TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024094628
公報種別
公開特許公報(A)
公開日
2024-07-10
出願番号
2022211294
出願日
2022-12-28
発明の名称
移動システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20240703BHJP(制御;調整)
要約
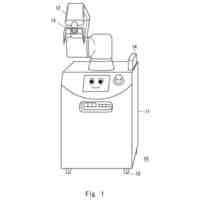
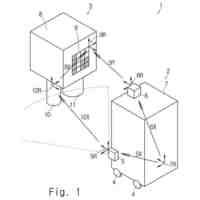
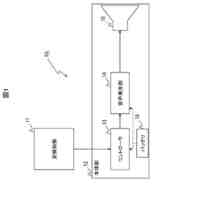
【課題】少ない台数のカメラを用いて、移動ロボットの周辺環境を効率よく観察することが可能な移動システムを提供すること。
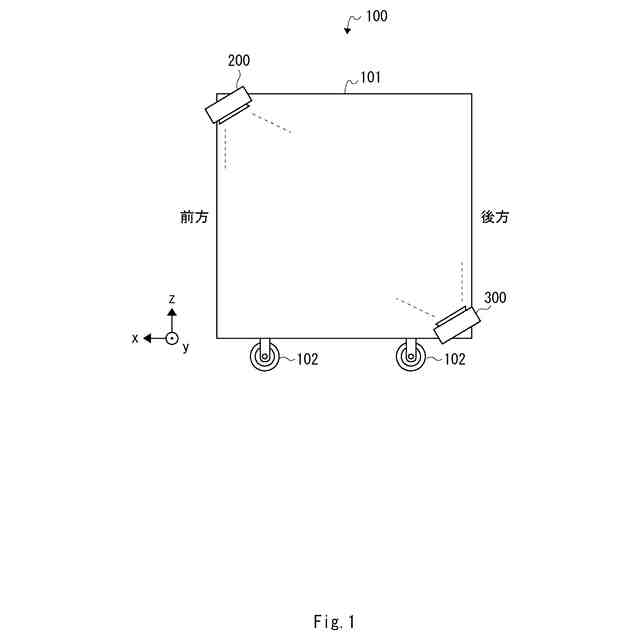
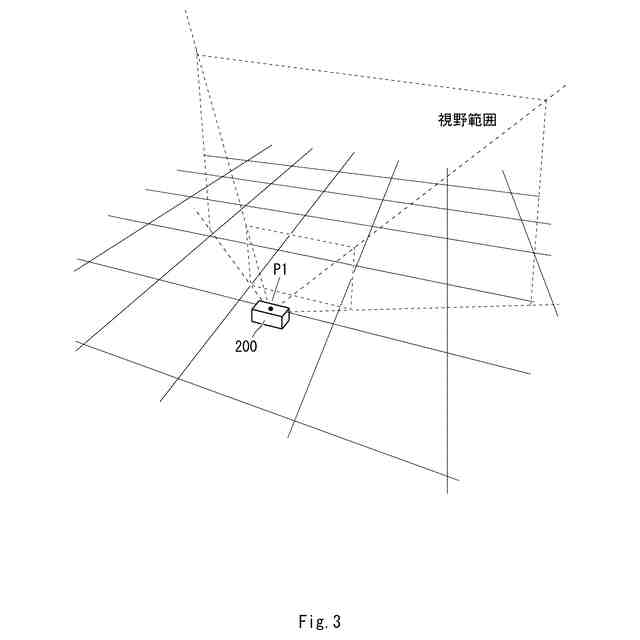
【解決手段】本開示に係る移動システムは、移動ロボットと、移動ロボットの筐体の側面の領域のうち、上方、且つ、前方及び後方の一方、の領域である第1所定領域に設置された第1カメラと、移動ロボットの筐体の側面の領域のうち、下方、且つ、前方及び後方の他方、の領域である第2所定領域に設置された第2カメラと、を備え、第1カメラは、当該第1カメラの視点を頂点とする四角錐状の視野範囲の何れかの側面が、移動ロボットの筐体の側面に実質的に接するように、第1所定領域から下方に向いて設置され、且つ、第2カメラは、当該第2カメラの視点を頂点とする四角錐状の視野範囲の何れかの側面が、移動ロボットの筐体の側面に実質的に接するように、第2所定領域から上方に向いて設置されている。
【選択図】図1
特許請求の範囲
【請求項1】
移動ロボットと、
前記移動ロボットの筐体の側面の領域のうち、上方、且つ、前方及び後方の一方、の領域である第1所定領域に設置された第1カメラと、
前記移動ロボットの筐体の側面の領域のうち、下方、且つ、前方及び後方の他方、の領域である第2所定領域に設置された第2カメラと、
を備え、
前記第1カメラは、当該第1カメラの視点を頂点とする四角錐状の視野範囲の何れかの側面が、前記移動ロボットの筐体の前記側面に実質的に接するように、前記第1所定領域から下方に向いて設置され、且つ、
前記第2カメラは、当該第2カメラの視点を頂点とする四角錐状の視野範囲の何れかの側面が、前記移動ロボットの筐体の前記側面に実質的に接するように、前記第2所定領域から上方に向いて設置されている、
移動システム。
続きを表示(約 1,400 文字)
【請求項2】
前記移動ロボットの筐体は直方体形状であって、
前記第1所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、上方、且つ、前方及び後方の一方、の角部の領域であって、
前記第2所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、下方、且つ、前方及び後方の他方、の角部の領域である、
請求項1に記載の移動システム。
【請求項3】
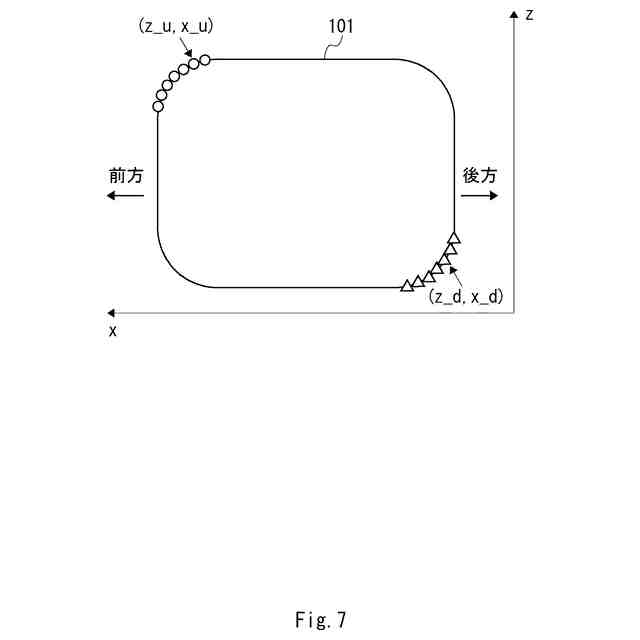
前記移動ロボットの筐体は、角部が丸みを帯びた直方体形状であって、
前記第1所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、上方、且つ、前方及び後方の一方、の角部の領域であって、
前記第2所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、下方、且つ、前方及び後方の他方、の角部の領域である、
請求項1に記載の移動システム。
【請求項4】
前記第1所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、上方、且つ、前方、の領域であって、
前記第2所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、下方、且つ、後方、の領域であって、
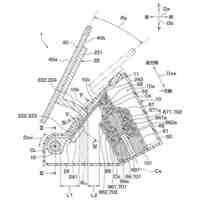
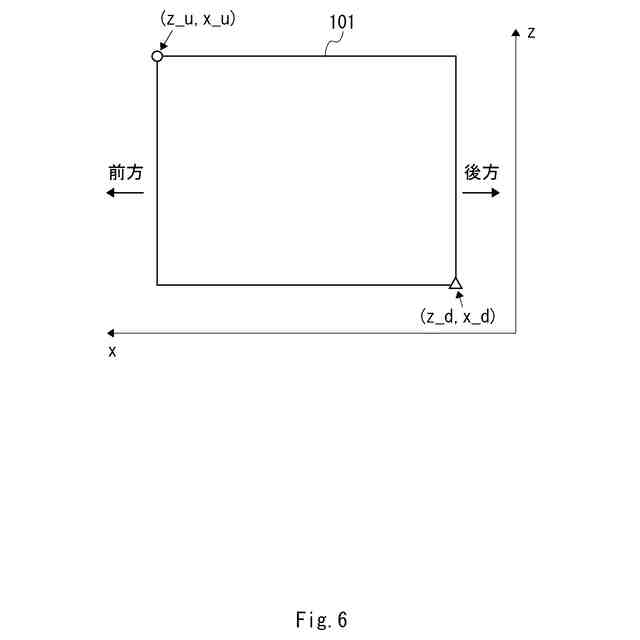
鉛直上方向をz軸のプラス方向、前記移動ロボットの前方をx軸のプラス方向、zx平面に含まれる、前記移動ロボットの筐体の前記側面の領域、のうち、任意の位置の座標を(z’,x’)、前記第1カメラの視点が位置する座標を(z_u,x_u)、前記第2カメラの視点が位置する座標を(z_d,x_d)とすると、
前記第1カメラは、z’>z_u、且つ、x’>x_uとなる座標(z’,x’)が存在しない、という条件を満たすように設置され、
前記第2カメラは、z’<z_d、且つ、x’<x_dとなる座標(z’,x’)が存在しない、という条件を満たすように設置されている、
請求項1に記載の移動システム。
【請求項5】
前記第1所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、上方、且つ、後方、の領域であって、
前記第2所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、下方、且つ、前方、の領域であって、
鉛直上方向をz軸のプラス方向、前記移動ロボットの前方をx軸のプラス方向、zx平面に含まれる、前記移動ロボットの筐体の前記側面の領域、のうち、任意の位置の座標を(z’,x’)、前記第1カメラの視点が位置する座標を(z_u,x_u)、前記第2カメラの視点が位置する座標を(z_d,x_d)とすると、
前記第1カメラは、z’>z_u、且つ、x’<x_uとなる座標(z’,x’)が存在しない、という条件を満たすように設置され、
前記第2カメラは、z’<z_d、且つ、x’>x_dとなる座標(z’,x’)が存在しない、という条件を満たすように設置されている、
請求項1に記載の移動システム。
【請求項6】
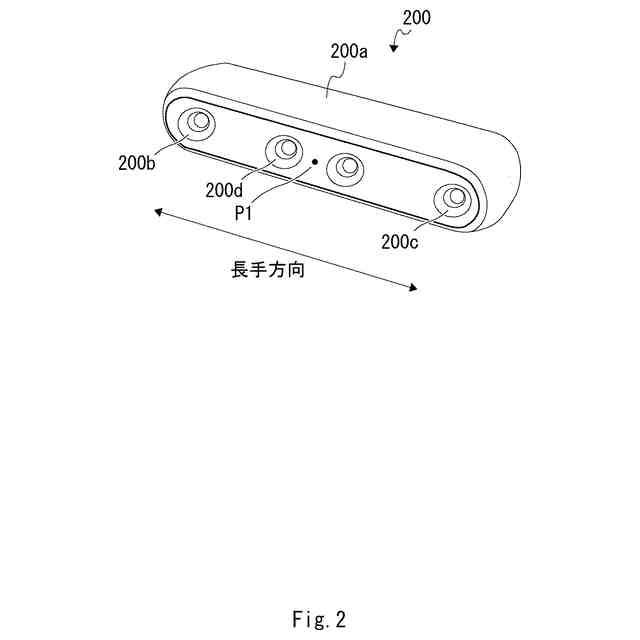
前記第1カメラは、左右方向に延在した形状を有し、長手方向が前記移動ロボットの筐体の前記側面と平行になるように設置され、且つ、
前記第2カメラは、左右方向に延在した形状を有し、長手方向が前記移動ロボットの筐体の前記側面と平行になるように設置されている、
請求項1に記載の移動システム。
【請求項7】
前記第1カメラ及び前記第2カメラは、何れもデプスカメラである、
請求項1に記載の移動システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年では、移動ロボットの周辺環境を効率良く観察することが求められている。関連する技術は、例えば、特許文献1に開示されている。
【0003】
特許文献1には、撮像部及び自己の位置移動のための駆動部を少なくとも有する移動体を遠隔で制御する制御装置が開示されている。この制御装置は、所定の物体を自律的に探索させる探索範囲が指定されたことに対応して、前記探索範囲を特定するために用いられる探索範囲特定情報を生成する生成部と、前記探索範囲特定情報を用いて、前記探索範囲内を探索させるよう前記駆動部および前記撮像部の画角を制御する制御部と、を有する。
【先行技術文献】
【特許文献】
【0004】
特開2016-104512号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示された手法に限られず、引き続き、移動ロボットの周辺環境を効率良く観察することが求められている。
【0006】
本開示は、以上の背景に鑑みなされたものであり、少ない台数のカメラを用いて、移動ロボットの周辺環境を効率よく観察することが可能な、移動システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る移動システムは、移動ロボットと、前記移動ロボットの筐体の側面の領域のうち、上方、且つ、前方及び後方の一方、の領域である第1所定領域に設置された第1カメラと、前記移動ロボットの筐体の側面の領域のうち、下方、且つ、前方及び後方の他方、の領域である第2所定領域に設置された第2カメラと、を備え、前記第1カメラは、当該第1カメラの視点を頂点とする四角錐状の視野範囲の何れかの側面が、前記移動ロボットの筐体の前記側面に実質的に接するように、前記第1所定領域から下方に向いて設置され、且つ、前記第2カメラは、当該第2カメラの視点を頂点とする四角錐状の視野範囲の何れかの側面が、前記移動ロボットの筐体の前記側面に実質的に接するように、前記第2所定領域から上方に向いて設置されている。それにより、この移動システムは、少ない台数のカメラを用いて、移動ロボットの周辺環境を効率よく観察することができる。
【0008】
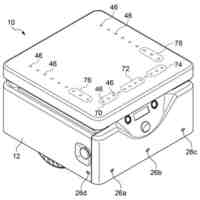
前記移動ロボットの筐体は直方体形状であって、前記第1所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、上方、且つ、前方及び後方の一方、の角部の領域であって、前記第2所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、下方、且つ、前方及び後方の他方、の角部の領域であってもよい。
【0009】
前記移動ロボットの筐体は、角部が丸みを帯びた直方体形状であって、前記第1所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、上方、且つ、前方及び後方の一方、の角部の領域であって、前記第2所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、下方、且つ、前方及び後方の他方、の角部の領域であってもよい。
【0010】
前記第1所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、上方、且つ、前方、の領域であって、前記第2所定領域は、前記移動ロボットの筐体の前記側面の領域のうち、下方、且つ、後方、の領域であって、鉛直上方向をz軸のプラス方向、前記移動ロボットの前方をx軸のプラス方向、zx平面に含まれる、前記移動ロボットの筐体の前記側面の領域、のうち、任意の位置の座標を(z’,x’)、前記第1カメラの視点が位置する座標を(z_u,x_u)、前記第2カメラの視点が位置する座標を(z_d,x_d)とすると、前記第1カメラは、z’>z_u、且つ、x’>x_uとなる座標(z’,x’)が存在しない、という条件を満たすように設置され、前記第2カメラは、z’<z_d、且つ、x’<x_dとなる座標(z’,x’)が存在しない、という条件を満たすように設置されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
1か月前
エイブリック株式会社
定電圧回路
25日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
26日前
ローム株式会社
電源回路
24日前
トヨタ自動車株式会社
自動作業装置
2か月前
井関農機株式会社
自立走行農作業車
25日前
アズビル株式会社
流量制御システム
2か月前
トヨタ自動車株式会社
移動システム
24日前
日昌電気制御株式会社
管理システム
8日前
株式会社ユタカ
半自動切換装置
9日前
トヨタ自動車株式会社
設備の制御方法
1か月前
オムロン株式会社
開発装置、開発方法
2か月前
トヨタ自動車株式会社
マーカースタンド
3日前
井関農機株式会社
作業車両の作業管理システム
26日前
株式会社豊田自動織機
自律走行車両
8日前
横河電機株式会社
電流源回路
1か月前
住友重機械工業株式会社
自律走行台車
1か月前
マキノジェイ株式会社
工作機械
1か月前
三菱電機株式会社
管理システムおよび管理方法
1か月前
個人
ペダル操作検知装置
1か月前
アズビル株式会社
パラメータ探索装置および方法
1か月前
横河電機株式会社
電圧電流変換回路
3日前
オムロン株式会社
サポート装置およびサポート方法
1か月前
エンゼルグループ株式会社
無人搬送システム
2日前
ニチコン株式会社
電源装置
5日前
村田機械株式会社
無人搬送車システム
2か月前
トヨタ自動車株式会社
充電装置
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
10日前
シンフォニアテクノロジー株式会社
共振抑制制御装置
10日前
横河電機株式会社
ロボット管理システム
2か月前
CKD日機電装株式会社
カスケード形PID制御系の設計法
2か月前
ローム株式会社
電圧生成回路
1か月前
株式会社FUJI
工作機械
8日前
株式会社FUJI
工作機械
8日前
株式会社デンソー
ペダル装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ