TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024102612
公報種別
公開特許公報(A)
公開日
2024-07-31
出願番号
2023006619
出願日
2023-01-19
発明の名称
マーカースタンド
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20240724BHJP(制御;調整)
要約
【課題】マーカースタンドの向きの曖昧性を排除する。
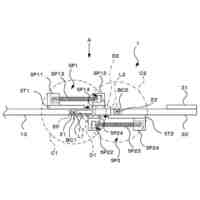
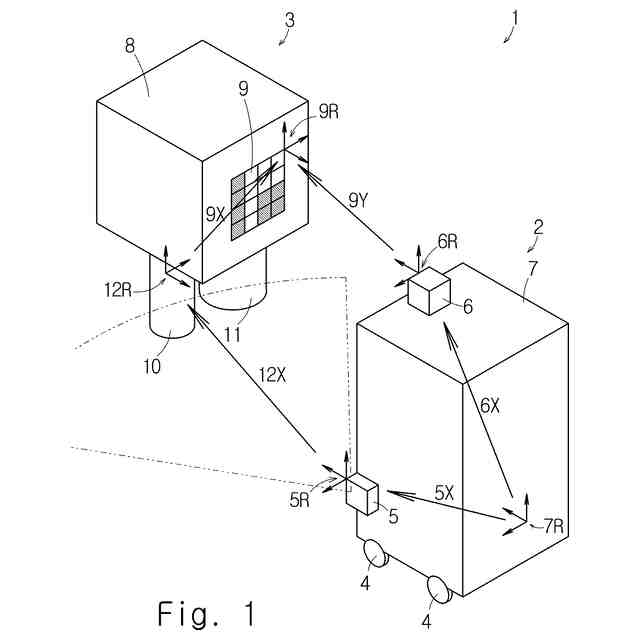
【解決手段】マーカースタンド3は、ロボット本体7のローカル座標系7Rから見た二次元LiDAR5のローカル座標系5Rの相対的な位置及び姿勢を求めるために用いられる。マーカースタンド3は、スタンド本体8と、スタンド本体8に設けられ、撮像カメラ6によって撮像可能なマーカー9と、スタンド本体8に設けられ、二次元LiDAR5によって測距可能な第1脚部10及び第2脚部11と、を含む。第1脚部10及び第2脚部11は、平面視で1回対称性を有する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体本体にLiDARとセンサを搭載して成り、前記移動体本体のローカル座標系から見た前記LiDARのローカル座標系の相対的な位置及び姿勢は既知であり、前記移動体本体のローカル座標系から見た前記センサのローカル座標系の相対的な位置及び姿勢は未知である、移動体において前記移動体本体のローカル座標系から見た前記センサのローカル座標系の相対的な位置及び姿勢を求めるために用いられる、マーカースタンドであって、
スタンド本体と、
前記スタンド本体に設けられ、前記センサによってセンシング可能なマーカーと、
前記スタンド本体に設けられ、前記LiDARによって測距可能な複数の測距対象と、
を含み、
前記複数の測距対象は、平面視で1回対称性を有し、又は、互いに異なる材質から成る、
マーカースタンド。
続きを表示(約 530 文字)
【請求項2】
請求項1に記載のマーカースタンドであって、
前記複数の測距対象は、2つの測距対象を含み、
前記2つの測距対象の水平断面は、何れも円形であり互いに異なる直径を有する、
マーカースタンド。
【請求項3】
請求項1に記載のマーカースタンドであって、
前記複数の測距対象は、2つの測距対象を含み、
前記2つの測距対象の水平断面は、互いに異なる形状を有する、
マーカースタンド。
【請求項4】
請求項1に記載のマーカースタンドであって、
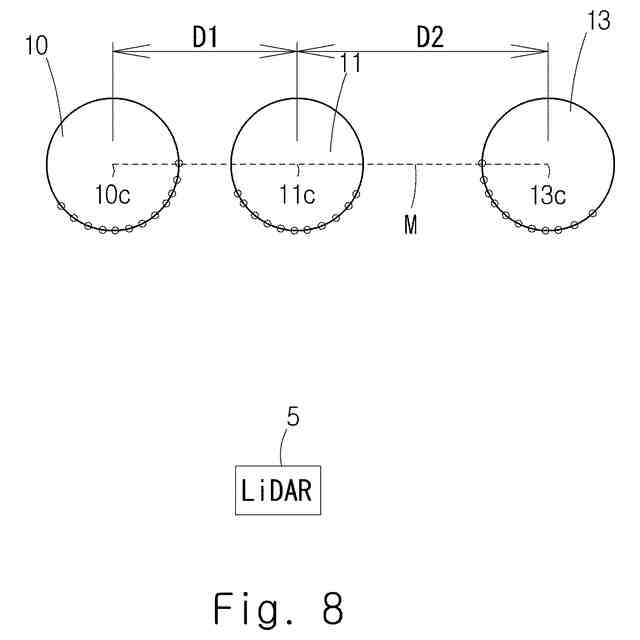
前記複数の測距対象は、3つ以上の測距対象を含み、
前記3つ以上の測距対象は、平面視で1回対称となるように配置されている、
マーカースタンド。
【請求項5】
請求項1から4までの何れか1項に記載のマーカースタンドであって、
前記センサは、撮像カメラである、
マーカースタンド。
【請求項6】
請求項1から4までの何れか1項に記載のマーカースタンドであって、
前記LiDARは、レーザ光を水平面内に出射する二次元LiDARである、
マーカースタンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マーカースタンドに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1は、車両周辺を撮像する車載用カメラの電子的なキャリブレーション方法を開示している。具体的には、車両の周辺にキャリブレーション用のターゲットボードを配置し、車載用カメラでターゲットボードを撮像して得られる撮像データに基づいて車載用カメラの電子的なキャリブレーションを行う。このとき、車両に対してターゲットボードを高精度に位置決めする必要がある。そこで、特許文献1では、レーザ光を照射するレーザ光源を有する照射装置を車両に対して決められた位置に配置し、照射装置からターゲットボードに向かってレーザ光を照射し、レーザ光がターゲットボードの所定位置に照射されるようにターゲットボードを位置決めするようにしている。
【先行技術文献】
【特許文献】
【0003】
特開2010-219663号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本願発明の発明者は、自律移動型ロボットのロボット本体に搭載した撮像装置の電子的なキャリブレーションを検討している。即ち、ロボット本体に撮像装置を組み付けるに際し、ロボット本体や撮像装置の形状誤差やロボット本体に撮像装置を組み付けたときに発生する組付け誤差に起因して、ロボット本体のローカル座標系から見た撮像装置のローカル座標系の相対的な位置及び姿勢には必然的に誤差が発生することになる。これらの誤差のうち特に姿勢誤差は看過することができない。なぜなら、例えば、撮像装置の姿勢誤差が1度であった場合、10メートル先の撮像対象物が約17センチメートル、上下左右の何れかの方向にずれて認識されることになり、自律移動型ロボットの自律移動制御に種々の悪影響を及ぼすからである。
【0005】
上記の姿勢誤差を回避する方法として、形状誤差や組付け誤差の公差を厳しく管理することが挙げられる。しかし、この方法では、自律移動型ロボットの製造コストが嵩むし、歩留まり低下も招くことになる。
【0006】
従って、上記の誤差はそのまま残しつつ、ロボット本体のローカル座標系から見た撮像装置のローカル座標系の相対的な位置及び姿勢を高精度に測定し、その測定結果を用いて撮像装置の電子的なキャリブレーションを行うことが有効である。
【0007】
ロボット本体のローカル座標系から見た撮像装置のローカル座標系の相対的な位置及び姿勢を高精度に測定する手法として、上記の発明者は、以下のような手法を検討している。即ち、マーカーが設けられたスタンド本体に2本の直立する円柱を設けたマーカースタンドを用意し、ロボット本体に高精度に位置決めされたLiDAR(Light Detection And Ranging)で2本の円柱を測距して点群データを生成すると共に、撮像装置でマーカーを撮像させ、点群データと撮像データを用いてロボット本体のローカル座標系から見た撮像装置のローカル座標系の相対的な位置及び姿勢を高精度に測定する。
【0008】
(1)ここで、ロボット本体のローカル座標系から見たLiDARのローカル座標系の相対的な位置及び姿勢は、上記高精度な位置決めにより既知とすることができる。
(2)LiDARのローカル座標系から見た円柱のローカル座標系の相対的な位置及び姿勢は、LiDARによる測距により高精度に取得できる。
(3)円柱のローカル座標系から見たマーカーのローカル座標系の相対的な位置及び姿勢は、実測により既知である。
(4)撮像装置のローカル座標系から見たマーカーのローカル座標系の相対的な位置及び姿勢は、撮像装置による撮像により高精度に取得できる。
そして、ロボット本体のローカル座標系から見た撮像装置のローカル座標系の相対的な位置及び姿勢は、上記(1)から(4)の相対的な位置及び姿勢を行列演算することにより算出することができる。そして、(1)から(4)の相対的な位置及び姿勢が高精度で得られているので、ロボット本体のローカル座標系から見た撮像装置のローカル座標系の相対的な位置及び姿勢も同様に高精度に算出することができる。ここで、高精度とは、典型的には、前述の位置誤差が1センチメートル以下であり、前述の姿勢誤差が0.1度以下であることを意味する。
【0009】
ところで、上記の(2)において、2本の直立する円柱をLiDARによる測距対象としているのは、LiDARの特性上、円柱の認識に関して頑健性があるからである。しかしながら、上記の(2)には未解決の問題を抱えていた。即ち、LiDARから出力された点群データを用いてLiDARのローカル座標系から見た円柱のローカル座標系の相対的な位置及び姿勢を取得するに際し、2本の直立する円柱を区別して識別することができない。従って、LiDARから出力された点群データに基づいてLiDARのローカル座標系から見た円柱のローカル座標系の相対的な位置を算出するに際し、算出結果には2つの解が存在することになる。詳しくは、上記の点群データだけでは、自律移動型ロボットがマーカースタンドの正面に位置しているのか背面に位置しているのかさえ識別することができない。換言すれば、自律移動型ロボットから見たマーカースタンドの向きには180度分の曖昧性が未解決のまま存在していた。
【0010】
そこで、本開示の目的は、マーカースタンドの向きの曖昧性を排除する技術を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
25日前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
1日前
ローム株式会社
半導体集積回路
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
25日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社鷺宮製作所
制御装置
24日前
株式会社オプトン
制御プログラム生成装置
23日前
キヤノン電子株式会社
加工装置、及び、制御方法
10日前
株式会社ダイフク
物品搬送設備
23日前
株式会社ダイフク
物品搬送設備
23日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
16日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
オムロン株式会社
安全装置
23日前
シンフォニアテクノロジー株式会社
異常検知装置
23日前
三菱電機株式会社
電源回路
10日前
株式会社計数技研
移動体、及びプログラム
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
5日前
ローム株式会社
半導体装置
1か月前
株式会社ダイフク
飛行体制御システム
12日前
株式会社日立製作所
製造工程管理システム
24日前
国立大学法人東海国立大学機構
ミリング加工監視方法
3日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
1か月前
株式会社大林組
作業機械の自動運転制御システム
1か月前
株式会社豊田自動織機
無人搬送車両
1か月前
株式会社FUJI
工作機械
26日前
株式会社東芝
監視制御システム及び監視制御方法
11日前
横河電機株式会社
電流出力装置
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ