TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024067377
公報種別
公開特許公報(A)
公開日
2024-05-17
出願番号
2022177408
出願日
2022-11-04
発明の名称
セルコントローラ
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G05B
19/18 20060101AFI20240510BHJP(制御;調整)
要約
【課題】加工セルが異常停止した際に、オペレータが当該加工セルを容易に復旧できるセルコントローラを提供する。
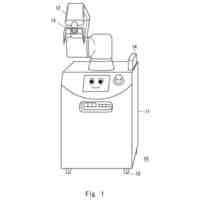
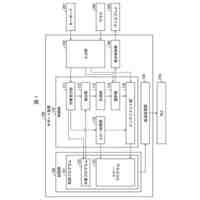
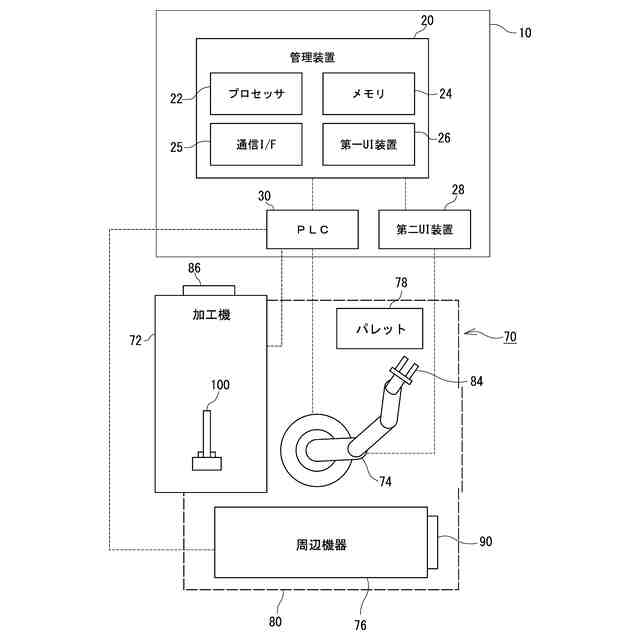
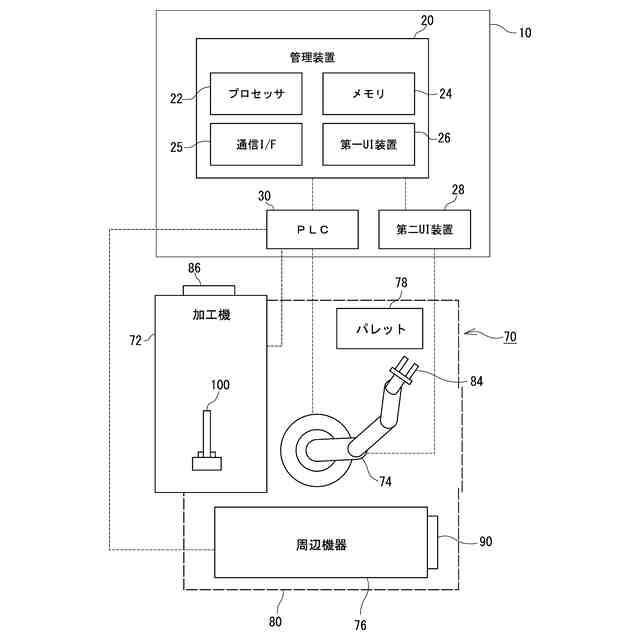
【解決手段】セルコントローラ10は、複数の作業リソースを含む加工セル70を制御する。複数の作業リソースは、1以上の加工機72と、1以上のロボット74と、を含む。セルコントローラ10は、PLC30と、管理装置20と、を含み、前記PLC30は、前記管理装置20からの指示に従って、前記複数の作業リソースの動作を制御するとともに、前記複数の作業リソースとワーク100を含む複数の作業要素の状態を取得する。前記管理装置20は、前記加工セル70の異常停止が発生した場合、前記複数の作業要素それぞれの復旧可能状態を特定し、前記複数の作業要素それぞれを前記復旧可能状態に遷移させるための復旧手順のガイドをオペレータに提示する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の作業リソースを含む加工セルを制御するセルコントローラであって、
前記複数の作業リソースは、1以上の加工機と、1以上のロボットと、を含み、
前記セルコントローラは、PLCと、管理装置と、を含み、
前記PLCは、前記管理装置からの指示に従って、前記複数の作業リソースの動作を制御するとともに、前記複数の作業リソースとワークを含む複数の作業要素の状態を取得し、
前記管理装置は、前記加工セルの異常停止が発生した場合、前記複数の作業要素それぞれの復旧可能状態を特定し、前記複数の作業要素それぞれを前記復旧可能状態に遷移させるための復旧手順のガイドをオペレータに提示する、
ことを特徴とするセルコントローラ。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載のセルコントローラであって、
前記管理装置は、
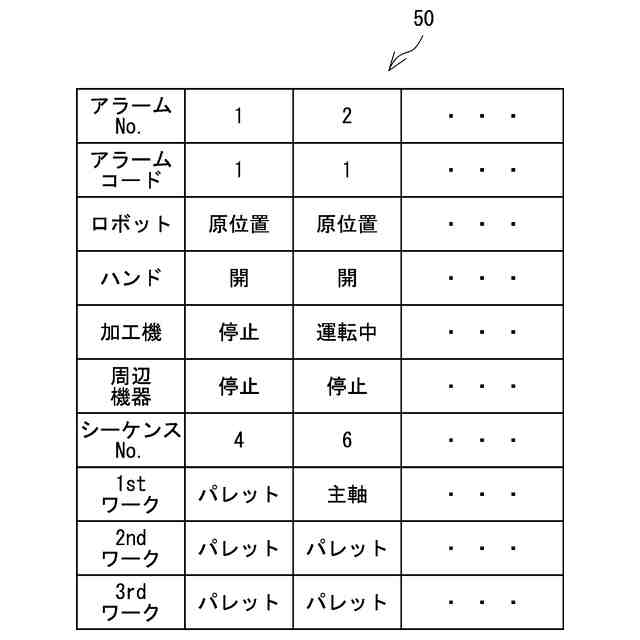
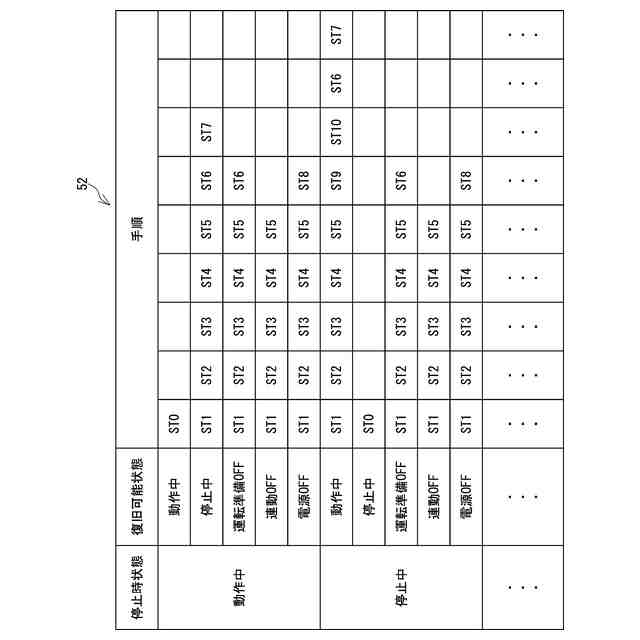
前記複数の作業要素それぞれの前記復旧可能状態をアラーム種類ごとに記録した復旧条件情報と、前記複数の作業要素それぞれの前記復旧手順を前記復旧可能状態ごとに記録した遷移情報と、を予め記憶しており、
前記復旧条件情報に基づいて、前記複数の作業要素それぞれの前記復旧可能状態を特定し、
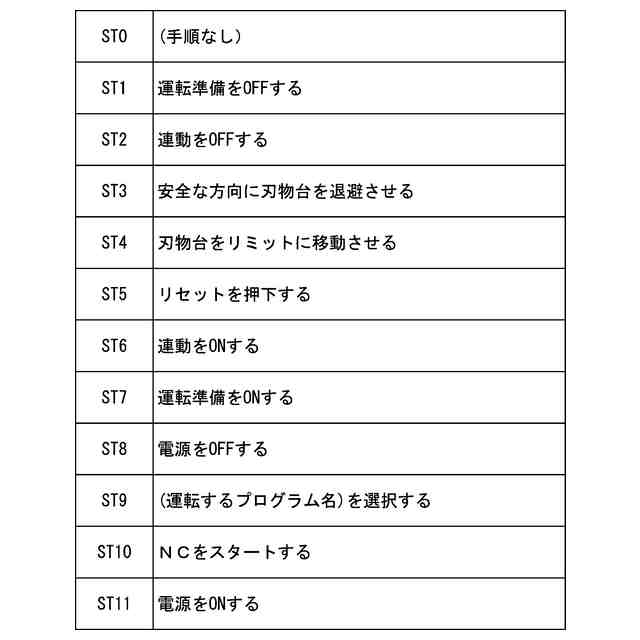
前記遷移情報に基づいて、前記復旧手順を特定する、
ことを特徴とするセルコントローラ。
【請求項3】
請求項1に記載のセルコントローラであって、
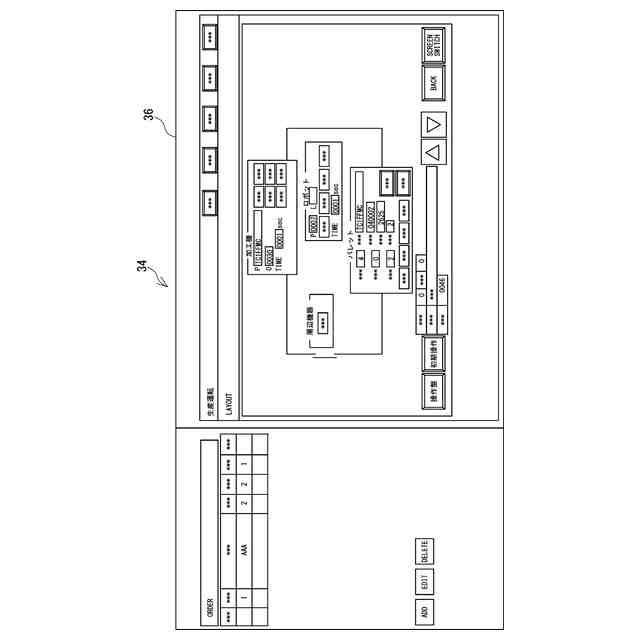
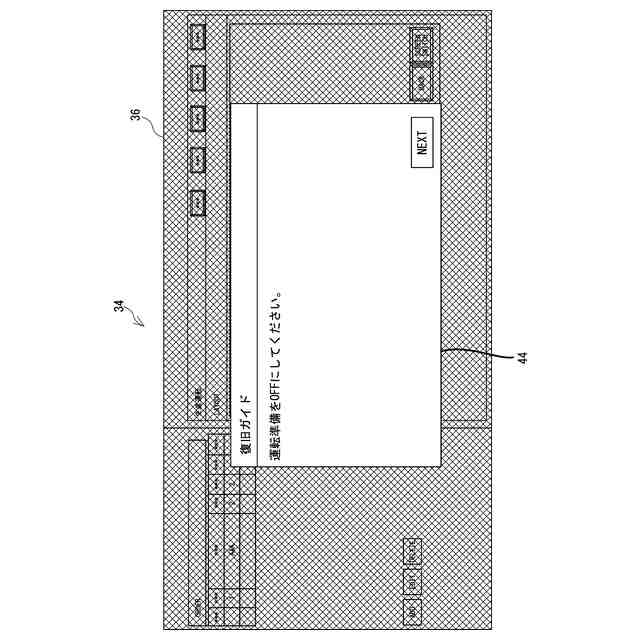
前記管理装置は、前記作業要素に応じて、前記ガイドを提示するUI装置を変更する、ことを特徴とするセルコントローラ。
【請求項4】
請求項3に記載のセルコントローラであって、
前記加工セルは、前記ロボットを取り囲む安全柵を有し、
前記管理装置は、前記安全柵の外側に設けられた第一UI装置を有し、
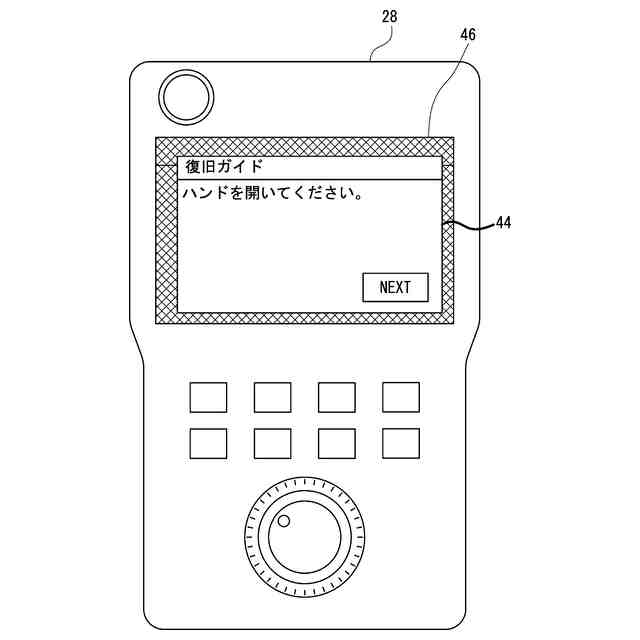
前記セルコントローラは、さらに、前記ロボットをマニュアル操作可能であり、可搬型の第二UI装置を有しており、
前記管理装置は、前記加工機に関する前記ガイドを、前記第一UI装置を介して前記オペレータに提示し、前記ロボットに関する前記ガイドを、前記第二UI装置を介して前記オペレータに提示する、
ことを特徴とするセルコントローラ。
【請求項5】
請求項1に記載のセルコントローラであって、
前記管理装置は、前記作業要素に応じて、前記復旧手順で前記オペレータに操作させるUI装置を変更する、ことを特徴とするセルコントローラ。
【請求項6】
請求項5に記載のセルコントローラであって、
前記加工機は、NC操作盤を有しており、
前記セルコントローラは、さらに、前記ロボットをマニュアル操作可能で、可搬型の第二UI装置を有しており、
前記加工機に関する前記復旧手順は、前記NC操作盤の操作を含み、
前記ロボットに関する前記復旧手順は、前記第二UI装置の操作を含む、
ことを特徴とするセルコントローラ。
【請求項7】
請求項1に記載のセルコントローラであって、
前記加工機は、NC操作盤を含み、
前記管理装置は、第一UI装置を有しており、
前記加工機に関する前記復旧手順は、前記NC操作盤への操作を含み、
前記管理装置は、前記加工機に関する前記ガイドを前記第一UI装置を介して前記オペレータに提示する、
ことを特徴とするセルコントローラ。
【請求項8】
請求項1に記載のセルコントローラであって、
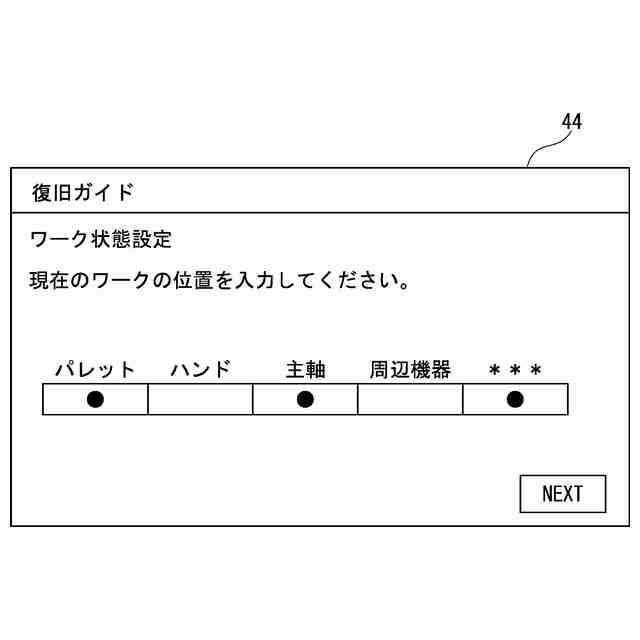
前記ワークに関する前記復旧手順は、前記ワークの移動と、前記ワークの移動後位置の入力操作を含み、
前記管理装置は、前記オペレータから入力された前記移動後位置を前記PLCに登録する、
ことを特徴とするセルコントローラ。
【請求項9】
請求項1に記載のセルコントローラであって、
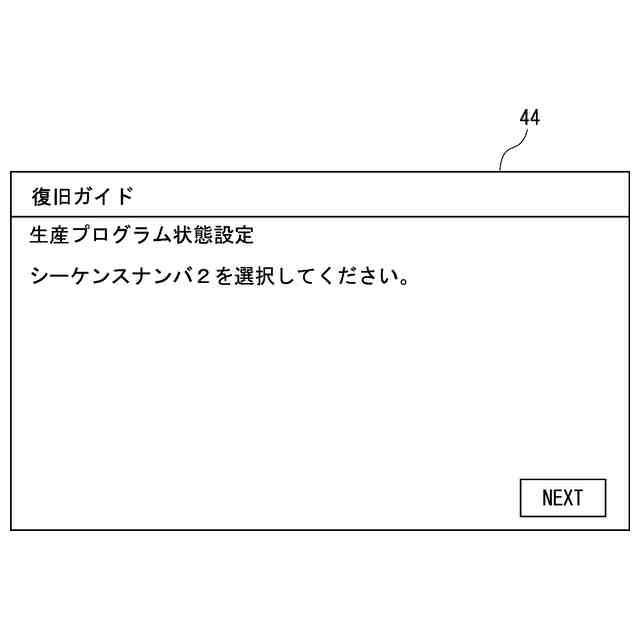
前記管理装置は、前記ロボットに関する前記復旧手順の完了後に、前記ワークに関する前記ガイドを前記オペレータに提示する、
ことを特徴とするセルコントローラ。
【請求項10】
複数の作業リソースを含む加工セルを制御するセルコントローラであって、
前記複数の作業リソースは、1以上の加工機と、1以上のロボットと、を含み、
前記セルコントローラは、プロセッサと、メモリと、1以上のUI装置と、を含み、
前記プロセッサは、
前記複数の作業リソースの動作を制御するとともに、前記複数の作業リソースとワークを含む複数の作業要素の状態を取得し、
前記加工セルの異常停止が発生した場合、前記複数の作業要素それぞれの復旧可能状態を特定し、
前記複数の作業要素それぞれを前記復旧可能状態に遷移させるための手順である復旧手順のガイドを、前記1以上のUI装置を介してオペレータに提示する、
ように構成されている、ことを特徴とするセルコントローラ。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、複数の作業リソースを有する加工セルを制御するセルコントローラを開示する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、複数の作業リソース、例えば、加工機やロボット等を有する加工セルが知られている(例えば特許文献1等)。かかる加工セルを用いれば、ワークの搬送や、取り付け、機械加工、後工程等を、連続して自動実行できる。こうした加工セルは、セルコントローラにより制御される。セルコントローラは、加工セルを構成する複数の作業リソースに対して、生産したい物品の品目に応じた指令を出力する。
【先行技術文献】
【特許文献】
【0003】
特開2022-077910号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、こうした加工セルは、様々な要因で異常停止することがある。従来、異常停止が発生した場合、復旧のために必要な作業内容を、オペレータが判断していた。すなわち、異常停止が発生した場合、オペレータは、アラームの内容、および、加工セルに関係する複数の作業要素(例えば加工機やワーク等)の状態を把握する。そして、オペレータは、把握した情報に基づいて、復旧のために必要な作業を特定し、実行する。
【0005】
しかし、作業要素の状態を収集して、復旧作業を特定するために、十分な知識や経験が必要であった。特に、セルコントローラの構成によっては、復旧のために、PLCを直接操作しなければならない場合があった。この場合、PLC言語を熟知した担当者が必要となるため、オペレータが加工セルを容易に復旧できない場合があった。
【0006】
そこで、本明細書では、加工セルが異常停止した際に、オペレータが当該加工セルを容易に復旧できるセルコントローラを開示する。
【課題を解決するための手段】
【0007】
本明細書で開示するセルコントローラは、複数の作業リソースを含む加工セルを制御する前記セルコントローラであって、前記複数の作業リソースは、1以上の加工機と、1以上のロボットと、を含み、セルコントローラは、PLCと、管理装置と、を含み、前記PLCは、前記管理装置からの指示に従って、前記複数の作業リソースの動作を制御するとともに、前記複数の作業リソースとワークを含む複数の作業要素の状態を取得し、前記管理装置は、前記加工セルの異常停止が発生した場合、前記複数の作業要素それぞれの復旧可能状態を特定し、前記複数の作業要素それぞれを前記復旧可能状態に遷移させるための復旧手順のガイドをオペレータに提示する、ことを特徴とする。
【0008】
セルコントローラが、復旧手順を判断してオペレータにガイドを提示することで、オペレータの知識や経験が乏しくても、加工セルを適正に復旧できる。
【0009】
この場合、前記管理装置は、前記複数の作業要素それぞれの前記復旧可能状態をアラーム種類ごとに記録した復旧条件情報と、前記複数の作業要素それぞれの前記復旧手順を前記復旧可能状態ごとに記録した遷移情報と、を予め記憶しており、前記復旧条件情報に基づいて、前記複数の作業要素それぞれの前記復旧可能状態を特定し、前記遷移情報に基づいて、前記復旧手順を特定してもよい。
【0010】
かかる構成とすることで、簡易、かつ、適切に、復旧手順を特定できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
16日前
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
2か月前
株式会社エクセディ
作業ロボット
1か月前
ミネベアミツミ株式会社
入力装置
2か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
トヨタ自動車株式会社
自動走行搬送車
2か月前
エイブリック株式会社
ボルテージレギュレータ
2か月前
三菱電機株式会社
移動体制御装置
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社クボタ
故障診断装置
2か月前
マキノジェイ株式会社
工作機械
15日前
岩田工機株式会社
加工装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
リックス株式会社
状態検出装置
2か月前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
搬送車システム
2か月前
オムロン株式会社
サポート装置およびサポート方法
15日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
村田機械株式会社
無人搬送車システム
28日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
横河電機株式会社
ロボット管理システム
23日前
ローム株式会社
電圧生成回路
13日前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
ペダル装置
15日前
シャープ株式会社
走行システム及び走行方法
1か月前
多摩川精機株式会社
突入電流防止回路
2か月前
オークマ株式会社
工作機械の制御方法及び制御装置
1日前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
株式会社ディスコ
加工装置
2か月前
ローム株式会社
リニアレギュレータ
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ