TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024064572
公報種別
公開特許公報(A)
公開日
2024-05-14
出願番号
2022173260
出願日
2022-10-28
発明の名称
シミュレーションシステム
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240507BHJP(制御;調整)
要約
【課題】仮想空間モデルの作成にかかる工数を削減することができるシミュレーションシステムを提供する。
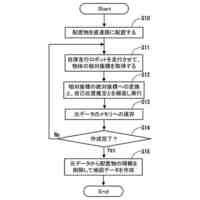
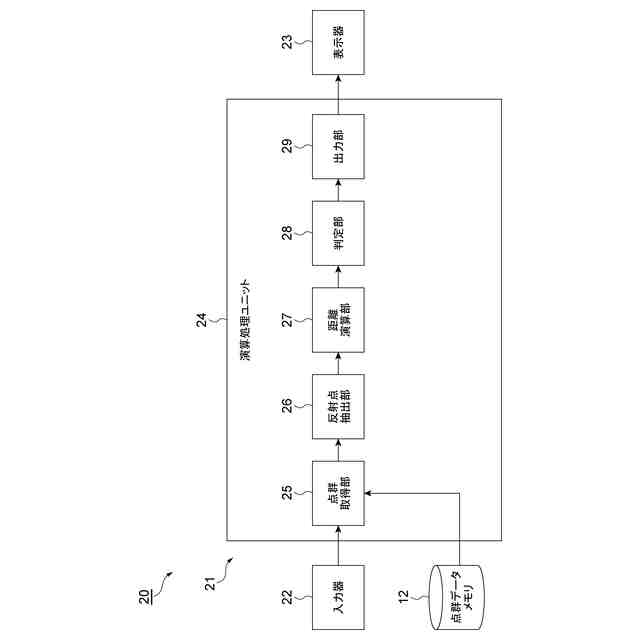
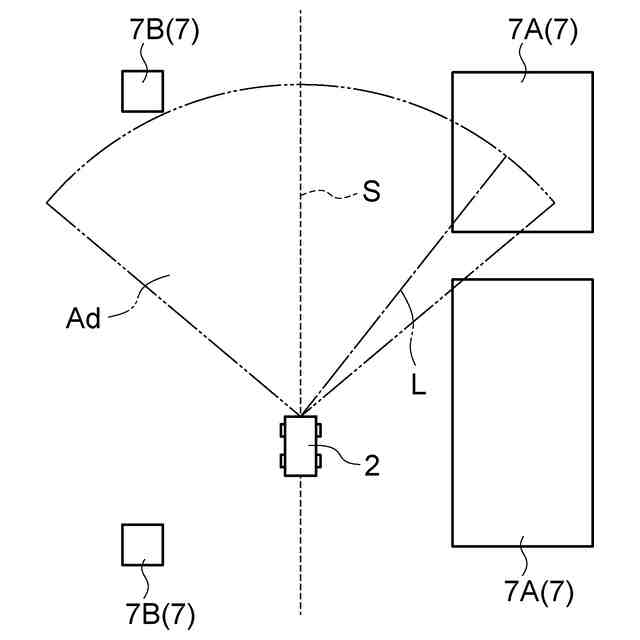
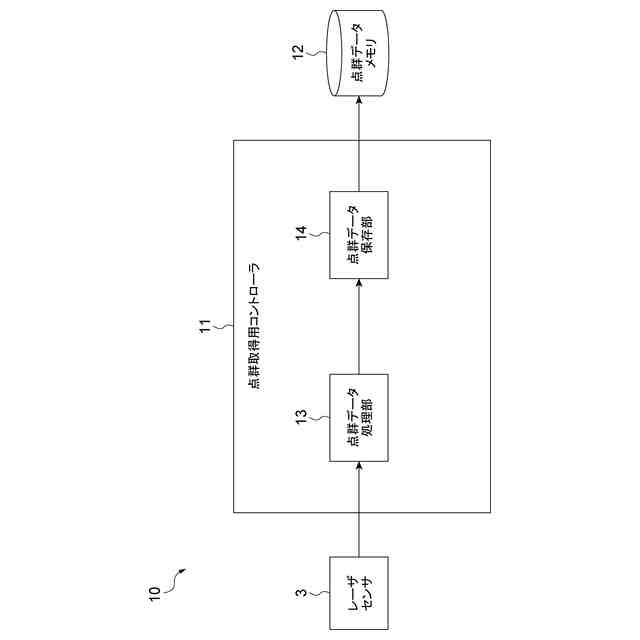
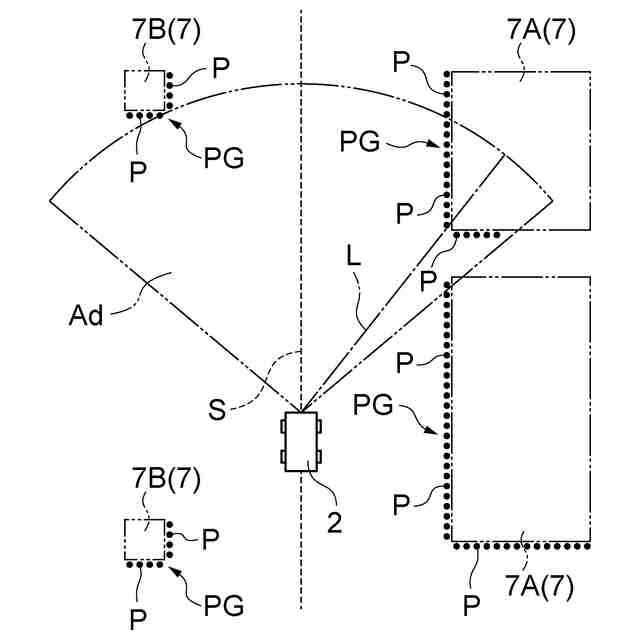
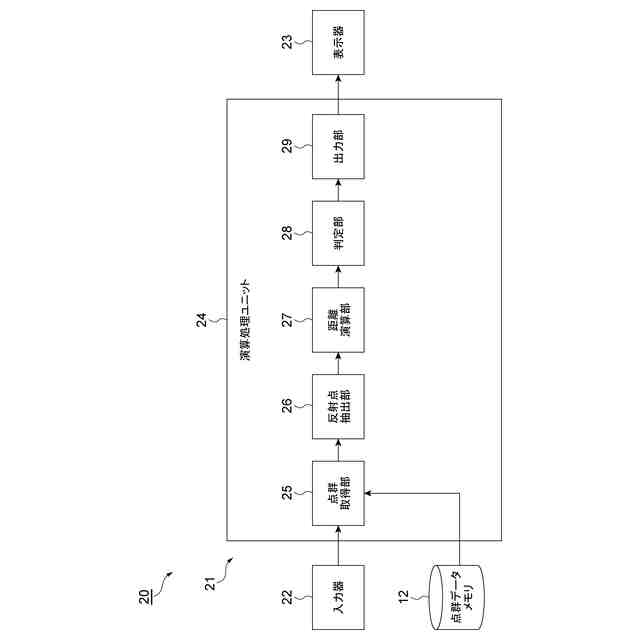
【解決手段】シミュレーションシステム20は、シミュレーション対象の実環境に存在する物体7の点群を構成する複数の反射点Pの位置座標を含む点群データを取得する点群取得部25と、移動体2に対応する仮想移動体2Aを仮想的に走行させながら、レーザセンサ3に対応する仮想レーザセンサ3Aから対象となる点群PGに向けて3次元の規定領域Rsを有する仮想レーザL0を出射したときに、3次元の規定領域Rs内に存在する複数の反射点Pの位置座標を抽出する反射点抽出部26とを備える。
【選択図】図6
特許請求の範囲
【請求項1】
移動体の走行に使用されるセンサのシミュレーションを行うシミュレーションシステムであって、
シミュレーション対象の実環境に存在する物体の点群を構成する複数の反射点の位置座標を含む点群データを取得する点群データ取得部と、
前記移動体に対応する仮想移動体を仮想的に走行させながら、前記センサに対応する仮想センサから対象となる点群に向けて3次元の規定領域を有する仮想信号を出射したときに、前記3次元の規定領域内に存在する複数の反射点の位置座標を抽出する反射点抽出部とを備えるシミュレーションシステム。
続きを表示(約 790 文字)
【請求項2】
前記規定領域は、前記仮想信号の中心線を中心とした領域であり、前記仮想センサからの距離が長くなるに従って前記中心線に垂直に切った面の面積が大きくなるように設定される請求項1記載のシミュレーションシステム。
【請求項3】
前記反射点抽出部により抽出された前記複数の反射点の位置座標に基づいて、前記仮想センサから前記対象となる点群の位置までの距離を演算する距離演算部を更に備える請求項1記載のシミュレーションシステム。
【請求項4】
前記距離演算部は、前記複数の反射点の位置座標の平均値を前記対象となる点群の位置の推定座標として算出し、前記推定座標に基づいて前記仮想センサから前記対象となる点群の位置までの距離を演算する請求項3記載のシミュレーションシステム。
【請求項5】
前記規定領域は、前記仮想信号の中心線を中心とした領域であり、
前記距離演算部は、前記仮想信号の中心線と前記複数の反射点の位置座標との最短距離をそれぞれ算出し、前記中心線と前記反射点の位置座標との最短距離に応じた重み付けを行って、前記仮想センサから前記対象となる点群の位置までの距離を演算する請求項3記載のシミュレーションシステム。
【請求項6】
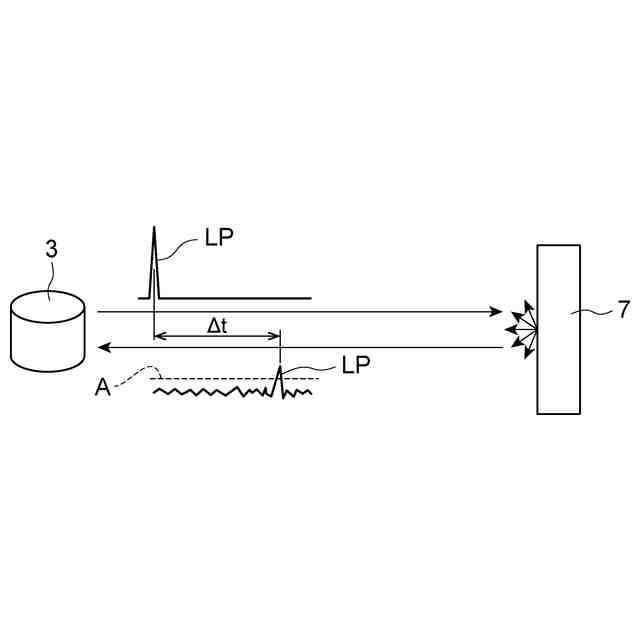
前記点群データは、前記複数の反射点の反射強度を更に含み、
前記距離演算部は、前記複数の反射点の位置座標及び反射強度に基づいて、前記仮想センサから前記対象となる点群の位置までの距離を演算する請求項3記載のシミュレーションシステム。
【請求項7】
前記点群データ取得部により取得された前記複数の反射点の位置座標と前記反射点抽出部により抽出された前記複数の反射点の位置座標とを照合する照合部を更に備える請求項1記載のシミュレーションシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、シミュレーションシステムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば特許文献1には、LiDARセンサの仮想画像を用いて自動車の自動運転走行システムにおける画像認識機能モジュールの機械学習及びテストを行うシミュレーションシステムが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-60512号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、例えば自動走行を行う移動体のシミュレーションには、移動体を仮想的に走行させるための仮想空間モデルが必要である。昨今、乗用車向けの一般道及び都市部の仮想空間モデルの公開が始まってはいるが、フォークリフトやトーイングトラクター等の産業車両が走行する構内(例えば工場内や空港内)の仮想空間モデルとしては、利用可能なものがない。現状では、ユーザの環境を再現するために、ユーザの構内においてLiDAR等の測距センサにより点群データを取得した後、手作業により3DのCGデータを配置することで、仮想空間モデルを作成している。このため、仮想空間モデルの作成にかかる工数が増大する。
【0005】
本発明の目的は、仮想空間モデルの作成にかかる工数を削減することができるシミュレーションシステムを提供することである。
【課題を解決するための手段】
【0006】
(1)本発明の一態様は、移動体の走行に使用されるセンサのシミュレーションを行うシミュレーションシステムであって、シミュレーション対象の実環境に存在する物体の点群を構成する複数の反射点の位置座標を含む点群データを取得する点群データ取得部と、移動体に対応する仮想移動体を仮想的に走行させながら、センサに対応する仮想センサから対象となる点群に向けて3次元の規定領域を有する仮想信号を出射したときに、3次元の規定領域内に存在する複数の反射点の位置座標を抽出する反射点抽出部とを備える。
【0007】
このようなシミュレーションシステムにおいては、まずシミュレーション対象の実環境に存在する物体の点群を構成する複数の反射点の位置座標を含む点群データが取得される。そして、移動体に対応する仮想移動体を仮想的に走行させながら、移動体の走行に使用されるセンサに対応する仮想センサから対象となる点群に向けて3次元の規定領域を有する仮想信号を出射したときに、3次元の規定領域内に存在する複数の反射点の位置座標が抽出される。このようにシミュレーション対象の実環境の点群データをそのまま使用してセンサのシミュレーションが行われるため、手作業により3DのCGデータを配置しなくて済む。これにより、仮想空間モデルの作成にかかる工数が削減される。
【0008】
また、例えば仮想センサから対象となる点群に向けて1次元の仮想信号が出射される場合には、1次元の仮想信号が反射点間を通過することがある。そこで、仮想センサは、3次元の規定領域を有する仮想信号を出射する。そして、仮想センサから仮想信号を出射したときに、3次元の規定領域内に存在する複数の反射点の位置座標が抽出される。このため、仮想信号が何れかの反射点に当たらずに反射点間を通過しても、規定領域内に存在する他の反射点が抽出される。従って、点群データをそのまま使用してシミュレーションを行う場合であっても、3DのCGデータが配置された仮想空間モデルを使用してシミュレーションを行う場合と同様に、複数の反射点の位置座標を抽出することが可能となる。
【0009】
(2)上記の(1)において、規定領域は、仮想信号の中心線を中心とした領域であり、仮想センサからの距離が長くなるに従って中心線に垂直に切った面の面積が大きくなるように設定されてもよい。このような構成では、点群が仮想センサから遠く離れても、規定領域内に複数の反射点が存在するようになるため、その後の処理に使用される反射点が十分に確保される。
【0010】
(3)上記の(1)または(2)において、シミュレーションシステムは、反射点抽出部により抽出された複数の反射点の位置座標に基づいて、仮想センサから対象となる点群の位置までの距離を演算する距離演算部を更に備えてもよい。このような構成では、仮想センサから対象となる点群の位置までの距離を演算することにより、仮想移動体の自己位置推定精度の判定及び仮想移動体の周囲に存在する障害物の検知精度の判定を容易に行うことができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
19日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
2か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
株式会社ダイフク
搬送設備
1か月前
三菱電機株式会社
移動体制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
マキノジェイ株式会社
工作機械
18日前
岩田工機株式会社
加工装置
1か月前
村田機械株式会社
搬送車システム
2か月前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
無人搬送車システム
1か月前
オムロン株式会社
サポート装置およびサポート方法
18日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
電圧生成回路
16日前
横河電機株式会社
ロボット管理システム
26日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
ペダル装置
18日前
シャープ株式会社
走行システム及び走行方法
1か月前
多摩川精機株式会社
突入電流防止回路
2か月前
オークマ株式会社
工作機械の制御方法及び制御装置
4日前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
株式会社ディスコ
加工装置
2か月前
ローム株式会社
リニアレギュレータ
1か月前
丸北研磨株式会社
稼働状況管理システム
2日前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
11日前
アマノ株式会社
自律走行装置およびその妥当性評価方法
24日前
シンフォニアテクノロジー株式会社
地図作成方法
1か月前
株式会社日立製作所
制御装置
1か月前
川崎重工業株式会社
制御システム、制御方法及び制御プログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ