TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024093157
公報種別
公開特許公報(A)
公開日
2024-07-09
出願番号
2022209351
出願日
2022-12-27
発明の名称
自立走行農作業車
出願人
井関農機株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20240702BHJP(制御;調整)
要約
【課題】本発明は、自立走行農作業車で、農道や圃場に障害物があるとその障害物の種類と障害の程度を判断して、安全に対応して農作業を出来るだけ継続できるようにすることを課題とする。
【解決手段】機体1の前方に向かって路面及び周囲の前景映像を写す撮影装置9と対象物との距離を測る距離計測装置8を設け、撮影装置9と距離計測手段8で入手した機体前情報を制御装置20に取り込んで、前景映像に機体シルエット15を描いてその機体シルエット15内或いは極近くに在る対象物が草木であってさらに機体シルエット15内侵入が僅かであれば走行速度を落として走行し、障害物が草木以外であれば障害物の直前に停止することを特徴とする自立走行農作業車とする。
【選択図】図3
特許請求の範囲
【請求項1】
機体(1)の前方に向かって路面及び周囲の景色を写す撮影装置(9)と対象物との距離を測る距離計測装置(8)を設け、撮影装置(9)と距離計測手段(8)で入手した機体前情報を制御装置(20)に取り込んで、前景映像に機体シルエット(15)を描いてその機体シルエット(15)内或いは極近くに在る対象物が草木であってさらに機体シルエット(15)内侵入が僅かであれば走行速度を落として走行し、障害物が草木以外であれば障害物の直前に停止することを特徴とする自立走行農作業車。
続きを表示(約 150 文字)
【請求項2】
自走する機体(1)を管理する携帯端末(12)を設け、制御装置(20)は、撮影装置(9)が写した前景映像に農道や圃場の陥没(17)や土砂崩れ等の通行不可状況が含まれる場合は、走行を直ちに停止して携帯端末(12)に警報と前景映像を送信することを特徴とする自立走行農作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動制御で自立走行して農作業を行う自立走行農作業車に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
自立走行農作業車として、国際公開第2016/129671号に記載された、測位装置で地図上の機体位置を認識しながら設定された圃場の作業コースを走行して耕耘作業を行うトラクタがある。
【先行技術文献】
【特許文献】
【0003】
国際公開第2016/129671号
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記の自立走行農作業車は、測位装置で機体位置を確認しながら事前に設定した圃場の作業コースに順って走行して作業を行うが、圃場の一部が崩壊していたり樹木の枝が圃場に伸びていたりした変化があると、走行が出来なくなって立ち往生することになる。
【0005】
本発明は、自立走行農作業車で、農道や圃場に障害物があるとその障害物の種類と障害の程度を判断して、安全に対応して農作業を出来るだけ継続できるようにすることを課題とする。
【課題を解決するための手段】
【0006】
上記本発明の課題は、次の技術手段により解決される。
【0007】
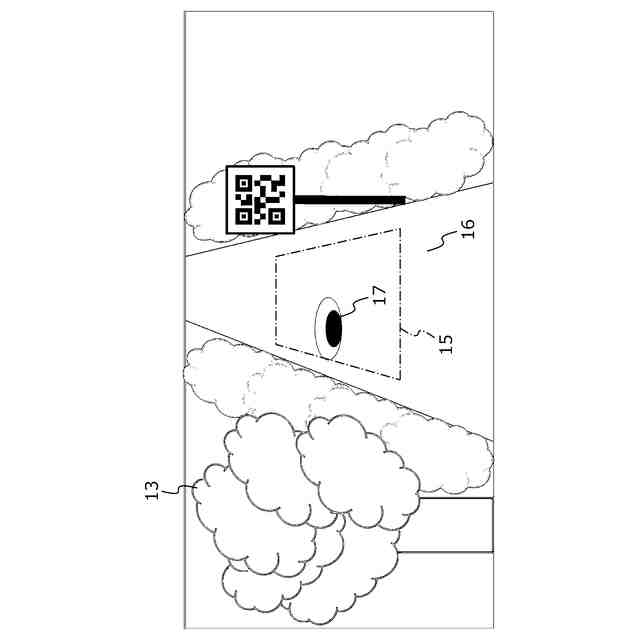
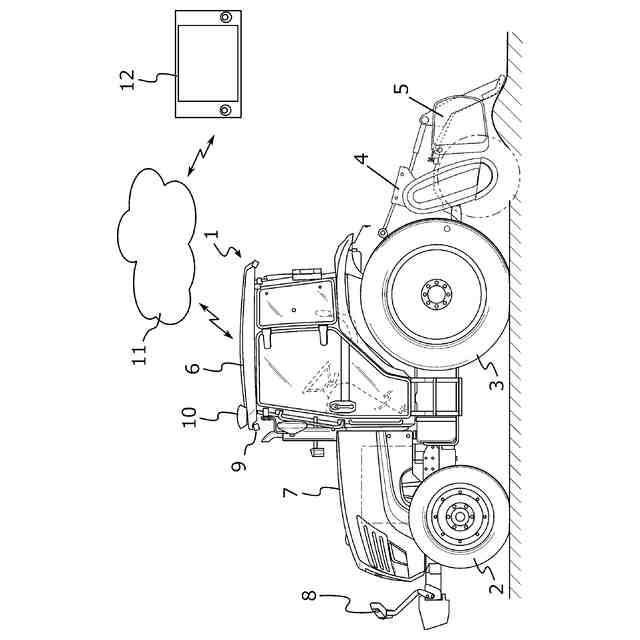
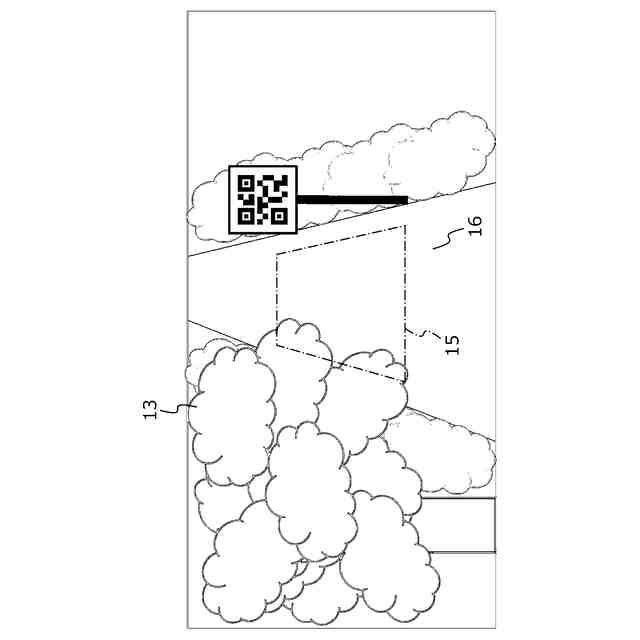
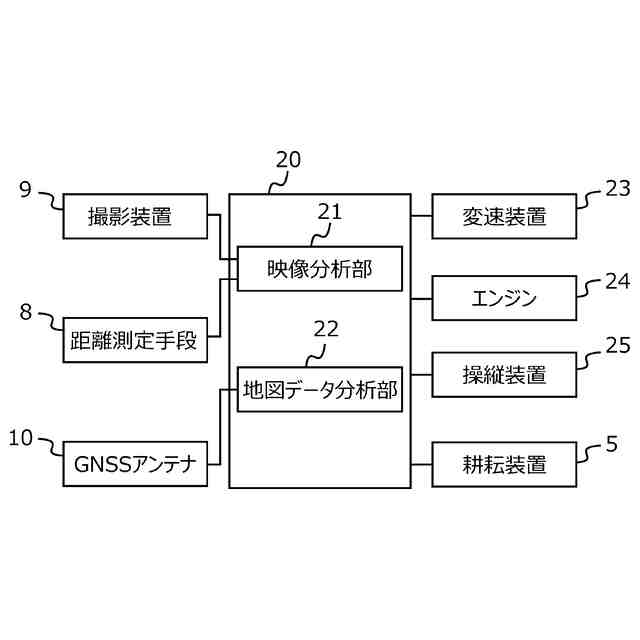
請求項1の発明は、機体1の前方に向かって路面及び周囲の前景を写す撮影装置9と対象物との距離を測る距離計測手段8を設け、撮影装置9と距離計測手段8で入手した機体前情報を制御装置20に取り込んで、前景映像に機体シルエット15を描いてその機体シルエット15内或いは極近くに在る対象物が草木であってさらに機体シルエット15内侵入が僅かであれば走行速度を落として走行し、障害物が草木以外であれば障害物の直前に停止することを特徴とする自立走行農作業車とする。
【0008】
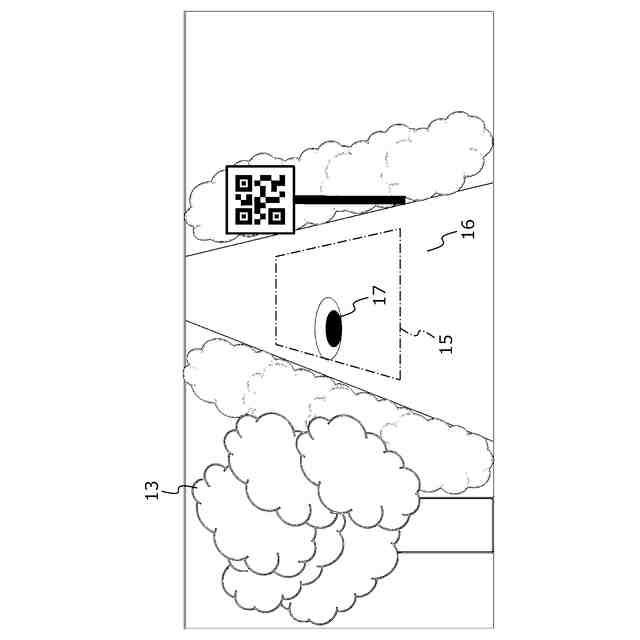
請求項2の発明は、自走する機体1を管理する携帯端末12を設け、制御装置(20)は、撮影装置9が写した前景映像に農道や圃場の陥没孔17や土砂崩れ等の通行不可状況が含まれる場合は、直ちに停止して携帯端末12に警報と前景映像を送信することを特徴とする自立走行農作業車とする。
【発明の効果】
【0009】
請求項1の発明で、撮影装置9は機体1の前方風景を前景映像として写し対象物との距離を距離計測手段8で計測するので、制御装置20で前景映像に映る対象物が草木で機体シルエット15内の障害部分が僅かであれば機体1が損傷する虞が無いので、速度を落として走行しながら作業を継続するので、不慮の障害物による作業中断がなく、作業効率が向上する。
【0010】
請求項2の発明で、自立走行農作業車の走行中に農道や圃場に陥没孔17や土砂崩れを発見すると、管理者が持っている携帯端末12に警報と前景映像を送るので、管理者は警報の内容を知って圃場や農道を補修するに必要な機材を持って、停止した機体1に駆けつけることが出来て、不慮の障害物による農作業の中断に素早く対処出来る。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
ロボット作業車両
今日
個人
方向検出器
1か月前
積水樹脂株式会社
磁性シート
2か月前
ugo株式会社
移動体
1か月前
個人
車両レバー操作装置
2か月前
エイブリック株式会社
基準電圧回路
3か月前
神港テクノス株式会社
制御装置
1か月前
アズビル株式会社
設定システム
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
移動体
1か月前
エイブリック株式会社
基準電圧回路装置
3か月前
トヨタ自動車株式会社
自律移動体
1か月前
トヨタ自動車株式会社
搬送ロボット
2か月前
トヨタ自動車株式会社
配送システム
1か月前
トヨタ自動車株式会社
搬送システム
2か月前
株式会社熊谷組
巡回ルート作成装置
3か月前
アズビル株式会社
パラメータ調整装置
7日前
株式会社ダイヘン
電力変換装置
3か月前
株式会社ダイヘン
電力変換装置
3か月前
株式会社フジキン
流体制御装置
1か月前
トヨタ自動車株式会社
ロボットシステム
6日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
自律移動システム
1か月前
トヨタ自動車株式会社
位置推定システム
1か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社栗本鐵工所
操作装置
2か月前
株式会社FUJI
工作機械の操作システム
2か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
29日前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン株式会社
情報処理装置
6日前
株式会社FUJI
作業機の操作表示システム
3か月前
ローム株式会社
電源回路
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ