TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024103460
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2024005432
出願日
2024-01-17
発明の名称
無人搬送システム
出願人
エンゼルグループ株式会社
代理人
個人
,
個人
主分類
G05D
1/249 20240101AFI20240725BHJP(制御;調整)
要約
【課題】指定された動線上を走行することを前提として、目的地に向けて重量物を搬送するための新規の無人搬送システムを提供する。
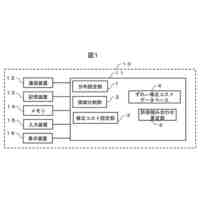
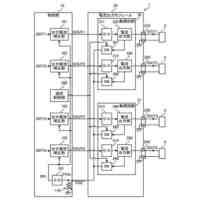
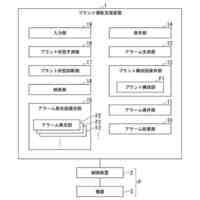
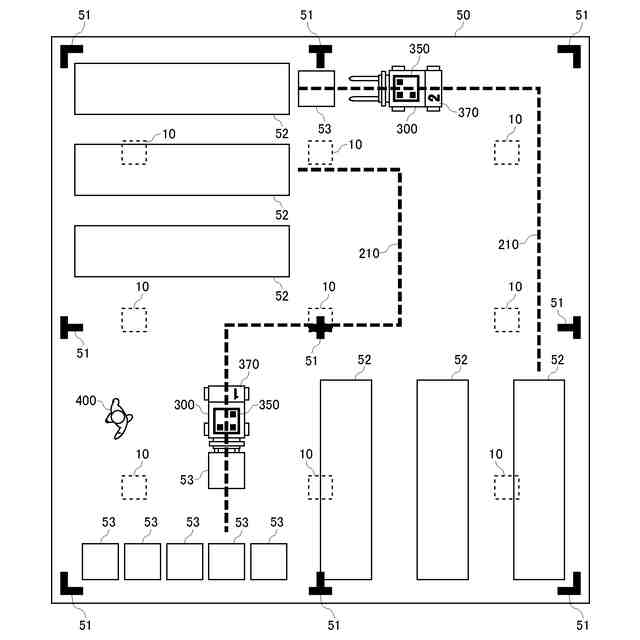
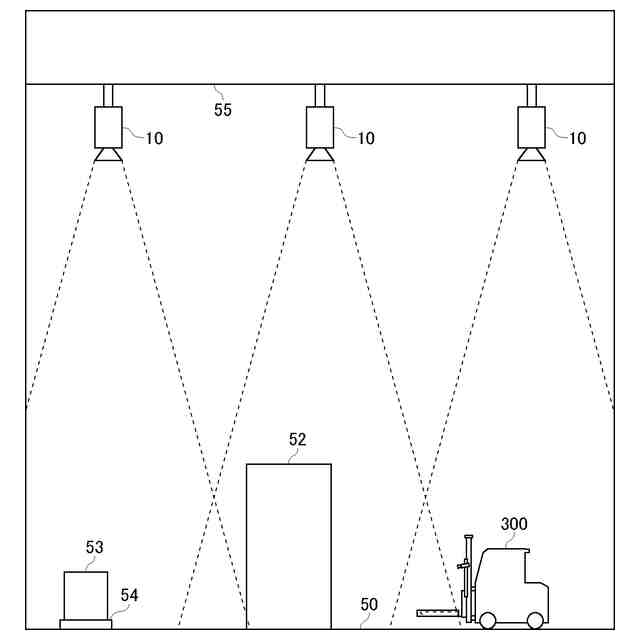
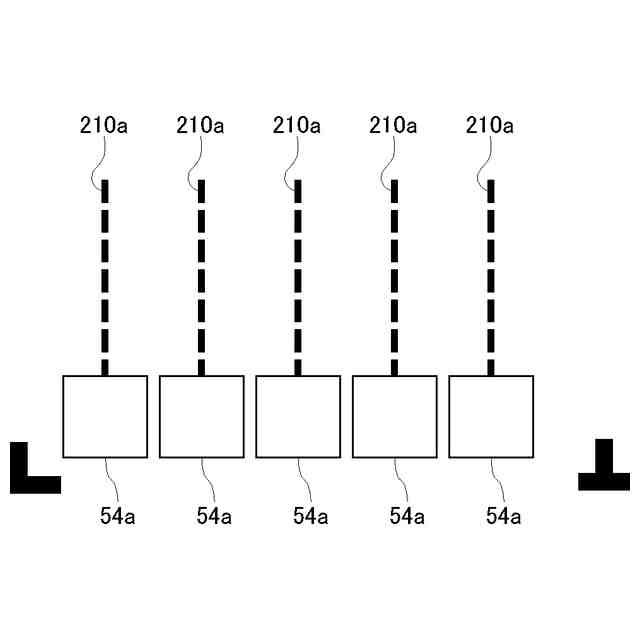
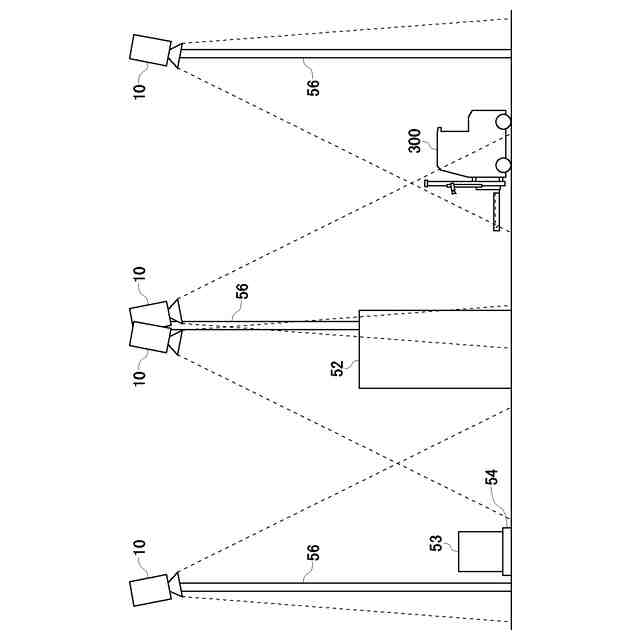
【解決手段】指定目的地に向けて、指定された仮想の動線の上を走行する無人搬送システム100であって、制御信号に従って無人で走行する無人搬送車300と、フィールドを、上方から撮影して静止画像又は動画像を生成する1又は複数のカメラ10と、静止画像又は動画像に基づいて、無人搬送車300が仮想の動線上を走行するように制御するための制御信号を生成する運転制御手段20とを備えている。運転制御手段20は、静止画像又は動画像から無人搬送車300を検出する検出部21と、検出部21による検出の結果を用いて無人搬送車300のフィールドにおける位置を把握する位置把握部22と、位置把握部22が把握した無人搬送車300の位置に基づいて、制御信号を生成する制御部24とを備えている。
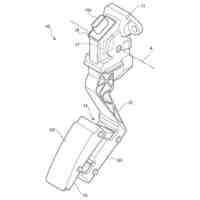
【選択図】図4
特許請求の範囲
【請求項1】
指定された目的地に向けて、指定された仮想の動線の上を走行して、重量物を搬送する無人搬送システムであって、
制御信号に従って無人で走行する無人搬送車と、
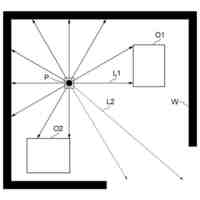
前記無人搬送車が走行するフィールドを、前記フィールドの上方から撮影して静止画像又は動画像を生成する1又は複数のカメラと、
前記静止画像又は動画像に基づいて、前記無人搬送車が前記仮想の動線上を走行するように制御するための前記制御信号を生成する運転制御手段と、
を備え、
前記運転制御手段は、
前記静止画像又は動画像から前記無人搬送車を検出する検出部と、
前記検出部による検出の結果を用いて、前記無人搬送車に搭載されたセンサによらずに、前記無人搬送車の前記フィールドにおける位置を把握する位置把握部と、
前記位置把握部が把握した前記無人搬送車の位置に基づいて、前記制御信号を生成する制御部と、
を備えた、無人搬送システム。
続きを表示(約 1,100 文字)
【請求項2】
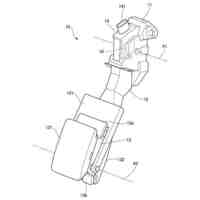
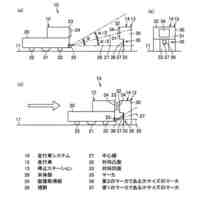
前記無人搬送車は、パレットに置かれた前記重量物をパレットごと持ち上げて搬送するフォークリフト車である、請求項1に記載の無人搬送システム。
【請求項3】
前記フィールドは屋内にあり、
前記1又は複数のカメラは、天井又は壁に取り付けられて、前記フィールドを上方から撮影する、請求項1に記載の無人搬送システム。
【請求項4】
前記フィールドは屋外にあり、
前記1又は複数のカメラは、屋外に設置された構造物に取り付けられて、前記フィールドを上方から撮影する、請求項1に記載の無人搬送システム。
【請求項5】
前記運転制御手段は、さらに、前記静止画像又は動画像に基づいて前記無人搬送車の向きを把握する向き把握部を備え、
前記制御部は、前記向き把握部が把握した向きにも基づいて、前記制御信号を生成する、請求項1に記載の無人搬送システム。
【請求項6】
前記無人搬送車は、前記目的地において前記重量物の荷積み又は荷下ろしのための自律運転を行う、請求項1に記載の無人搬送システム。
【請求項7】
前記運転制御手段の前記検出部は、さらに、前記静止画像又は動画像から障害物を検出し、
前記運転制御手段の前記制御部は、さらに、前記検出部による前記検出の結果にも基づいて、前記制御信号を生成する、請求項1に記載の無人搬送システム。
【請求項8】
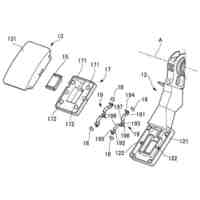
前記無人搬送車は、前記動線上の走行を開始するためにユーザが操作をするための操作部を備え、
前記運転制御手段の前記制御部は、前記操作部に対する前記操作に応じて前記制御信号の生成を開始する、請求項1に記載の無人搬送システム。
【請求項9】
前記目的地及び前記仮想の動線がそれぞれ指定された複数の前記無人搬送車を備え、
前記運転制御手段の前記検出部は、前記静止画像又は動画像から複数の前記無人搬送車を検出し、
前記運転制御手段の前記位置把握部は、複数の前記無人搬送車の前記フィールドにおけるそれぞれの位置を把握し、
前記運転制御手段の前記制御部は、前記位置把握部が把握した複数の位置に基づいて、複数の前記無人搬送車の各々の前記制御信号を生成する、請求項1に記載の無人搬送システム。
【請求項10】
視野が異なる複数の前記カメラを備え、
前記位置把握部は、前記複数のカメラで生成された複数の静止画像又は動画像を統合することで、前記無人搬送車の前記フィールドにおける位置を把握する、請求項1に記載の無人搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、指定された目的地に向けて、指定された動線の上を走行して、重量物を搬送する無人搬送システム(即ち、自動誘導システム)に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来より、工場や倉庫などの所定のフィールドにおいて、重量物を搬送するのに無人搬送車(即ち、自動誘導車、AGV)が使用されている。従来の無人搬送システムでは、フィールドに無人搬送車が走行すべき動線(又は、経路ないしルート)がテープ等で指定されている。無人搬送車は、このテープを検出しながら、テープに沿って走行することで、指定された動線上を走行して重量物をフィールド内の目的地に搬送する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
フィールドにおいて、目的地を変更する必要がある場合がある。この場合には、動線も変更することになる。しかしながら、動線を変更する場合には、フィールド上に設置したテープを設置しなおす必要があり、その負担は大きい。
【0004】
特に、無人搬送車がパレットに乗せられた重量物をパレットごと搬送するフォークリフトである場合には、パレットの大きさが変更されることで、保管しておく重量物の間隔が変更されるため、目的地にずれが生じ、そのような目的地の変更は頻繁に行われる。したがって、パレットの大きさを変更するたびに動線となるテープ等を設置しなおす負担は極めて大きくなる。
【0005】
なお、無人搬送車には、指定された動線上を走行するのではなく、周辺環境(障害物等)をセンシングによって把握することで、自律運転を行いつつ目的地を目指すよう走行する自律走行の搬送車もある。しかしながら、工場や倉庫のように人も行きかうフィールド内において、重量物を搬送している無人搬送車が自由に経路を走行できるとすると危険である。
【0006】
そこで、本発明は、指定された動線上を走行することを前提として、目的地に向けて重量物を搬送するための新規の無人搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様の無人搬送システムは、指定された目的地に向けて、指定された仮想の動線の上を走行して、重量物を搬送する無人搬送システムであって、制御信号に従って無人で走行する無人搬送車と、前記無人搬送車が走行するフィールドを、前記フィールドの上方から撮影して静止画像又は動画像を生成する1又は複数のカメラと、前記静止画像又は動画像に基づいて、前記無人搬送車が前記仮想の動線上を走行するように制御するための前記制御信号を生成する運転制御手段とを備え、前記運転制御手段は、前記静止画像又は動画像から前記無人搬送車を検出する検出部と、前記検出部による検出の結果を用いて、前記無人搬送車に搭載されたセンサによらずに、前記無人搬送車の前記フィールドにおける位置を把握する位置把握部と、前記位置把握部が把握した前記無人搬送車の位置に基づいて、前記制御信号を生成する制御部とを備えた構成を有している。
【0008】
上記の無人搬送システムにおいて、前記無人搬送車は、パレットに置かれた前記重量物をパレットごと持ち上げて搬送するフォークリフト車であってよい。
【0009】
上記の無人搬送システムにおいて、前記フィールドは屋内にあってよく、前記1又は複数のカメラは、天井又は壁に取り付けられて、前記フィールドを上方から撮影してよい。
【0010】
上記の無人搬送システムにおいて、前記フィールドは屋外にあってよく、前記1又は複数のカメラは、屋外に設置された構造物に取り付けられて、前記フィールドを上方から撮影してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
8日前
株式会社ダイヘン
移動体
13日前
ローム株式会社
半導体集積回路
23日前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
1か月前
三栄ハイテックス株式会社
基準電圧回路
26日前
株式会社ダイフク
搬送設備
8日前
株式会社鷺宮製作所
制御装置
7日前
株式会社オプトン
制御プログラム生成装置
6日前
株式会社ダイヘン
負荷時タップ切換器
13日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
22日前
株式会社ダイフク
物品搬送設備
6日前
株式会社ダイフク
物品搬送設備
6日前
株式会社戸張空調
アクセル・ブレーキ操作装置
19日前
株式会社計数技研
移動体、及びプログラム
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
6日前
オムロン株式会社
安全装置
6日前
株式会社ダイヘン
搬送車
1か月前
ローム株式会社
半導体装置
29日前
株式会社日立製作所
製造工程管理システム
7日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社豊田自動織機
無人搬送車両
16日前
株式会社FUJI
工作機械
9日前
株式会社大林組
作業機械の自動運転制御システム
22日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
23日前
オークラ輸送機株式会社
走行車および自律走行方法
29日前
株式会社東海理化電機製作所
ペダル装置
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
横河電機株式会社
電流出力装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
横河電機株式会社
プラント運転支援装置
7日前
オークラ輸送機株式会社
走行車および走行車システム
29日前
豊田鉄工株式会社
車両用操作ペダル
20日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ