TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025105245
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223667
出願日
2023-12-28
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/14 20200101AFI20250703BHJP(車両一般)
要約
【課題】自車両による追越車線の閉塞行為を抑制する。
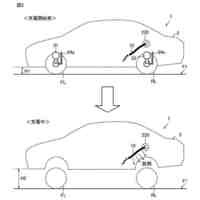
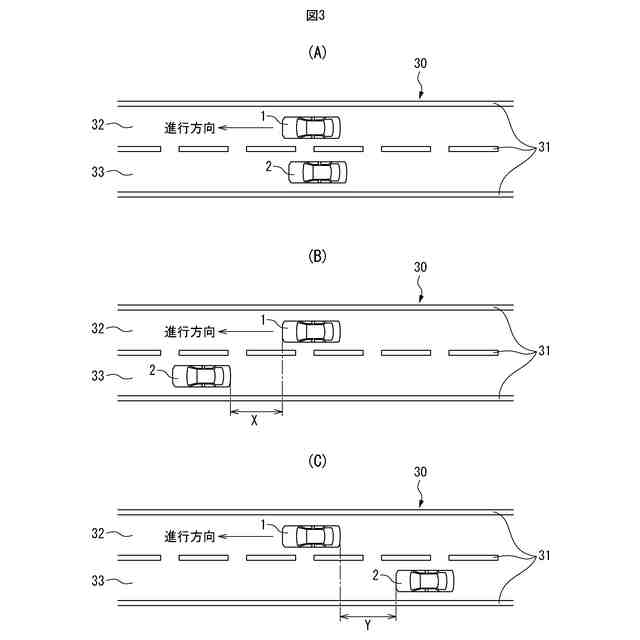
【解決手段】自車両(1)の周囲を走行する他車両(2)を検知可能な検知装置を具備する。自車両(1)が追越車線(33)を走行中に、検知装置が、隣接する走行車線(32)を自車両(1)と所定時間以上並走する他車両(2)を検知したときには、自車両(1)が追越車線(33)を閉塞中であることを自車両(1)の運転者に通知し、或いは、自車両(1)が追越車線(33)を閉塞しない走行状態へ移行させる運転支援が行われる。
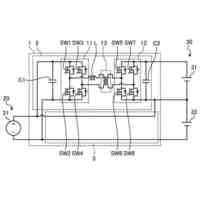
【選択図】図3
特許請求の範囲
【請求項1】
自車両の周囲を走行する他車両を検知可能な検知装置と、プロセッサとを具備し、
自車両が追越車線を走行中に、検知装置が、隣接する走行車線を、所定時間以上、自車両と並走する他車両を検知したときには、プロセッサにより、自車両が追越車線を閉塞中であることを自車両の運転者に通知し、或いは、自車両が追越車線を閉塞しない走行状態へ移行させる運転支援を行う運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は運転支援装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
自車両が追越車線を走行しているときに自車両に後続車両が接近して自車両に追従走行していることが検出され、このとき、後続車両の追従走行状態が、所定時間継続した場合には、後続車両が追従走行していることを自車両の運転者に通知し、自車両を追越車線に隣接する車線に車線変更させるか、或いは、自車両の車速を法定速度まで上昇させるようにした車両制御装置が公知である(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/123344号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで追越車線は、追越時以外は使用しないのが社会通念であり、従って、追越時以外は追越車線を使用しないように対策するのが好ましいと言える。上述の車両制御装置では、追越車線の使用について、自車両に後続車両が接近して自車両に追従走行したときのみを問題としており、追越時以外は追越車線を使用しないようにすることについては示唆していない。
【課題を解決するための手段】
【0005】
本発明によれば、自車両の周囲を走行する他車両を検知可能な検知装置と、プロセッサとを具備し、自車両が追越車線を走行中に、検知装置が、隣接する走行車線を、所定時間以上、自車両と並走する他車両を検知したときには、プロセッサにより、自車両が追越車線を閉塞中であることを自車両の運転者に通知し、或いは、自車両が追越車線を閉塞しない走行状態へ移行させる運転支援を行う運転支援装置が提供される。
【発明の効果】
【0006】
自車両による追越車線の閉塞行為を抑制することができる。
【図面の簡単な説明】
【0007】
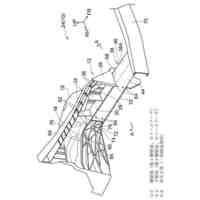
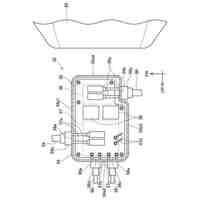
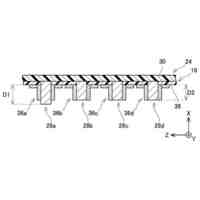
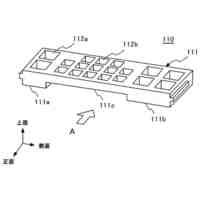
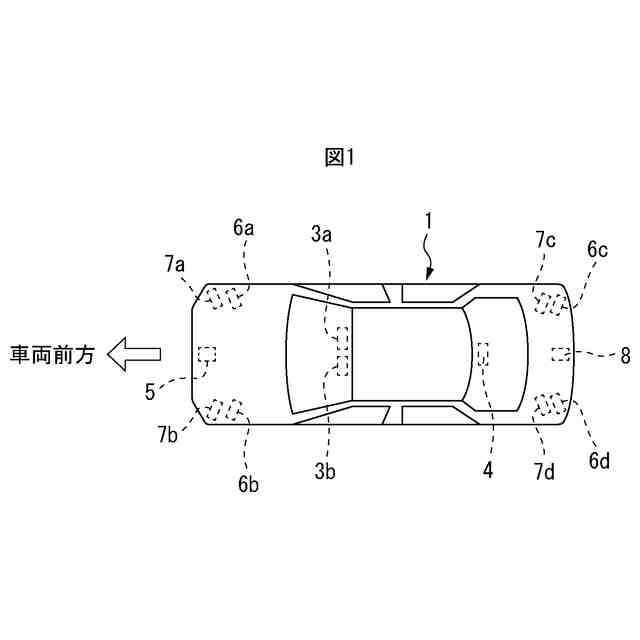
図1は、図解的に示す自車両の上面図である。
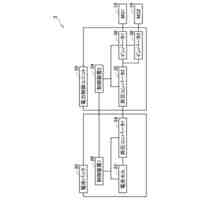
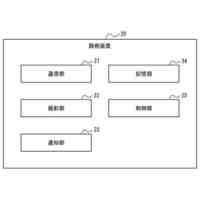
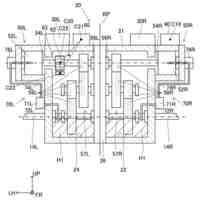
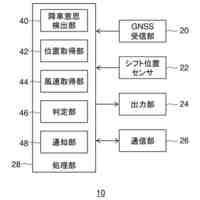
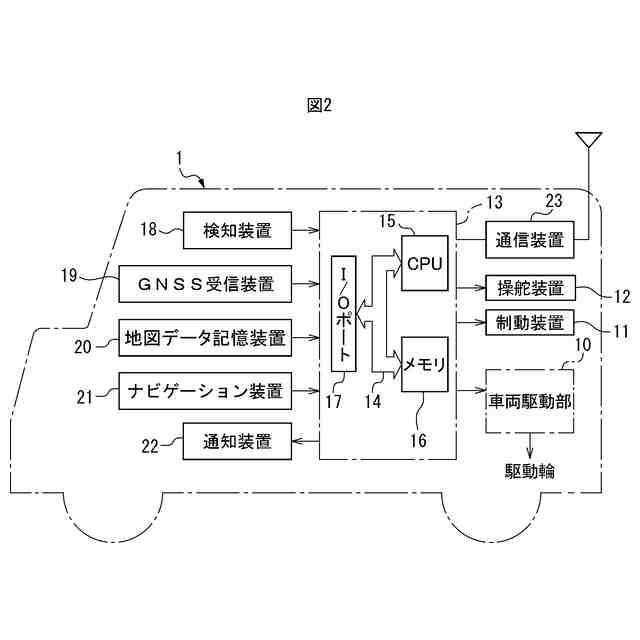
図2は、自車両の機能構成を示す図である。
図3は、道路の上面図である。
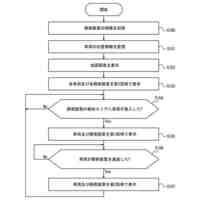
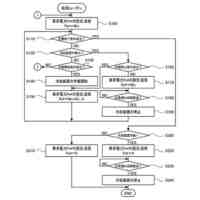
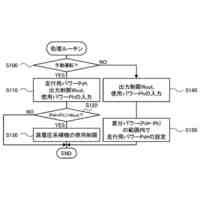
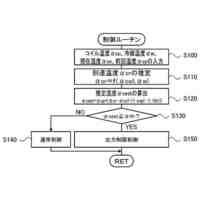
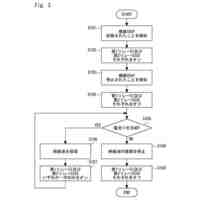
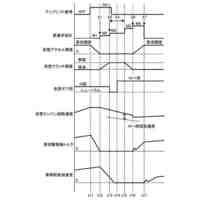
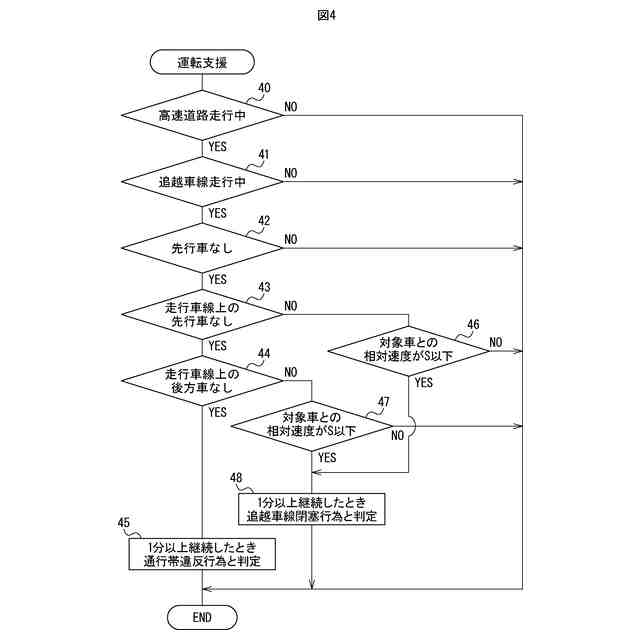
図4は、運転支援処理を実行するためのフローチャートである。
【発明を実施するための形態】
【0008】
最初に、本発明において用いている用語について説明すると、本発明では、本発明による制御対象である車両を「自車両」と称している。
図1は、上方から見たときの自車両1を図解的に示しており、図2は、図1に示される自車両1の機能構成を示している。なお、この自車両1は、手動運転および自動運転のいずれの運転も可能である。図2を参照すると、10は車両1の駆動輪に駆動力を与えるための車両駆動部、11は車両1を制動するための制動装置、12は車両1を操舵するための操舵装置、13は車両1内に搭載された電子制御ユニットを夫々示す。図2に示されるように、電子制御ユニット13はデジタルコンピュータからなり、双方向性バス14によって互いに接続されたCPU(プロセッサ)15、ROMおよびRAMからなるメモリ16および入出力ポート17を具備する。
【0009】
一方、図2に示されるように、自車両1には、自車両1が自動運転を行うのに必要な各種センサを含む検出装置18が設置されている。この検出装置18は、自車両1の状態を検出するセンサおよび自車両1の周辺を検出するセンサを含んでいる。この場合、自車両1の状態を検出するセンサとしては、加速度センサ、速度センサ、方位角センサ、地磁気センサが用いられており、自車両1の周辺を検出するセンサとしては、自車両1の前方、側方、後方を撮影するカメラ、および、自車両1の前方、側方、後方を検知するライダー(LIDAR)、レーダー、クリアランスソナー等が用いられている。
【0010】
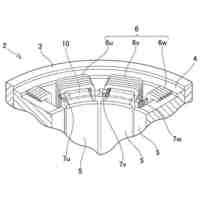
図1には、自車両1に設置されたセンサの一例が示されている。図1に示される例では、自車両1に、自車両1の前方を撮影する前方カメラ3a、3bと、自車両1の後方を撮影する後方カメラ4と、自車両1の前方に向けてミリ波を放射する長距離ミリ波レーダー5と、自車両1の側方に向けてミリ波を放射する中距離ミリ波レーダー6a、6b、6c、6dと、自車両1の側方に向けてレーザー光を照射するライダー7a、7b、7c、7dと、自車両1の後方に向けて超音波を放出するクリアランスソナー8とが設置されている。なお、図1に示されるカメラやセンサの設置方法は単なる一例を示しており、これらカメラやセンサの設置方法については種々の方法が存在する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
方法
7日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
電動車
6日前
トヨタ自動車株式会社
移動体
6日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
充電器
4日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
充電器
7日前
トヨタ自動車株式会社
接続構造
11日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
路側装置
4日前
トヨタ自動車株式会社
電極触媒
5日前
トヨタ自動車株式会社
充電方法
4日前
トヨタ自動車株式会社
駆動装置
6日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
電動車両
7日前
トヨタ自動車株式会社
駆動装置
6日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
駆動装置
6日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
通知装置
11日前
トヨタ自動車株式会社
電源装置
6日前
トヨタ自動車株式会社
コネクタ
6日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
電池パック
6日前
トヨタ自動車株式会社
昇降圧回路
11日前
トヨタ自動車株式会社
電気自動車
5日前
トヨタ自動車株式会社
電気自動車
5日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
電池パック
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ