TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024054509
公報種別
公開特許公報(A)
公開日
2024-04-17
出願番号
2022160761
出願日
2022-10-05
発明の名称
シミュレーションシステム
出願人
パナソニックIPマネジメント株式会社
代理人
個人
,
個人
,
個人
主分類
G05B
19/418 20060101AFI20240410BHJP(制御;調整)
要約
【課題】シミュレーションを効率よく行えるシミュレーションシステムを提供する。
【解決手段】シミュレーションシステム10は、第1シミュレータ20と、第2シミュレータ30とを備え、第1シミュレータ20は、第2シミュレータ30が用いるシミュレーションモデルよりも抽象化されたシミュレーションモデルを用いて、プロセスのシミュレーションを行い、以下の(1)および(2)の少なくとも一方を満たす、(1)第1シミュレータ20は、第2シミュレータ30によって行われたシミュレーションに基づいて得られた第2シミュレーション情報を取得し、第2シミュレーション情報を用いてプロセスのシミュレーションを行う、(2)第2シミュレータ30は、第1シミュレータ20によって行われたシミュレーションに基づいて得られた第1シミュレーション情報を取得し、第1シミュレーション情報を用いてプロセスのシミュレーションを行う。
【選択図】図1
特許請求の範囲
【請求項1】
複数の単位工程を含むプロセスのシミュレーションを行う第1シミュレータと、
前記プロセスのシミュレーションを前記プロセスで用いられる機器に関する機器情報に基づいて行う第2シミュレータとを備え、
前記第1シミュレータは、前記第2シミュレータが用いるシミュレーションモデルよりも抽象化されたシミュレーションモデルを用いて、前記プロセスのシミュレーションを行い、
以下の(1)および(2)の少なくとも一方を満たす、
(1)前記第1シミュレータは、前記第2シミュレータによって行われたシミュレーションに基づいて得られた第2シミュレーション情報を取得し、前記第2シミュレーション情報を用いて前記プロセスのシミュレーションを行う、
(2)前記第2シミュレータは、前記第1シミュレータによって行われたシミュレーションに基づいて得られた第1シミュレーション情報を取得し、前記第1シミュレーション情報を用いて前記プロセスのシミュレーションを行う、
シミュレーションシステム。
続きを表示(約 950 文字)
【請求項2】
前記第1シミュレータは、相互に異なる複数の前提条件で前記プロセスのシミュレーションを行い、
前記第2シミュレータは、最適な前提条件で前記プロセスのシミュレーションを行う、
請求項1に記載のシミュレーションシステム。
【請求項3】
前記複数の単位工程は、原材料または中間生成物の加工を行う加工工程と、前記原材料、前記中間生成物、加工補助具、生産物、または廃棄物の搬送を行う搬送工程とを含む、
請求項2に記載のシミュレーションシステム。
【請求項4】
複数の前記機器は、前記加工工程で用いられる加工機と、前記搬送工程で用いられる搬送機とを含む、
請求項3に記載のシミュレーションシステム。
【請求項5】
前記複数の前提条件は、前記加工機のレイアウト、前記搬送機の搬送経路、および前記搬送機の搬送順序の少なくとも1つが相互に異なる、
請求項4に記載のシミュレーションシステム。
【請求項6】
前記(2)を満たし、
前記第1シミュレータは、前記複数の前提条件で前記プロセスのシミュレーションを行って深層学習を実行し、前記最適な前提条件を予測し、
前記第1シミュレーション情報は、前記第1シミュレータによって予測された前記最適な前提条件を含む、
請求項2から5のいずれか1項に記載のシミュレーションシステム。
【請求項7】
前記機器情報は、前記機器の稼働状況を示す稼働情報、または前記機器の設計情報である、
請求項1から5のいずれか1項に記載のシミュレーションシステム。
【請求項8】
前記(1)を満たし、
前記第2シミュレーション情報は、前記プロセスのシミュレーションに用いられるパラメータを含む、
請求項1から5のいずれか1項に記載のシミュレーションシステム。
【請求項9】
前記第2シミュレータは、相互に異なる複数の前記パラメータを用いて前記プロセスのシミュレーションを行って深層学習を実行し、最適な前記パラメータを予測する、
請求項8に記載のシミュレーションシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、シミュレーションシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、シミュレーションを行うシミュレーションシステムが知られている。シミュレーションシステムの一例として、特許文献1には、荷物の搬送シミュレーションを実行するシミュレーションシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-084080号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、シミュレーションを効率よく行うことが望まれている。
【0005】
そこで、本開示は、シミュレーションを効率よく行えるシミュレーションシステムを提供する。
【課題を解決するための手段】
【0006】
本開示の一態様に係るシミュレーションシステムは、複数の単位工程を含むプロセスのシミュレーションを行う第1シミュレータと、前記プロセスのシミュレーションを前記プロセスで用いられる機器に関する機器情報に基づいて行う第2シミュレータとを備え、前記第1シミュレータは、前記第2シミュレータが用いるシミュレーションモデルよりも抽象化されたシミュレーションモデルを用いて、前記プロセスのシミュレーションを行い、以下の(1)および(2)の少なくとも一方を満たす、(1)前記第1シミュレータは、前記第2シミュレータによって行われたシミュレーションに基づいて得られた第2シミュレーション情報を取得し、前記第2シミュレーション情報を用いて前記プロセスのシミュレーションを行う、(2)前記第2シミュレータは、前記第1シミュレータによって行われたシミュレーションに基づいて得られた第1シミュレーション情報を取得し、前記第1シミュレーション情報を用いて前記プロセスのシミュレーションを行う。
【0007】
なお、これらの包括的または具体的な態様は、システム、方法、集積回路、コンピュータプログラムまたはコンピュータ読み取り可能なCD-ROM等の記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラムおよび記録媒体の任意な組み合わせで実現されてもよい。また、記録媒体は、非一時的な記録媒体であってもよい。
【発明の効果】
【0008】
本開示のシミュレーションシステムは、シミュレーションを効率よく行える。
【0009】
なお、本開示の一態様における更なる利点および効果は、明細書および図面から明らかにされる。かかる利点および/または効果は、いくつかの実施の形態ならびに明細書および図面に記載された特徴によってそれぞれ提供されるが、1つまたはそれ以上の同一の特徴を得るために必ずしも全てが提供される必要はない。
【図面の簡単な説明】
【0010】
図1は、実施の形態1に係るシミュレーションシステムの機能構成を示すブロック図である。
図2は、プロセスの一例を示す模式図である。
図3は、図1のシミュレーションシステムの動作の一例を示すシーケンス図である。
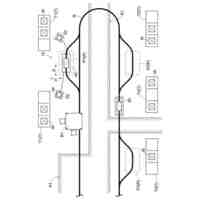
図4は、図1のシミュレーションシステムの適用対象の一例である作業ラインを示す斜視図である。
図5は、図4の作業ラインのレイアウトの一例を示す模式図である。
図6は、図4の作業ラインの作業プロセスフローの一例を示す要部ブロック図である。
図7は、図4の作業ラインのレイアウト変更の一例を示す模式図である。
図8は、図1のシミュレーションシステムに適用される深層学習の一例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
3日前
アズビル株式会社
流量制御装置
1か月前
株式会社エクセディ
作業ロボット
16日前
ミネベアミツミ株式会社
入力装置
28日前
トヨタ自動車株式会社
自動走行搬送車
1か月前
オムロン株式会社
開発装置、開発方法
1日前
三菱電機株式会社
移動体制御装置
15日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社ダイフク
搬送設備
6日前
株式会社クボタ
故障診断装置
1か月前
岩田工機株式会社
加工装置
15日前
リックス株式会社
状態検出装置
1か月前
株式会社デンソー
制御装置
1か月前
株式会社ダイフク
物品搬送設備
3日前
株式会社デンソー
制御装置
1か月前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
21日前
株式会社GSユアサ
電力変換装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
過電流検出回路
2日前
THK株式会社
編集装置及び編集方法
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
9日前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
1か月前
村田機械株式会社
走行車システム
1か月前
日本精工株式会社
制御システムおよび制御方法
9日前
日本精工株式会社
制御システムおよび制御方法
9日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
日本精工株式会社
制御システムおよび制御方法
9日前
日本精工株式会社
制御システムおよび制御方法
9日前
株式会社デンソー
ペダル装置
1か月前
シャープ株式会社
走行システム及び走行方法
1日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
多摩川精機株式会社
突入電流防止回路
21日前
株式会社ダイフク
無人航空機の搬送システム
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ