図情報を格納する1又は複数の記憶装置と、
移動体に搭載された外部センサによって検出されるセンサ検出情報を取得し、センサ検出情報と特徴物地図情報とに基づいて移動体の位置を推定するローカライズ処理を実行する1又は複数のプロセッサと
を備える。
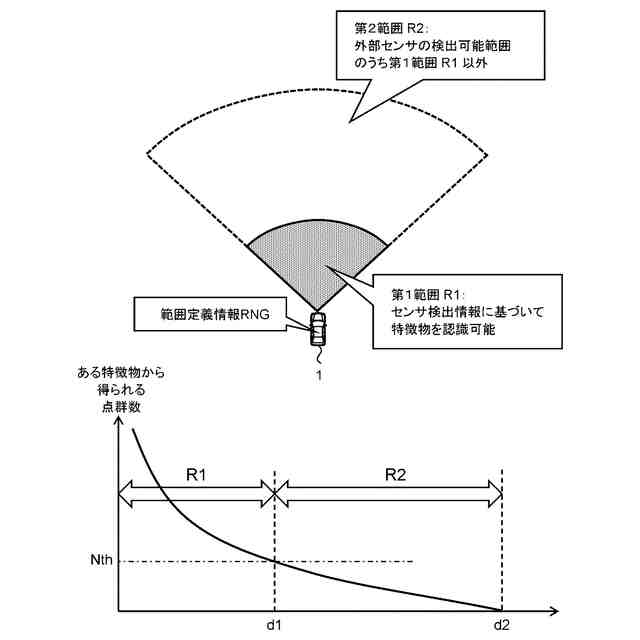
移動体の周囲の第1範囲内に存在する特徴物は、センサ検出情報に基づいて認識可能であり、ローカライズ処理に利用される。
第2範囲は、外部センサによって検出可能な範囲のうち第1範囲よりも遠い範囲である。
期待検出情報は、第2範囲に存在する特徴物に関して検出されることが期待されるセンサ検出情報である。
1又は複数のプロセッサは、更に、
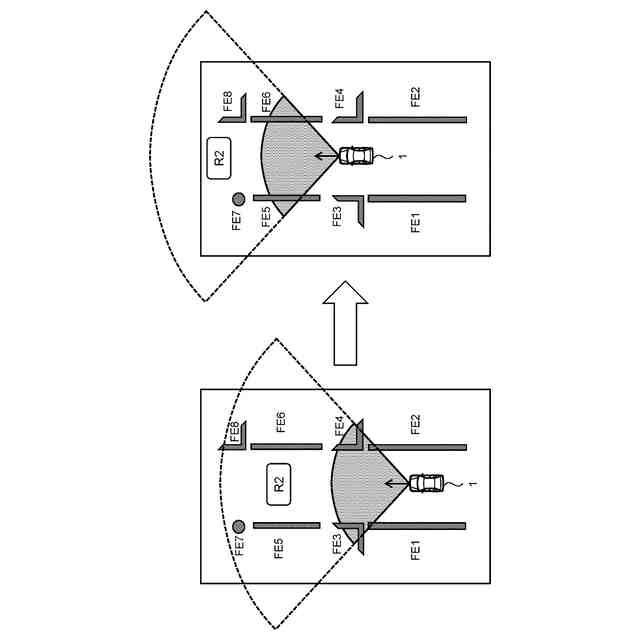
特徴物地図情報に基づいて期待検出情報を取得し、
期待検出情報のうち実際に検出されたセンサ検出情報である実検出情報を取得し、
実検出情報に基づいて、将来のローカライズ処理の精度が許容条件を満たすか否かを推定し、
許容条件が満たされない場合、移動体を減速あるいは停止させる。
【0007】
本開示の第2の観点は、移動体を制御する移動体制御方法に関連する。
移動体制御方法は、
特徴物の位置を示す特徴物地図情報を取得することと、
移動体に搭載された外部センサによって検出されるセンサ検出情報を取得することと、
センサ検出情報と特徴物地図情報とに基づいて移動体の位置を推定するローカライズ処理を実行することと
を含む。
移動体の周囲の第1範囲内に存在する特徴物は、センサ検出情報に基づいて認識可能であり、ローカライズ処理に利用される。
第2範囲は、外部センサによって検出可能な範囲のうち第1範囲よりも遠い範囲である。
期待検出情報は、第2範囲に存在する特徴物に関して検出されることが期待されるセンサ検出情報である。
移動体制御方法は、更に、
特徴物地図情報に基づいて期待検出情報を取得することと、
期待検出情報のうち実際に検出されたセンサ検出情報である実検出情報を取得することと、
実検出情報に基づいて、将来のローカライズ処理の精度が許容条件を満たすか否かを推定することと、
許容条件が満たされない場合、移動体を減速あるいは停止させることと
を含む。
【発明の効果】
【0008】
本開示によれば、将来のローカライズ処理の精度が予め評価される。将来のローカライズ処理の精度が許容条件を満たさないことが判明した場合、移動体を減速あるいは停止させる安全制御が実行される。ローカライズ処理の精度が低下する前に安全制御を実行することによって、移動体の安全性を向上させることが可能となる。
【図面の簡単な説明】
【0009】
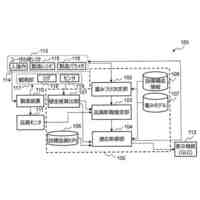
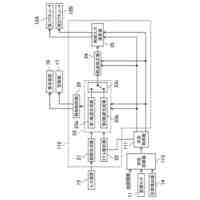
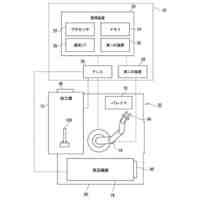
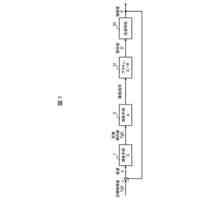
実施の形態に係る車両制御システムの概要を示すブロック図である。
ローカライズ処理に関連する課題を説明するための概念図である。
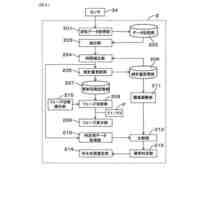
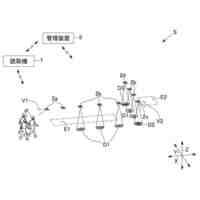
実施の形態に係る事前評価処理を説明するための概念図である。
実施の形態に係る事前評価処理の一例を説明するための概念図である。
実施の形態に係る事前評価処理の他の例を説明するための概念図である。
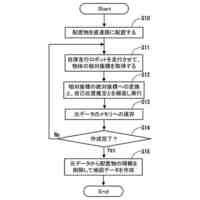
実施の形態に係る事前評価処理に関連する処理を要約的に示すフローチャートである。
【発明を実施するための形態】
【0010】
本開示は、移動体の制御に関連する。移動体としては、車両、ロボット、等が例示される。移動体は、自律走行可能であってもよい。車両は、自動運転車両であってもよい。一例として、以下の説明においては、移動体が車両である場合について考える。一般化する場合には、以下の説明における「車両」を「移動体」で読み替えるものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
13日前
アズビル株式会社
流量制御装置
1か月前
ミネベアミツミ株式会社
入力装置
1か月前
株式会社エクセディ
作業ロボット
26日前
トヨタ自動車株式会社
自動作業装置
3日前
アズビル株式会社
流量制御システム
9日前
オムロン株式会社
開発装置、開発方法
11日前
トヨタ自動車株式会社
自動走行搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
移動体制御装置
25日前
株式会社ダイフク
搬送設備
16日前
株式会社クボタ
故障診断装置
1か月前
株式会社ダイフク
物品搬送設備
13日前
岩田工機株式会社
加工装置
25日前
リックス株式会社
状態検出装置
1か月前
株式会社デンソー
過電流検出回路
12日前
村田機械株式会社
搬送車システム
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
19日前
日本精工株式会社
制御システムおよび制御方法
19日前
日本精工株式会社
制御システムおよび制御方法
19日前
日本精工株式会社
制御システムおよび制御方法
19日前
日本精工株式会社
制御システムおよび制御方法
19日前
多摩川精機株式会社
突入電流防止回路
1か月前
シャープ株式会社
走行システム及び走行方法
11日前
株式会社ディスコ
加工装置
1か月前
ローム株式会社
リニアレギュレータ
5日前
富士電機株式会社
予測装置、予測方法及びプログラム
10日前
株式会社日立製作所
設備診断装置及び設備診断方法
1か月前
清水建設株式会社
自律移動ロボット
1か月前
シンフォニアテクノロジー株式会社
地図作成方法
13日前
川崎重工業株式会社
制御システム、制御方法及び制御プログラム
9日前
株式会社ジェイテクト
異常判定装置
12日前
オークマ株式会社
セルコントローラ
9日前
株式会社日立製作所
制御装置
3日前
清水建設株式会社
自律移動ロボット
1か月前
三菱ロジスネクスト株式会社
誘導システム
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ