TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024138663
公報種別
公開特許公報(A)
公開日
2024-10-09
出願番号
2023049254
出願日
2023-03-27
発明の名称
位置決め装置
出願人
東レエンジニアリング株式会社
代理人
個人
,
個人
主分類
G05D
3/12 20060101AFI20241002BHJP(制御;調整)
要約
【課題】位置決め対象物及び前記位置決め対象物を移動させる移動部が有する外乱要因による影響を抑制し、位置決め精度を向上させた位置決め装置を提供する。
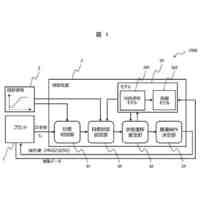
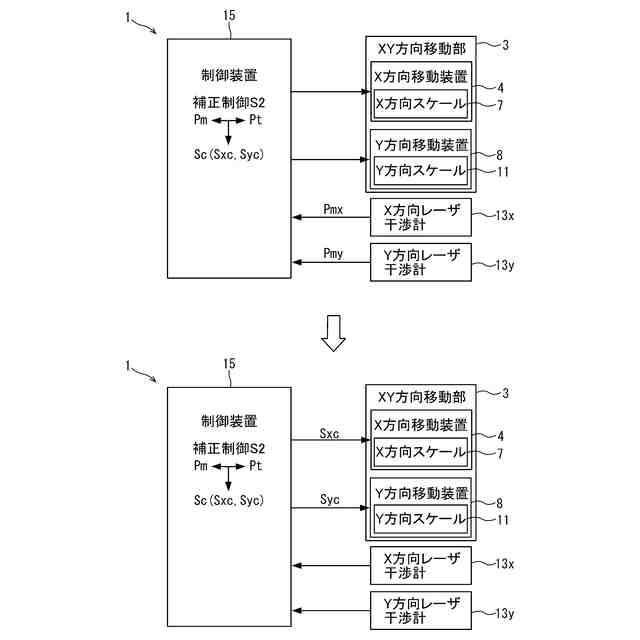
【解決手段】XY方向移動部3と、撮像装置12と、撮像装置12のX方向の位置およびY方向の位置を計測するX方向レーザ干渉計13x、Y方向レーザ干渉計13yと、XY位置制御信号SをXY方向移動部3に対して出力し、X方向レーザ干渉計13x、Y方向レーザ干渉計13yが計測した計測位置Pmを取得する制御部15と、を有する。目標位置Ptと、計測位置Pmとに基づいて、撮像装置12のX方向の位置およびY方向の位置を補正するXY位置補正制御信号ScをXY方向移動部3に対して出力する。
【選択図】図1
特許請求の範囲
【請求項1】
基部と、
前記基部に支持され、X方向の位置および前記X方向に直交するY方向の位置を制御するXY位置制御信号に基づいて、前記基部に対して前記X方向および前記Y方向に移動可能に構成されるXY方向移動部と、
前記XY方向移動部に支持される位置決め対象物と、
前記基部に支持され、前記基部に対する前記位置決め対象物の前記X方向の位置および前記Y方向の位置を計測する対象物位置計測部と、
前記対象物を前記X方向の目標位置および前記Y方向の目標位置に移動させる前記XY位置制御信号を前記XY方向移動部に対して出力し、前記対象物位置計測部が計測した前記対象物の前記X方向の計測位置および前記Y方向の計測位置を取得する制御部と、
を有する位置決め装置であって、
前記制御部は、
前記X方向の目標位置および前記Y方向の目標位置と、前記対象物位置計測部から取得した前記X方向の計測位置および前記Y方向の計測位置とに基づいて、前記位置決め対象物の前記X方向の位置および前記Y方向の位置を補正する補正位置制御信号を前記XY方向移動部に対して出力する、
位置決め装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の位置決め装置において、
前記位置決め対象物は、
所定の方向の位置を制御する位置制御信号に基づいて、前記XY方向移動部に対して前記所定の方向に移動可能に構成される所定方向移動部を含み、
前記対象物位置計測部は、
前記所定方向移動部の移動方向の位置を計測可能に構成され、
前記制御部は、
前記所定方向移動部を所定方向の目標位置に移動させる前記位置制御信号を前記所定方向移動部に対して出力する、
位置決め装置。
【請求項3】
請求項1に記載の位置決め装置において、
前記位置決め対象物は、
前記X方向および前記Y方向にそれぞれ直交するZ方向の位置を制御するZ方向位置制御信号に基づいて、前記XY方向移動部に対して前記Z方向に移動可能に構成されるZ方向移動部を含み、
前記対象物位置計測部は、
前記Z方向の位置を制御する前記Z方向位置制御信号に基づいて、前記基部に対してZ方向に移動可能に構成される計測移動部を含み、
前記制御部は、
前記Z方向移動部をZ方向の目標位置に移動させる前記Z方向位置制御信号を前記Z方向移動部および前記計測移動部に対して出力し、前記Z方向移動部の前記Z方向の移動に応じて、前記計測移動部によって前記Z方向に移動した前記対象物位置計測部が計測した前記Z方向移動部の前記X方向の計測位置および前記Y方向の計測位置を取得する、
位置決め装置。
【請求項4】
請求項3に記載の位置決め装置において、
前記対象物位置計測部は、
前記X方向の位置および前記Y方向の位置を示すスケール部材、および前記スケール部材における座標を検出するヘッド部材を含み、
前記ヘッド部材または前記スケール部材のうちいずれか一方の部材が前記Z方向移動部に支持され、前記ヘッド部材に支持されていない他方の部材が前記計測移動部に支持され、
前記Z方向移動部の前記Z方向の位置に基づいて、前記計測移動部によって前記スケール部材と前記ヘッド部材との間隔を調整可能に構成される、
位置決め装置。
【請求項5】
請求項3または4に記載の位置決め装置において、
前記制御部は、
前記Z方向位置制御信号に基づく前記Z方向移動部の移動量が所定範囲内である場合、前記計測移動部の前記Z方向の位置を維持するZ方向位置維持制御信号を前記計測移動部に対して出力する、
位置決め装置。
【請求項6】
請求項1または2に記載の位置決め装置において、
前記対象物位置計測部は、
前記X方向および前記Y方向のうちいずれか一方の方向の位置を計測可能、且つ他方の方向の所定範囲内の位置ずれを計測可能に構成される、
位置決め装置。
【請求項7】
請求項1または2に記載の位置決め装置において、
前記位置決め対象物は、
アライメントカメラを有する、
位置決め装置。
【請求項8】
請求項1または2に記載の位置決め装置において、
前記位置決め対象物は、
ボンディングヘッドを有する、
位置決め装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は対象物を位置決めする位置決め装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
半導体製造装置、インクジェット塗布装置等の製造装置は、基板等を載置するステージと、前記基板等にICチップを接続するボンダ装置、インク等を塗布する塗布装置等の加工装置とを有している。前記製造装置は、ステージ上の基板等に対する加工装置の位置を相対的に位置決めする位置決め装置によってステージまたは加工装置を任意の位置に移動可能に構成されている。前記位置決め装置は、前記ステージまたは前記加工装置をそれぞれ移動させるアクチュエータと、前記アクチュエータを制御する制御装置とを有する。また、前記アクチュエータは、前記ステージまたは前記加工装置の位置を計測する計測装置を有している。前記位置決め装置は、前記計測装置からの計測信号に基づいて前記ステージまたは前記加工装置を目標位置に移動させる。
【0003】
このような位置決め装置は、数μm以下の高い位置決め精度が求められる。一方、位置決め装置は、アクチュエータの精度のばらつき、機構部分の摩耗等による経年変化、環境温度による構成部材の熱膨張または熱収縮等により目標位置に対する位置決め位置にずれが生じる。よって、前記製造装置は、前記計測装置の計測値に基づいて前記ステージまたは前記加工装置を目標位置に移動させても所定の精度で位置決めできない可能性がある。そこで、アクチュエータの精度のばらつき、機構部分の摩耗等による経年変化、環境温度による構成部材の熱膨張または熱収縮等によって生じる位置決めのずれを抑制するための位置決め装置が知られている。
【0004】
特許文献1に記載の部品実装装置は、所定位置に位置決めした基板に搭載ヘッドによってピックアップした部品を搭載する。前記部品実装装置は、校正用基板を所定位置に位置決めする位置決め手段と、前記搭載ヘッドによりピックアップした校正用部品を制御データに基づいて前記校正用基板上の目標搭載位置に搭載する校正用部品搭載手段と、前記校正用基板上に搭載された前記校正用部品の実際の搭載位置と前記目標搭載位置とのずれを検出して制御データの校正を行う校正手段とを有する。前記部品実装装置は、前記校正用基板と前記校正用部品とを用いて前記校正用基板に対する前記校正用部品の目標搭載位置と搭載位置とのずれに基づいて前記制御データを校正する。
【先行技術文献】
【特許文献】
【0005】
特開2008-227047号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の部品実装装置の位置決め精度は、制御データに基づいて前記校正用基板上の目標搭載位置に前記校正用部品を搭載する校正用部品搭載手段の構造上の誤差および制御上の誤差等の外乱要因を含んでいる。例えば、特許文献1に記載の部品実装装置は、前記校正用部品搭載手段の剛性が高くない場合、前記制御データの校正によって制御上の誤差を修正しても、搬送物の慣性モーメントの影響による前記校正用部品搭載手段の構造上の誤差が生じ、必要な位置決め精度が得られない場合があった。
【0007】
本発明の目的は、位置決め対象物および前記位置決め対象物を移動させる移動部が有する外乱要因による影響を抑制し、位置決め精度を向上させた位置決め装置の提供を目的とする。
【課題を解決するための手段】
【0008】
本発明者は、位置決め対象物および前記位置決め対象物を移動させる移動部が有する外乱要因による影響を抑制し、位置決め精度を向上させた位置決め装置の構成について検討した。鋭意検討の結果、本発明者は、以下のような構成に想到した。
【0009】
本発明の実施形態に係る位置決め装置は、基部と、前記基部に支持され、X方向の位置および前記X方向に直交するY方向の位置を制御するXY位置制御信号に基づいて、前記基部に対して前記X方向および前記Y方向に移動可能に構成されるXY方向移動部と、前記XY方向移動部に支持される位置決め対象物と、前記基部に支持され、前記基部に対する前記位置決め対象物の前記X方向の位置および前記Y方向の位置を計測する対象物位置計測部と、前記対象物を前記X方向の目標位置および前記Y方向の目標位置に移動させる前記XY位置制御信号を前記XY方向移動部に対して出力し、前記対象物位置計測部が計測した前記対象物のX方向の計測位置およびY方向の計測位置を取得する制御部と、を有する位置決め装置である。
【0010】
前記制御部は、前記X方向の目標位置および前記Y方向の目標位置と、前記対象物位置計測部から取得した前記X方向の計測位置および前記Y方向の計測位置とに基づいて、前記位置決め対象物の前記X方向の位置および前記Y方向の位置を補正するXY位置補正制御信号を前記XY方向移動部に対して出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
無人走行体
12日前
株式会社FUJI
工作機械
1か月前
株式会社豊田自動織機
自動走行体
23日前
エイブリック株式会社
基準電圧回路
1日前
エイブリック株式会社
基準電流回路
2か月前
アズビル株式会社
設定システム
2日前
トヨタ自動車株式会社
制御システム
1か月前
オムロン株式会社
自律作業システム
12日前
株式会社熊谷組
巡回ルート作成装置
1日前
株式会社ダイヘン
電力変換装置
3日前
エイブリック株式会社
シャントレギュレータ
8日前
株式会社ダイヘン
電力変換装置
3日前
エイブリック株式会社
ボルテージレギュレータ
5日前
株式会社ダイフク
搬送設備
1か月前
オムロン株式会社
設計装置および設計方法
12日前
株式会社フカデン
外周部加工システム
1か月前
株式会社デンソー
電子制御装置
22日前
株式会社FUJI
作業機の操作表示システム
2日前
株式会社ダイフク
物品搬送設備
12日前
東芝ライテック株式会社
管理システム
8日前
株式会社栗本鐵工所
触覚提示装置
2日前
日立建機株式会社
自律走行システム
1か月前
大阪瓦斯株式会社
二次圧制御機構
1か月前
大阪瓦斯株式会社
二次圧制御機構
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1日前
アズビル株式会社
診断システムおよび診断方法
8日前
ミツミ電機株式会社
半導体集積回路装置
2か月前
株式会社デンソー
移動体制御装置
1か月前
横河電機株式会社
電圧電流変換回路
2か月前
東レエンジニアリング株式会社
位置決め装置
2日前
株式会社日立製作所
制御装置、制御方法
1日前
株式会社デンソー
車両用電子制御装置
2か月前
株式会社ダイフク
搬送設備の検査装置
1か月前
トヨタ自動車株式会社
ソーラー充電システム
8日前
ローム株式会社
リニア電源回路
8日前
エンゼルグループ株式会社
無人搬送システム
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ