TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025104810
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222909
出願日
2023-12-28
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250703BHJP(信号)
要約
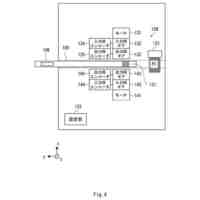
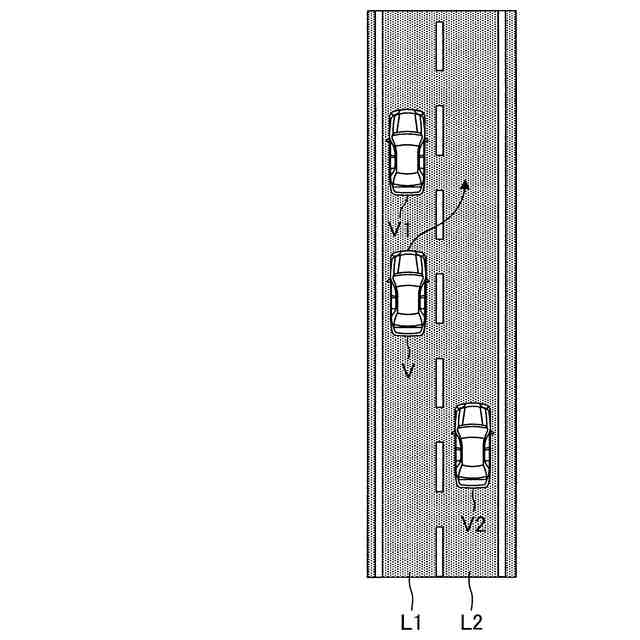
【課題】 自車両の前方に第一物体が存在し、且つ自車両の斜め後方に第二物体が存在している状況下で、自車両が当該第二物体の前方へ移動するシーンにおいて、自車両と第一物体との接触リスクを低減可能な車両制御装置を提供する。
【解決手段】 車両制御装置1のプロセッサは、走行レーンL1に隣接する走行レーンL2において、自車両の斜め後方の所定範囲内に第二物体が存在している場合に、第一物体と自車両との接触リスクが高いと判定するための第一条件が成立し、且つ、自車両が前記走行レーンL2側へ移動するように運転操作されていると判定するための第二条件が成立し、且つ、当該第二物体と自車両との接触リスクが高いと判定するための第三条件が成立している場合に、オーバーライド機能を制限する。
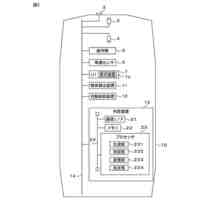
【選択図】 図4
特許請求の範囲
【請求項1】
自車両に関する情報、自車両の運転者に関する情報及び自車両の周辺に位置する物体に関する情報を取得するための車載センサと、
前記車載センサから取得した情報に基づいて、自車両が走行している第一走行レーンにおいて自車両の前方に位置している第一物体と自車両との接触リスクが低減されるように自車両を制御するリスク低減処理を実行するリスク低減機能を備え、さらに、自車両の運転者により所定の運転操作が実行されている場合に、前記リスク低減機能を制限するオーバーライド処理を実行するオーバーライド機能を備えたプロセッサと、
を備えた車両制御装置であって、
前記プロセッサは、前記第一走行レーンに隣接する第二走行レーンにおいて、自車両の斜め後方の所定範囲内に第二物体が存在している場合に、
前記第一物体と自車両との接触リスクが高いと判定するための第一条件が成立し、且つ、
自車両が前記第二走行レーン側へ移動するように運転操作されていると判定するための第二条件が成立し、且つ、
当該第二物体と自車両との接触リスクが高いと判定するための第三条件が成立している場合に、
前記オーバーライド機能を制限する、ように構成された車両制御装置。
続きを表示(約 970 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記第一条件は、自車両と前記第一物体との距離及び相対速度に関する条件を含み、
前記第二条件は、自車両の舵角に関する条件を含み、
前記第三条件は、自車両と前記第二物体との距離及び相対速度に関する条件を含む、
車両制御装置。
【請求項3】
請求項1又は請求項2に記載の車両制御装置において、
前記リスク低減処理は、自車両に搭載された第一装置及び第二装置をそれぞれ制御する第一リスク低減処理及び第二リスク低減処理を含み、
前記オーバーライド処理は、前記第一リスク低減処理及び前記第二リスク低減処理の実行をそれぞれ制限する第一オーバーライド処理及び第二オーバーライド処理を含み、
前記プロセッサは、自車両の一部が前記第二走行レーンに進入しているか否かを判定し、当該判定結果に応じて、前記第一オーバーライド処理及び前記第二オーバーライド処理のうちのいずれか一方又は両方の処理の実行を制限する、ように構成された、車両制御装置。
【請求項4】
請求項3に記載の車両制御装置において、
前記第一リスク低減処理は、自車両の運転者に対して所定の警報が発せられるように前記第一装置としての報知装置を制御する処理であり、
前記第二リスク低減処理は、自車両が制動されるように前記第二装置としての制動装置を制御する処理であり、
前記プロセッサは、自車両の一部が前記第二走行レーンに進入している場合に、前記第一オーバーライド処理を制限し、自車両が前記第二走行レーンに進入していない場合に、前記第一オーバーライド処置及び前記第二オーバーライド処理を制限する、ように構成された、車両制御装置。
【請求項5】
請求項1に記載の車両制御装置において、
前記車載センサは、自車両の運転者の視線の方向に関する情報を取得するためのセンサを含み、
前記プロセッサは、前記第一条件乃至第三条件が成立し、且つ、自車両の運転者の視線が前記第二走行レーンへ向けられていると判定するための第四条件が成立している場合に、前記オーバーライド機能を制限する、ように構成された、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両とその周囲に位置する物体との接触リスクが低減されるように自車両の所定の装置を自動制御する機能を備えた車両制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
自車両とその周囲に位置する物体との接触リスクが低減されるように自車両の所定の装置を自動制御する機能(リスク低減機能)を備えた車両制御装置が提案されている(例えば、下記特許文献1を参照。)。特許文献1の車両制御装置(以下、「従来装置」と称呼する。)は、リスク低減機能として、自車両とその直前に位置する物体との接近状態に関する所定の条件が成立した場合に、自車両が減速されるように制動装置を制御する機能(自動制動機能)を備える。また、従来装置は、自車両の運転者が所定の運転操作を実行している状態において、リスク低減機能を制限する機能(オーバーライド機能)を備える。例えば、運転者がステアリングホイールを操作している場合に、従来装置は、自動制動を実行しない。
【先行技術文献】
【特許文献】
【0003】
特開2012―121534号公報
【発明の概要】
【0004】
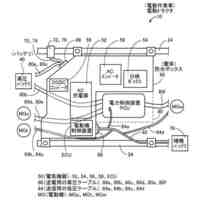
ところで、自車両が走行している第一走行レーンにおける自車両の直前を走行している先行車両に自車両が接近しており、且つ第一走行レーンに隣接する第二走行レーンのうちの自車両の斜め後方の区間を走行している他車両が自車両の側方へ接近してくる場合がある。この状況下で、自車両の運転者が、先行車両を回避するために、第二走行レーン側へ自車両が移動するように操舵するシーンが想定される。このシーンにおいて、第二走行レーンにおける自車両の斜め後方から自車両に接近してくる車両が存在するにも関わらず、運転者が強引に第二走行レーンへ自車両を移動させる際に、当該他車両に対する自車両の運転者の注意力に比べ、先行車両に対する運転者の注意力が低下する虞がある。そのため、自車両と先行車両との接触リスクを低減するために、リスク低減機能が制限されないことが好ましい。しかし、この場合、運転者がステアリングホイールを操作しているため、オーバーライド機能により、リスク低減機能が制限される。すなわち、自動制動が実行されない。
【0005】
本発明の目的の1つは、自車両の前方に第一物体が存在し、且つ自車両の斜め後方に第二物体が存在している状況下で、自車両が当該第二物体の前方へ移動するシーンにおいて、自車両と第一物体との接触リスクを低減可能な車両制御装置を提供することにある。
【0006】
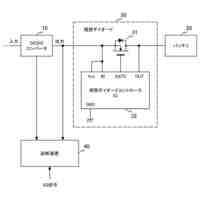
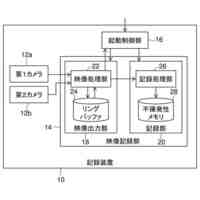
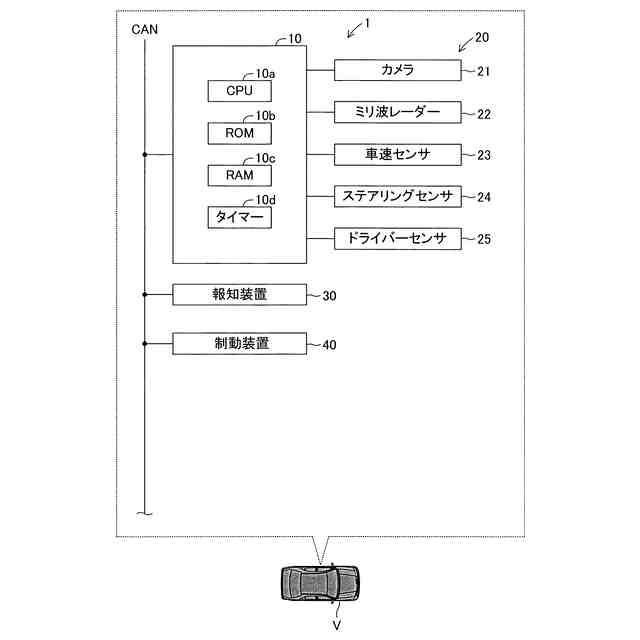
上記課題を解決するために、本発明の車両制御装置(1)は、自車両(V)に関する情報、自車両の運転者に関する情報及び自車両の周辺に位置する物体(V1,V2)に関する情報を取得するための車載センサ(20)と、前記車載センサから取得した情報に基づいて、自車両が走行している第一走行レーン(L1)において自車両の前方に位置している第一物体(V1)と自車両との接触リスクが低減されるように自車両を制御するリスク低減処理(P1,P2)を実行するリスク低減機能を備え、さらに、自車両の運転者により所定の運転操作が実行されている場合に、前記リスク低減機能を制限するオーバーライド処理(OR1,OR2)を実行するオーバーライド機能を備えたプロセッサ(10)と、を備える。
前記プロセッサは、前記第一走行レーンに隣接する第二走行レーン(L2)において、自車両の斜め後方の所定範囲内に第二物体(V2)が存在している場合に、前記第一物体と自車両との接触リスクが高いと判定するための第一条件(A)が成立し、且つ、自車両が前記第二走行レーン側へ移動するように運転操作されていると判定するための第二条件(B)が成立し、且つ、当該第二物体と自車両との接触リスクが高いと判定するための第三条件(C)が成立している場合に、前記オーバーライド機能を制限する。
【0007】
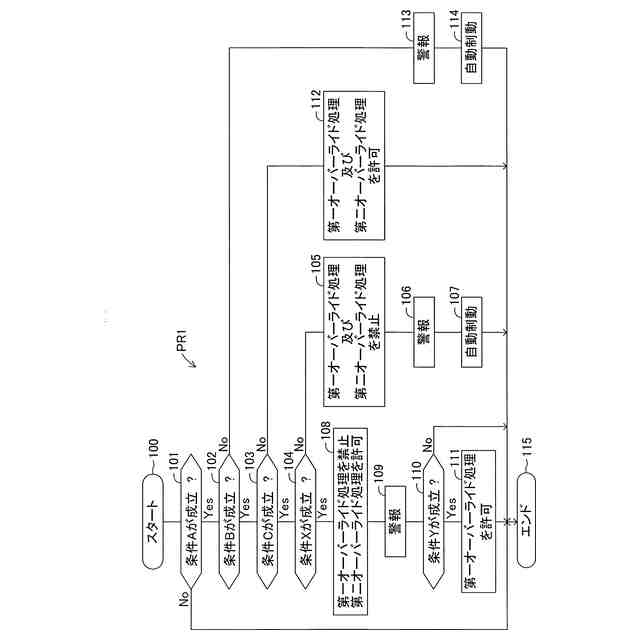
本発明に係る車両制御装置によれば、自車両の直前に位置する第一物体と自車両との接触リスクが低減されるように自車両が自動制御される(リスク低減機能)。運転者が意図的に運転操作を実行している場合には、オーバーライド機能により、リスク低減機能が制限される。これにより、運転者が不要であると感じる自動制御の実行が抑制される。ただし、第二走行レーンにおける自車両の斜め後方に第二物体が存在するにも関わらず、自車両が第二走行レーン側(第二物体の前方)へ移動するような運転操作(強引な車線変更)が実行された場合(第一条件乃至第三条件が成立している場合)には、リスク低減機能が制限されない。よって、第一物体と自車両との接触リスクが低減されるように自車両が制御される。これにより、自車両の安全性が向上される。
【0008】
本発明の一態様に係る車両制御装置において、前記第一条件は、自車両と前記第一物体との距離(D1)及び相対速度(vr1)に関する条件を含み、前記第二条件は、自車両の舵角に関する条件を含み、前記第三条件は、自車両と前記第二物体との距離(D2)及び相対速度(vs2)に関する条件を含む。
【0009】
これによれば、プロセッサは、カメラ、レーダーなどの周知のセンサを用いて取得した情報に基づいて、第一条件乃至第三条件の成否を比較的簡単に判定できる。
【0010】
本発明の他の態様に係る車両制御装置において、前記リスク低減処理は、自車両に搭載された第一装置及び第二装置をそれぞれ制御する第一リスク低減処理(P1)及び第二リスク低減処理(P2)を含み、前記オーバーライド処理は、前記第一リスク低減処理及び前記第二リスク低減処理の実行をそれぞれ制限する第一オーバーライド処理(OR1)及び第二オーバーライド処理(OR2)を含み、前記プロセッサは、自車両の一部が前記第二走行レーンに進入しているか否かを判定し、当該判定結果に応じて、前記第一オーバーライド処理及び前記第二オーバーライド処理のうちのいずれか一方又は両方の処理の実行を制限する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
方法
11日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
自動車
5日前
トヨタ自動車株式会社
減圧弁
今日
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
車両構造
10日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
熱交換器
今日
トヨタ自動車株式会社
接続構造
3日前
トヨタ自動車株式会社
コネクタ
今日
トヨタ自動車株式会社
評価装置
3日前
トヨタ自動車株式会社
判定装置
5日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
診断装置
4日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
監視装置
4日前
トヨタ自動車株式会社
ステータ
5日前
トヨタ自動車株式会社
記録装置
4日前
トヨタ自動車株式会社
燃焼ノズル
3日前
トヨタ自動車株式会社
車両用灯具
10日前
トヨタ自動車株式会社
電池パック
12日前
トヨタ自動車株式会社
吸気ダクト
6日前
トヨタ自動車株式会社
電動作業車
3日前
トヨタ自動車株式会社
電気自動車
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ