TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024070424
公報種別
公開特許公報(A)
公開日
2024-05-23
出願番号
2022180902
出願日
2022-11-11
発明の名称
制御装置
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G05B
11/36 20060101AFI20240516BHJP(制御;調整)
要約
【課題】非線形性でかつその非線形性が諸条件で変化するような制御対象に対しても高精度かつ高ロバストな制御系を構築可能な技術を提供する。
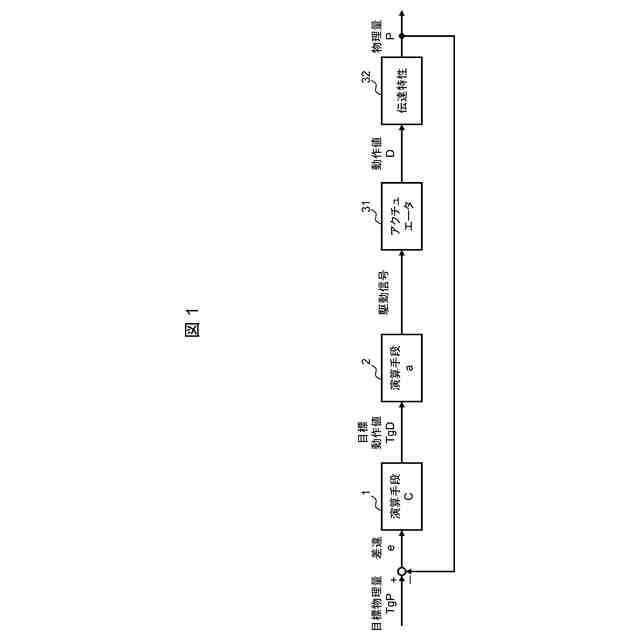
【解決手段】アクチュエータを用いて、なんらかの物理量を制御する制御系において、前記物理量の目標値と直接的もしくは間接的に検出した実際の物理量Pとの差違eに基づいて、前記アクチュエータの目標動作値TgDを演算する手段Cと、前記目標動作値TgDもしくは前記目標動作値TgDに基づいて演算された第2の目標動作値TgD2から前記アクチュエータの駆動信号を演算する手段aとを備え、前記手段aは、前記アクチュエータが動作する際、もっとも応答が遅くなる動作条件における前記アクチュエータの動作値と前記アクチュエータの駆動信号の関係を表していることを特徴とする制御装置である。
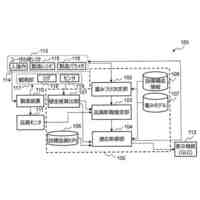
【選択図】図1
特許請求の範囲
【請求項1】
アクチュエータを用いて、なんらかの物理量を制御する制御系において、
前記物理量の目標値と直接的もしくは間接的に検出した実際の物理量Pとの差違eに基づいて、前記アクチュエータの目標動作値TgDを演算する手段Cと
前記目標動作値TgDもしくは前記目標動作値TgDに基づいて演算された第2の目標動作値TgD2から前記アクチュエータの駆動信号を演算する手段aとを備え、
前記手段aは、前記アクチュエータが動作する際、もっとも応答が遅くなる動作条件における前記アクチュエータの動作値と前記アクチュエータの駆動信号の関係を表していることを
特徴とする制御装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1において、
前記差違eが所定値以下のとき、もしくは前記物理量Pが所定値に達したとき、
前記アクチュエータの駆動信号を0に変更する手段をさらに備えたことを
特徴とする制御装置。
【請求項3】
請求項1において、
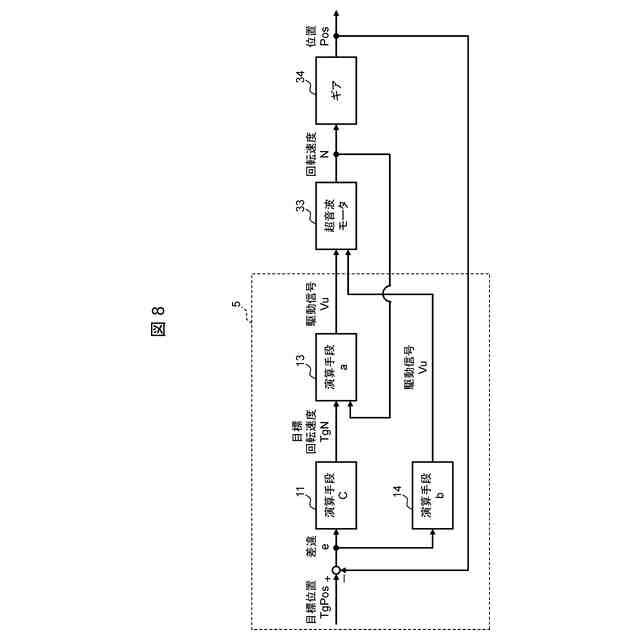
超音波モータを用いて位置決め制御する制御系において、
目標位置と直接的もしくは間接的に検出した実際の位置Posとの差違eに
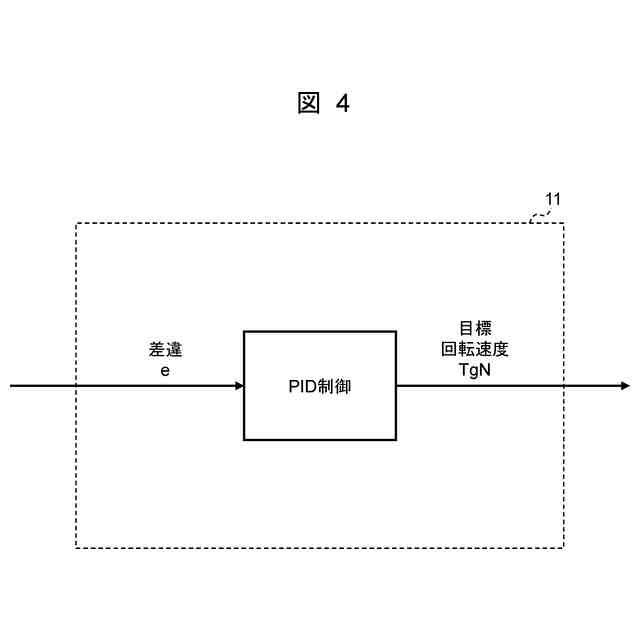
基づいて、前記超音波モータの目標回転速度TgNを演算する手段Cと
前記目標回転速度TgNもしくは前記目標回転速度TgNに基づいて演算された第2の目標回転速度TgN2から前記超音波モータの駆動信号を演算する手段aとを備え、
前記手段aは、前記超音波モータが動作する際に、もっとも応答性が遅くなる条件における前記超音波モータの回転速度と前記超音波モータの駆動信号の関係を表していることを
特徴とする制御装置。
【請求項4】
請求項1において、
前記手段aは、超音波モータが動作する際の上限温度における前記超音波モータの回転速度と前記超音波モータの駆動信号の関係を表していることを
特徴とする制御装置。
【請求項5】
請求項1において、
超音波モータを用いて位置決め制御する制御系において、
目標位置と直接的もしくは間接的に検出した実際の位置Posとの差違eに
基づいて、前記超音波モータの目標回転速度TgNを演算する手段Cと
前記目標回転速度TgNもしくは前記目標回転速度TgNに基づいて演算された第2の目標回転速度TgN2から前記超音波モータの駆動信号を演算する手段aとを備え、
前記手段aは、前記超音波モータが動作する際に、もっとも応答性が遅くなる条件における前記超音波モータの回転速度と前記超音波モータの駆動信号の関係を表し、
前記差違eが所定値以下のとき、もしくは位置Posが所定値に達したとき、前記超音波モータを停止する駆動信号に変更する手段を有したことを
特徴とする制御装置。
【請求項6】
請求項1において、
超音波モータを用いて位置決め制御する制御系において、
目標位置と直接的もしくは間接的に検出した実際の位置Posとの差違eに
基づいて、前記超音波モータの目標回転速度TgNを演算する手段Cと
前記目標回転速度TgNもしくは前記目標回転速度TgNに基づいて演算された第2の目標回転速度TgN2から前記超音波モータの駆動信号を演算する手段aとを備え、
前記手段aは、前記超音波モータが動作する際の上限温度における前記超音波モータの回転速度と前記超音波モータの駆動信号の関係を表し、
前記差違eが所定値以下のとき、もしくは位置Posが所定値に達したとき、前記超音波モータを停止する駆動信号に変更する手段を有したことを
特徴とする制御装置。
【請求項7】
請求項3において、前記目標位置と直接的もしくは間接的に検出した実際の位置Posとの差違eに基づいて、前記超音波モータの目標回転速度TgNを演算する手段Cは、PID制御であることを
特徴とする制御装置。
【請求項8】
請求項6において、前記超音波モータの駆動信号を演算する手段aは、
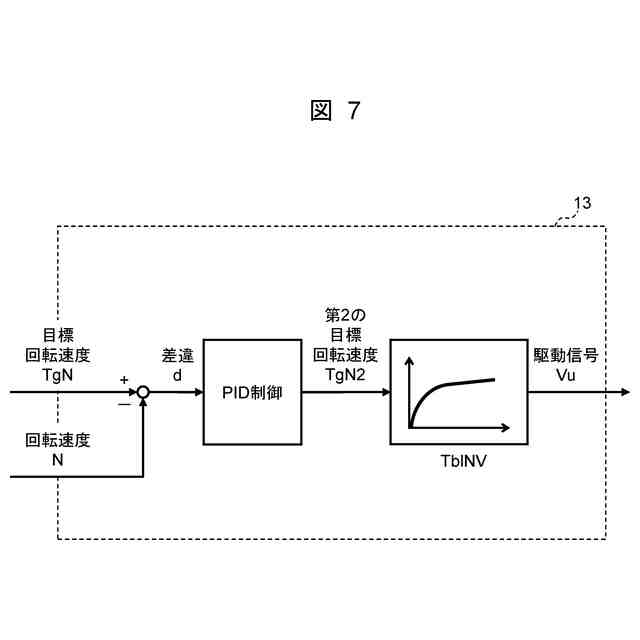
前記目標回転速度TgNと直接的もしくは間接的に検出した前記超音波モータの実際の回転速度との差違dを演算する手段と、
前記差違dが小さくなるように演算される前記第2の目標回転速度TgN2を演算する手段と、
前記第2の目標回転速度TgN2から前記超音波モータの駆動信号を演算する手段とを含むことを
特徴とする制御装置。
【請求項9】
請求項8において、前記差違dが小さくなるように演算される前記第2の目標回転速度TgN2を演算する手段は、PID制御であることを
特徴とする制御装置。
【請求項10】
請求項1において、前記アクチュエータを用いて、なんらかの物理量を制御する制御系は、制御対象が、ヒータもしくは弁であることを
特徴とする制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関するものであり、特に、制御対象が非線形である一方で、非線形性に対応するためのセンサを用いない制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
本技術の背景技術として、特開平9-271185(特許文献1)がある。この特許文献1には、「負荷を連動する超音波モ-タを制御し、負荷が目標位置に変動したとき、このモ-タ駆動を停止させて負荷を位置決めする超音波モ-タの制御装置において、モ-タ連動によって変動した負荷が予め定めた停止位置に近付いた所定位置から、モ-タ速度を徐々に減速させ、負荷が停止位置に変動したときのモ-タ減速度においてモ-タ駆動を停止させる制御手段を備えたことを特徴とする超音波モ-タの制御装置」が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平9-271185
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述の先行技術(特許文献1)は、位置に対して目標速度が予め決められており、ノイズ、量産ばらつき、経時変化に対応できず、所望の位置プロフィールの軌道が描けなかったり、応答時間にばらつきが発生したりする。また、超音波モータの非線形性、温度感度が考慮されておらず、同様の問題が発生しやすくなる。また、制御系が線形ではないので、PID制御、データ駆動制御などの既存の線形制御が適用できないあるいは適用しても理論通りの性能が得られず、高い制御精度は得られない。
【課題を解決するための手段】
【0005】
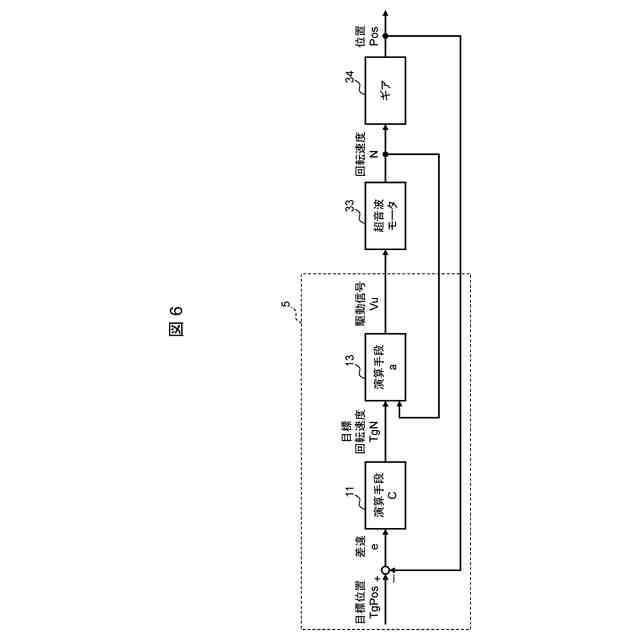
上記課題を解決するために、例えば特許請求の範囲の記載の構成を採用する。本願は、上記課題を解決する手段を複数含んでいるが、例えば、
アクチュエータを用いて、なんらかの物理量を制御する制御系において、
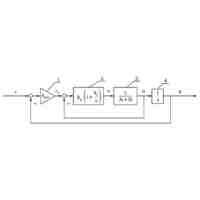
前記物理量の目標値と直接的もしくは間接的に検出した実際の物理量Pとの差違eに基づいて、前記アクチュエータの目標動作値TgDを演算する手段Cと
前記目標動作値TgDもしくは前記目標動作値TgDに基づいて演算された第2の目標動作値TgD2から前記アクチュエータの駆動信号を演算する手段aとを備え、
前記手段aは、前記アクチュエータが動作する際、もっとも応答が遅くなる動作条件における前記アクチュエータの動作値と前記アクチュエータの駆動信号の関係を表していることを
特徴とする制御装置である。
【0006】
また、例えば、
前記差違eが所定値以下のとき、もしくは前記物理量Pが所定値に達したとき、
前記アクチュエータの駆動信号を0に変更する手段をさらに備えたことを
特徴とする制御装置である。
【0007】
また、例えば、
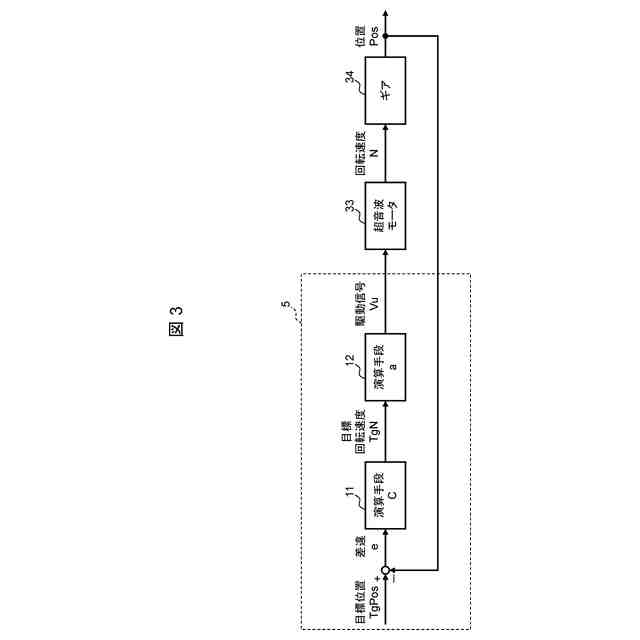
超音波モータを用いて位置決め制御する制御系において、
目標位置と直接的もしくは間接的に検出した実際の位置Posとの差違eに
基づいて、前記超音波モータの目標回転速度TgNを演算する手段Cと
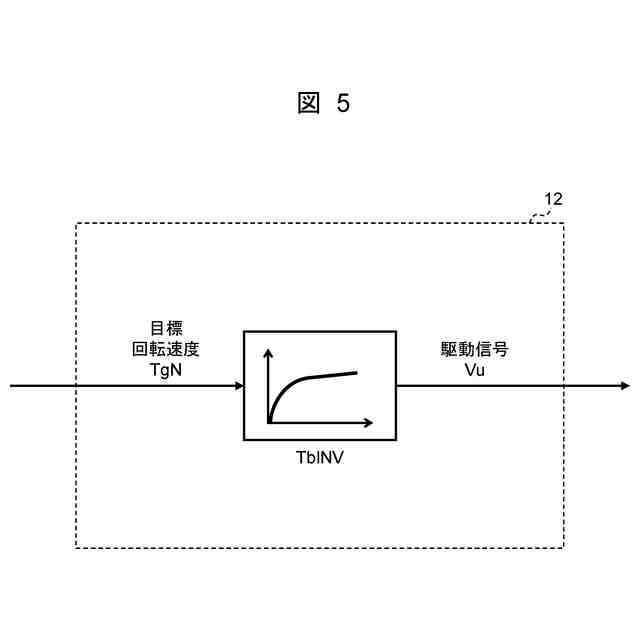
前記目標回転速度TgNもしくは前記目標回転速度TgNに基づいて演算された第2の目標回転速度TgN2から前記超音波モータの駆動信号(電圧)を演算する手段aとを備え、
前記手段aは、前記超音波モータが動作する際に、もっとも応答性が遅くなる条件における前記超音波モータの回転速度と前記超音波モータの駆動信号(電圧)の関係を表していることを
特徴とする制御装置である。
【0008】
また、例えば、
前記手段aは、前記超音波モータが動作する際の上限温度(起きえる最高温度)における前記超音波モータの回転速度と前記超音波モータの駆動信号(電圧)の関係を表していることを
特徴とする制御装置である。
【0009】
また、例えば、
超音波モータを用いて位置決め制御する制御系において、
目標位置と直接的もしくは間接的に検出した実際の位置Posとの差違eに
基づいて、前記超音波モータの目標回転速度TgNを演算する手段Cと
前記目標回転速度TgNもしくは前記目標回転速度TgNに基づいて演算された第2の目標回転速度TgN2から前記超音波モータの駆動信号(電圧)を演算する手段aとを備え、
前記手段aは、前記超音波モータが動作する際に、もっとも応答性が遅くなる条件における前記超音波モータの回転速度と前記超音波モータの駆動信号(電圧)の関係を表し、
前記差違eが所定値以下のとき、もしくは位置Posが所定値に達したとき、前記超音波モータを停止する駆動信号(電圧)に変更する手段を有したことを
特徴とする制御装置である。
【0010】
また、例えば、
超音波モータを用いて位置決め制御する制御系において、
目標位置と直接的もしくは間接的に検出した実際の位置Posとの差違eに
基づいて、前記超音波モータの目標回転速度TgNを演算する手段Cと
前記目標回転速度TgNもしくは前記目標回転速度TgNに基づいて演算された第2の目標回転速度TgN2から前記超音波モータの駆動信号(電圧)を演算する手段aとを備え、
前記手段aは、前記超音波モータが動作する際の上限温度(起きえる最高温度)における前記超音波モータの回転速度と前記超音波モータの駆動信号(電圧)の関係を表し、
前記差違eが所定値以下のとき、もしくは位置Posが所定値に達したとき、前記超音波モータを停止する駆動信号(電圧)に変更する手段を有したことを
特徴とする制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
16日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
アズビル株式会社
流量制御システム
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
株式会社ダイフク
搬送設備
1か月前
三菱電機株式会社
移動体制御装置
1か月前
岩田工機株式会社
加工装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
マキノジェイ株式会社
工作機械
15日前
村田機械株式会社
搬送車システム
2か月前
株式会社デンソー
過電流検出回路
1か月前
オムロン株式会社
サポート装置およびサポート方法
15日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
村田機械株式会社
無人搬送車システム
28日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
横河電機株式会社
ロボット管理システム
23日前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
電圧生成回路
13日前
日本精工株式会社
制御システムおよび制御方法
1か月前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
株式会社デンソー
ペダル装置
15日前
シャープ株式会社
走行システム及び走行方法
1か月前
オークマ株式会社
工作機械の制御方法及び制御装置
1日前
多摩川精機株式会社
突入電流防止回路
2か月前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
株式会社ディスコ
加工装置
2か月前
ローム株式会社
リニアレギュレータ
1か月前
アマノ株式会社
自律走行装置およびその妥当性評価方法
21日前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
8日前
株式会社日立製作所
設備診断装置及び設備診断方法
2か月前
株式会社ジェイテクト
異常判定装置
1か月前
オークマ株式会社
セルコントローラ
1か月前
シンフォニアテクノロジー株式会社
地図作成方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ