TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025111982
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024005949
出願日
2024-01-18
発明の名称
監視装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250724BHJP(信号)
要約
【課題】2つの移動物体が互いに接近し過ぎる前に、接近していることを2つの移動物体へ通知する監視装置を提供する。
【解決手段】監視装置は、自車両の周囲の所定の範囲に、第1移動物体及び第2移動物体があるか否かを判定する第1判定部と、第1移動物体に対して第1検出範囲を設定し、且つ、第2移動物体に対して第2検出範囲を設定する設定部と、第1検出範囲に含まれる第2移動物体の検出を妨げ、且つ、第2検出範囲に含まれる第1移動物体の検出を妨げる可能性のある障害物があるか否かを判定する第2判定部と、障害物によって第1検出範囲内の第2移動物体の検出が妨げられ、且つ、障害物によって第2検出範囲内の第1移動物体の検出が妨げられた状態で、第1移動物体と第2移動物体とが基準距離まで近づくか否かを判定する第3判定部と、第1移動物体及び第2移動物体に対して、警告を通知することを決定する決定部と、を有する。
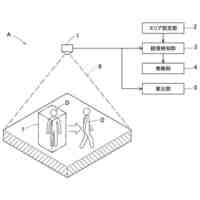
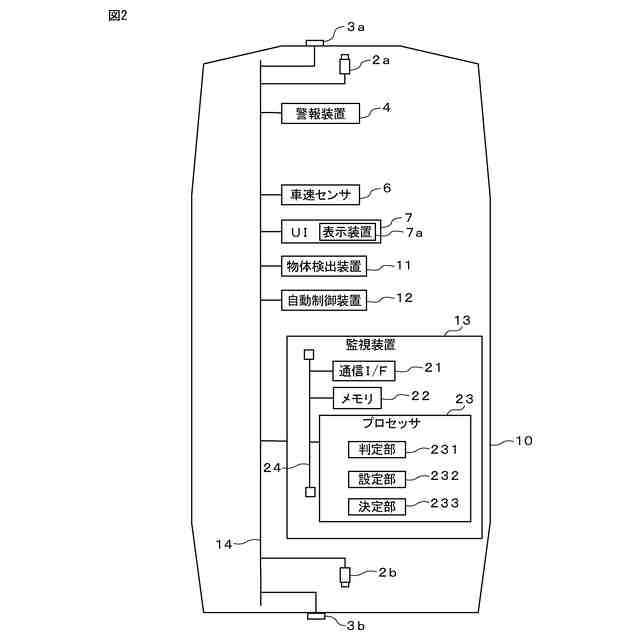
【選択図】図2
特許請求の範囲
【請求項1】
自車両の周囲の所定の範囲に、第1移動物体及び第2移動物体があるか否かを判定する第1判定部と、
前記第1判定部によって前記第1移動物体及び前記第2移動物体があると判定された場合、前記第1移動物体に対して他の移動物体を検出する第1検出範囲を設定し、且つ、前記第2移動物体に対して他の移動物体を検出する第2検出範囲を設定する設定部と、
前記設定部によって前記第1検出範囲及び前記第2検出範囲が設定された場合、前記第1検出範囲に含まれる前記第2移動物体の検出を妨げ、且つ、前記第2検出範囲に含まれる前記第1移物体の検出を妨げる可能性のある障害物があるか否かを判定する第2判定部と、
前記第2判定部によって前記障害物があると判定された場合、前記障害物によって前記第1検出範囲内の前記第2移動物体の検出が妨げられ、且つ、前記障害物によって前記第2検出範囲内の前記第1移動物体の検出が妨げられた状態で、前記第1移動物体と前記第2移動物体とが所定の基準距離まで近づくか否かを判定する第3判定部と、
前記第3判定部によって前記第1移動物体と前記第2移動物体とが前記基準距離まで近づくと判定された場合、前記第1移動物体及び前記第2移動物体に対して、警告を通知することを決定する決定部と、
を有する、ことを特徴とする監視装置。
続きを表示(約 440 文字)
【請求項2】
前記第3判定部は、前記第1移動物体及び前記第2移動物体と自車両との位置関係に基づいて、前記基準距離を設定する、請求項1に記載の監視装置。
【請求項3】
前記第3判定部は、前記第1移動物体及び前記第2移動物体が、自車両に対して同じ側にいる場合、前記第1移動物体及び前記第2移動物体が自車両に対して異なる側に位置する場合よりも短くなるように、前記基準距離を設定する、請求項2に記載の監視装置。
【請求項4】
前記第3判定部は、前記第1移動物体及び前記第2移動物体の速度に基づいて、前記基準距離を設定する、請求項1に記載の監視装置。
【請求項5】
前記第3判定部は、前記第1移動物体の速度及び前記第2移動物体の速度のうちの何れか一方の速度が所定の基準速度を超える場合、前記第1移動物体の速度及び前記第2移動物体の速度が前記基準速度を超えない場合よりも長くなるように、前記基準距離を設定する、請求項4に記載の監視装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、監視装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
車両を制御する自動制御装置は、センサを用いて他車両を検出した場合、自車両と他車両との間に安全な距離を保つように自車両を制御する。これにより、自車両が他車両と接近することが防止される。
【0003】
車両の周辺に背の高い構造物があると、センサの検出範囲が構造物に遮られて、センサにより検出できない領域が生じる。他車両がセンサの検出できない領域にいると、センサは、他車両を検出できない。
【0004】
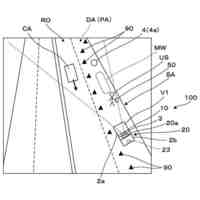
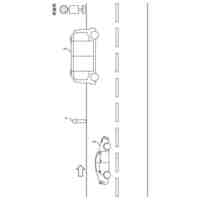
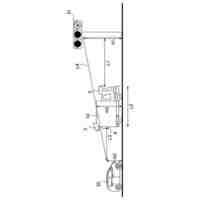
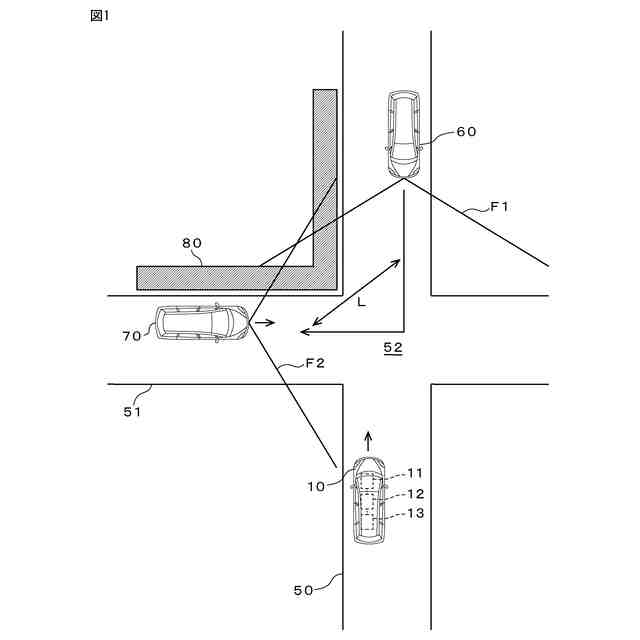
2つの車両が互いに接近しているが、2つの車両は、互いにセンサの検出できない領域に位置することがある。例えば、自車両が信号のない交差点の手前におり、自車両の前方の交差点において、この交差点を右折しようと走行している対向車両がいるとする。また、対向車両が右折する方向から、他車両が交差点を直進しようと走行しているとする(例えば、図1参照)。ここで、対向車両と他車両との間に高い構造物が位置していると、2つの車両は、互いにセンサの検出できない領域に位置する。
【先行技術文献】
【特許文献】
【0005】
特開2017-174449号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
この場合、対向車両と他車両は接近しているが、互いにセンサの検出できない領域に位置するので、2つの車両は相手を検出することができない。
【0007】
対向車両及び他車両が交差点に進入すると構造物がなくなるので、2つの車両は相手を検出できる。しかし、この時点では、2つの車両はかなり近づいた状態となっている。
【0008】
一方、対向車両及び他車両が自車両のセンサの検出範囲内にあれば、自車両は対向車両及び他車両が接近していることを検出できる。
【0009】
本開示は、2つの移動物体が互いに接近していることを検出した場合、互いが接近し過ぎる前に、接近していることを2つの移動物体へ通知する監視装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
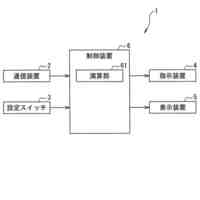
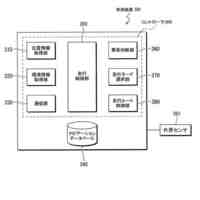
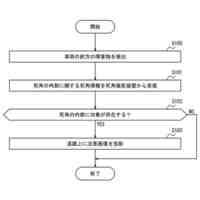
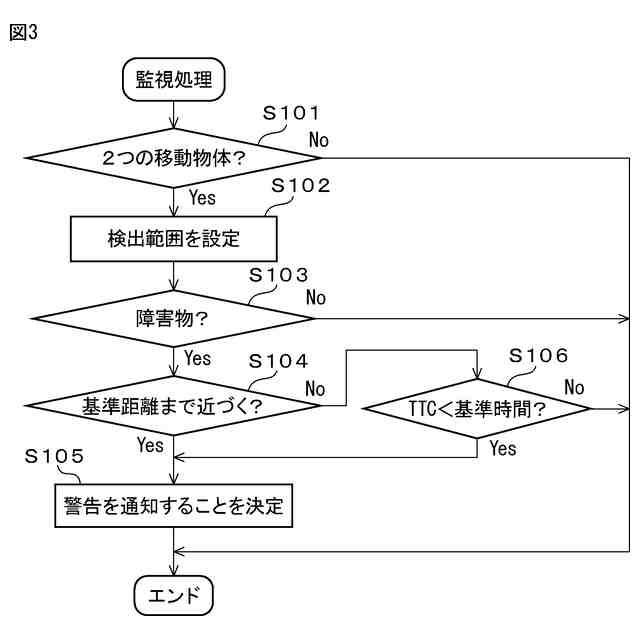
(1)一の実施形態によれば、監視装置が提供される。この監視装置は、自車両の周囲の所定の範囲に、第1移動物体及び第2移動物体があるか否かを判定する第1判定部と、第1判定部によって第1移動物体及び第2移動物体があると判定された場合、第1移動物体に対して他の移動物体を検出する第1検出範囲を設定し、且つ、第2移動物体に対して他の移動物体を検出する第2検出範囲を設定する設定部と、設定部によって第1検出範囲及び第2検出範囲が設定された場合、第1検出範囲に含まれる第2移動物体の検出を妨げ、且つ、第2検出範囲に含まれる第1移動物体の検出を妨げる可能性のある障害物があるか否かを判定する第2判定部と、第2判定部によって障害物があると判定された場合、障害物によって第1検出範囲内の第2移動物体の検出が妨げられ、且つ、障害物によって第2検出範囲内の第1移動物体の検出が妨げられた状態で、第1移動物体と第2移動物体とが所定の基準距離まで近づくか否かを判定する第3判定部と、第3判定部によって第1移動物体と第2移動物体とが基準距離まで近づくと判定された場合、第1移動物体及び第2移動物体に対して、警告を通知することを決定する決定部と、を有する、ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
安全支援装置
1か月前
日本無線株式会社
船舶システム
1か月前
日本信号株式会社
車両検知装置
4日前
トヨタ自動車株式会社
サーバ
1か月前
ダイハツ工業株式会社
移動支援装置
1か月前
オ,ウォンチョル
交通信号システム
11日前
株式会社デンソー
運転評価支援装置
11日前
トヨタ自動車株式会社
通信システム
12日前
株式会社スターオークス
補助信号機及び信号機
1か月前
グローリー株式会社
監視システム
11日前
オムロン株式会社
センサシステム
1か月前
オムロン株式会社
センサシステム
1か月前
オムロン株式会社
センサシステム
1か月前
能美防災株式会社
表示装置
1か月前
国立大学法人九州工業大学
情報伝達システム
1か月前
トヨタ自動車株式会社
路側装置
1か月前
トヨタ自動車株式会社
路側装置
1か月前
トヨタ自動車株式会社
路側装置
1か月前
トヨタ自動車株式会社
路側装置
1か月前
株式会社中電工
警報システム
1か月前
トヨタ自動車株式会社
報知装置
1か月前
能美防災株式会社
火災受信機
1か月前
トヨタ自動車株式会社
路側装置
1か月前
テイ・エス テック株式会社
車両内装システム
1か月前
一般財団法人中部電気保安協会
見守りシステム
1か月前
能美防災株式会社
煙感知器
4日前
能美防災株式会社
防犯システム
1か月前
ウェイモ エルエルシー
自律車両の停車位置変更
13日前
トヨタ自動車株式会社
情報処理装置
12日前
日本電気株式会社
監視装置、監視方法、及びプログラム
1か月前
スズキ株式会社
運転支援装置
19日前
矢崎エナジーシステム株式会社
車載器
1か月前
日産自動車株式会社
制御装置及び制御方法
4日前
杭特電子股分有限公司
車両温度異常警報システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
吉川工業株式会社
接近警報システム
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ