TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024068001
公報種別
公開特許公報(A)
公開日
2024-05-17
出願番号
2022178478
出願日
2022-11-07
発明の名称
制御システム、制御方法及び制御プログラム
出願人
川崎重工業株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20240510BHJP(制御;調整)
要約
【課題】移動体を精度よく制御する。
【解決手段】制御システム100は、第1移動体1の状態及び第2移動体9の状態を取得する状態取得器111と、第1移動体1の目標軌道を求める軌道生成器23とを備えている。軌道生成器23は、状態取得器111によって取得された第1移動体1の状態及び第2移動体9の状態、並びに、第1移動体1及び第2移動体9の両方によって定まる通行ルールに基づいて第1移動体1の目標軌道を求める。
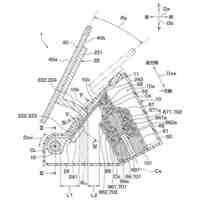
【選択図】図3
特許請求の範囲
【請求項1】
第1移動体の状態及び第2移動体の状態を取得する状態取得器と、
前記第1移動体の目標軌道を求める軌道生成器とを備え、
前記軌道生成器は、前記状態取得器によって取得された前記第1移動体の状態及び前記第2移動体の状態、並びに、前記第1移動体及び前記第2移動体の両方によって定まる通行ルールに基づいて前記第1移動体の目標軌道を求める制御システム。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の制御システムにおいて、
前記軌道生成器は、前記第1移動体及び前記第2移動体のそれぞれの動きを予測して、前記第2移動体の動きに対して前記第1移動体が前記通行ルールを順守する前記目標軌道を求める制御システム。
【請求項3】
請求項2に記載の制御システムにおいて、
前記軌道生成器は、前記第2移動体の動特性に基づいて前記第2移動体の動きを予測する制御システム。
【請求項4】
請求項1に記載の制御システムにおいて、
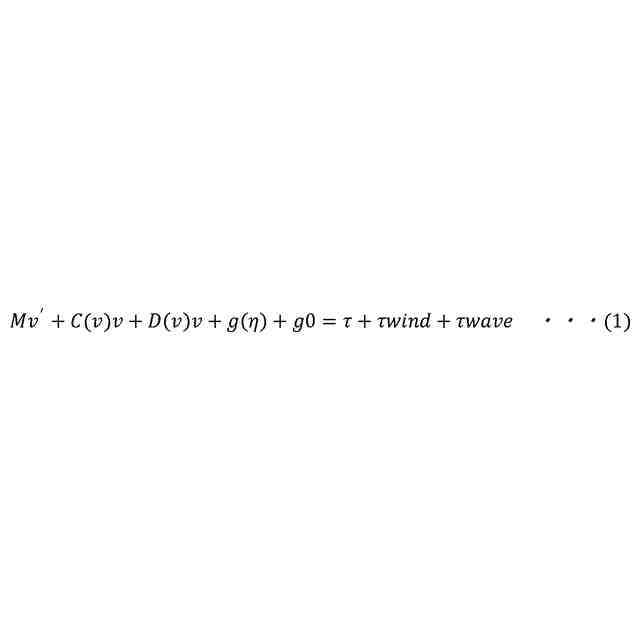
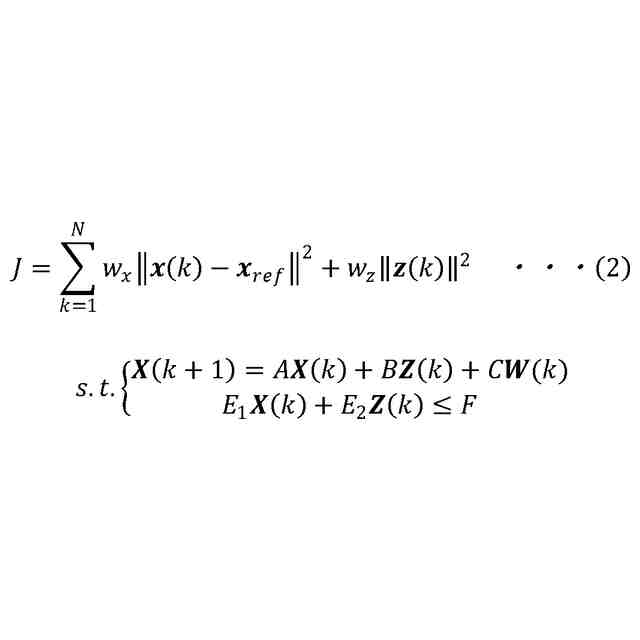
前記軌道生成器は、前記第1移動体及び前記第2移動体が所定の運動方程式に従って動くこと、並びに、前記第1移動体及び前記第2移動体が前記通行ルールを順守することを制約条件として、前記第1移動体の現在位置と目標位置との偏差及び前記第1移動体の制御入力に基づく評価関数を最適化する最適化問題を解くことによって、前記目標軌道を算出する制御システム。
【請求項5】
請求項4に記載の制御システムにおいて、
前記軌道生成器は、インデックス変数を用いて前記通行ルールを表現して、前記第1移動体及び前記第2移動体の状態量と前記インデックス変数とを同時に最適化する混合整数二次計画問題の最適解探索を実行することによって、前記目標軌道を算出する制御システム。
【請求項6】
請求項4に記載の制御システムにおいて、
前記軌道生成器は、前記目標軌道を算出する際に、前記目標軌道を探索する範囲を限定する制御システム。
【請求項7】
請求項4又は5に記載の制御システムにおいて、
前記軌道生成器によって求められた前記目標軌道を、前記第1移動体が障害を回避するように修正する軌道修正器をさらに備えている制御システム。
【請求項8】
請求項1乃至6の何れか1つに記載の制御システムにおいて、
前記第1移動体が備える表示装置又は警報器を介して前記目標軌道をユーザに報知する報知制御器をさらに備える制御システム。
【請求項9】
第1移動体の状態を取得することと、
第2移動体の状態を取得することと、
前記第1移動体の目標軌道を求めることを含み、
前記目標軌道を求めることは、前記第1移動体の状態及び前記第2移動体の状態、並びに、前記第1移動体及び前記第2移動体の両方によって定まる通行ルールに基づいて前記第1移動体の目標軌道を求める制御方法。
【請求項10】
第1移動体の状態を取得する機能と、
第2移動体の状態を取得する機能と、
前記第1移動体の目標軌道を求める機能とをコンピュータに実現させ、
前記目標軌道を求める機能は、前記第1移動体の状態及び前記第2移動体の状態、並びに、前記第1移動体及び前記第2移動体の両方によって定まる通行ルールに基づいて前記第1移動体の目標軌道を求める制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、制御システム、制御方法及び制御プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来より、移動体の通行を制御する制御システムが知られている。例えば、特許文献1に開示された制御システムは、自移動体が発進待機している際に自移動体と他移動体との関係を判断し、その判断結果に応じて自移動体の後退、進行及び停止を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2021-60919号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の制御システムは、自移動体が交差点に進入するときに自移動体と他移動体との関係を判断している。つまり、この制御システムは、自移動体の移動を他移動体との関係で調整する必要が生じた時点で、自移動体と他移動体との関係を判断し、自移動体の通行態様を決定する。
【0005】
しかしながら、このような制御では、自移動体は、制御システムの判断に即座に対応する必要がある。例えば、自移動体が移動している際に前述のような制御を行う場合、移動中の自移動体には慣性力が作用しているため、自移動体は即座に回避又は停止することが困難である。そのため、自移動体を想定通りに制御することが難しい。
【0006】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、自移動体を精度よく制御することにある。
【課題を解決するための手段】
【0007】
本開示の制御システムは、第1移動体の状態及び第2移動体の状態を取得する状態取得器と、前記第1移動体の目標軌道を求める軌道生成器とを備え、前記軌道生成器は、前記状態取得器によって取得され前記第1移動体の状態及び前記第2移動体の状態、並びに、前記第1移動体及び前記第2移動体の両方によって定まる通行ルールに基づいて前記第1移動体の目標軌道を求める。
【0008】
本開示の制御方法は、第1移動体の状態を取得することと、第2移動体の状態を取得することと、前記第1移動体の目標軌道を求めることを含み、前記目標軌道を求めることは、前記第1移動体の状態及び前記第2移動体の状態、並びに、前記第1移動体及び前記第2移動体の両方によって定まる通行ルールに基づいて前記第1移動体の目標軌道を求める。
【0009】
本開示の制御プログラムは、第1移動体の状態を取得する機能と、第2移動体の状態を取得する機能と、前記第1移動体の目標軌道を求める機能とをコンピュータに実現させ、前記目標軌道を求める機能は、前記第1移動体の状態及び前記第2移動体の状態、並びに、前記第1移動体及び前記第2移動体の両方によって定まる通行ルールに基づいて前記第1移動体の目標軌道を求める。
【発明の効果】
【0010】
前記制御装置によれば、自移動体を精度よく制御することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
16日前
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
2か月前
株式会社エクセディ
作業ロボット
1か月前
ミネベアミツミ株式会社
入力装置
2か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
トヨタ自動車株式会社
自動走行搬送車
2か月前
オムロン株式会社
開発装置、開発方法
1か月前
三菱電機株式会社
移動体制御装置
1か月前
エイブリック株式会社
ボルテージレギュレータ
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社クボタ
故障診断装置
2か月前
リックス株式会社
状態検出装置
2か月前
マキノジェイ株式会社
工作機械
15日前
岩田工機株式会社
加工装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
搬送車システム
2か月前
オムロン株式会社
サポート装置およびサポート方法
15日前
村田機械株式会社
無人搬送車システム
28日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
ローム株式会社
電圧生成回路
13日前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
横河電機株式会社
ロボット管理システム
23日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
ペダル装置
15日前
シャープ株式会社
走行システム及び走行方法
1か月前
多摩川精機株式会社
突入電流防止回路
2か月前
オークマ株式会社
工作機械の制御方法及び制御装置
1日前
株式会社ディスコ
加工装置
2か月前
ローム株式会社
リニアレギュレータ
1か月前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ