TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024177707
公報種別
公開特許公報(A)
公開日
2024-12-24
出願番号
2023095991
出願日
2023-06-12
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20241217BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】事前に消費量や残量等を確認し補給対応することで、効率的に燃料や資材を供給できる作業車両を提供することを目的とする。
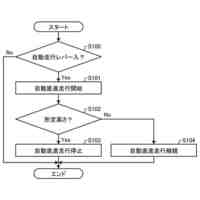
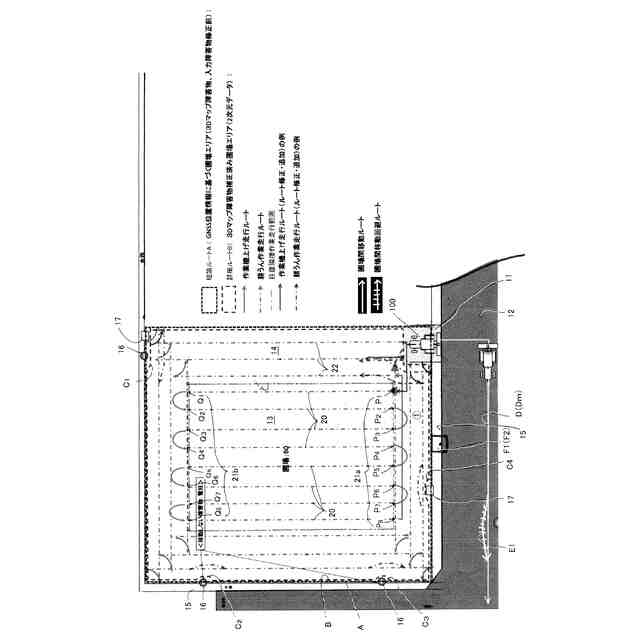
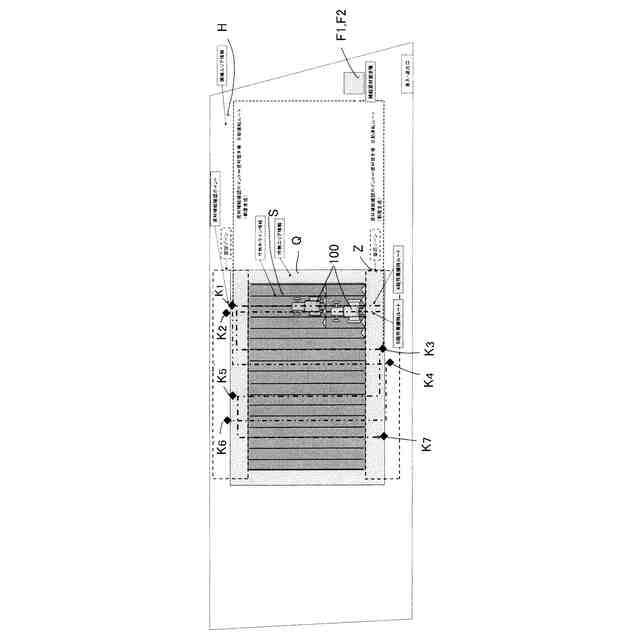
【解決手段】走行経路20,22を設定しこの経路に沿って無人運転可能な作業車両100において、走行経路20,22又はその近傍に燃料補給地点F1、資材補給地点F2を設定し、単位面積あたりの燃料消費量、資材消費量を演算管理し、現時点の燃料残量、資材残量と未作業面積における燃料消費量、資材消費量を算出し、当該作業終了までに燃料不足、資材不足と判定される場合は、各要求指示信号が出力される前であっても、走行経路20,22の中に組み込まれた燃料補給地点F1、資材補給地点F2で停止するよう構成した。
【選択図】 図5
特許請求の範囲
【請求項1】
走行経路(20,22)を設定しこの経路に沿って無人運転可能な作業車両(100)において、走行経路(20,22)又はその近傍に燃料補給地点(F1)を設定し、単位面積あたりの燃料消費量を演算管理し、現時点の燃料残量と未作業面積における燃料消費量を算出し、当該作業終了までに燃料不足と判定される場合は、燃料要求指示信号が出力される前であっても、走行経路(20,22)の中に組み込まれた燃料補給地点(F1)で停止するよう構成したことを特徴とする作業車両。
続きを表示(約 460 文字)
【請求項2】
走行経路(20,22)を設定しこの経路に沿って無人運転可能な作業車両(100)において、走行経路(20,22)又はその近傍に資材補給地点(F2)を設定し、単位面積あたりの資材消費量を演算管理し、現時点の資材残量と未作業面積における資材消費量を算出し、当該作業終了までに資材不足と判定される場合は、資材要求指示信号が出力される前であっても、走行経路(20,22)の中に組み込まれた資材補給地点(F2)で停止するよう構成したことを特徴とする作業車両。
【請求項3】
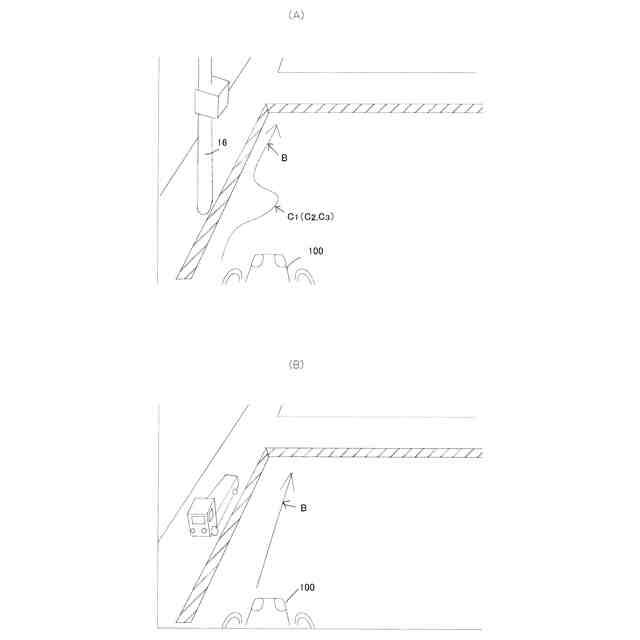
GNSS位置情報取得手段(102)と画像データ処理手段(305)を備え、GNSS位置情報によって圃場(H)エリアを取得し、この圃場(H)エリア内に作業種類や作業機に応じた理論ルート(A)を生成し、障害物等(11,16,17)の撮像データに基づいて回避必要ルート(C1,C2…)を生成して前記理論ルート(A)に合成し、ルート接続を行い自動運転ルートとしての詳細ルート(B)を生成する請求項1又は請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
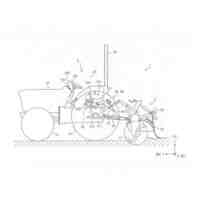
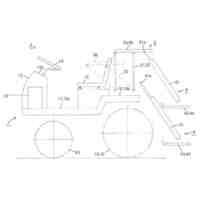
本発明は、農用トラクタのような作業車両に関し、特に自動運転経路の生成システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
作業車両において、作業対象領域を設定する領域設定部と、作業対象領域を網羅する走行経路を、読み出し可能に格納し、作業車両の走行中、収穫物の排出要求や燃料補給要求に基づいて、走行すべき走行経路を選択する構成が公知である(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2018-68284号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1によれば、作業車両の走行中、収穫物の排出要求や燃料補給要求に基づいて、走行すべき走行経路を選択することで、作業途中での走行経路を変更することができる。
【0005】
しかしながら、収穫物の排出要求や燃料補給の要求にて、設定された排出位置や補給位置に向かう経路を設定するが、引き返し等の無駄な走行経路になる可能性がある。特に資材補給では、予定された経路以外を走行したり、同じ経路を複数回走行はできない場合がある。
【0006】
本発明は、事前に燃料消費量や燃料残量等を確認し補給対応することで、上記の欠点解消できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決し目的を達成するために、請求項1に記載の発明は、走行経路20,22を設定しこの経路に沿って無人運転可能な作業車両100において、走行経路20,22又はその近傍に燃料補給地点F1を設定し、単位面積あたりの燃料消費量を演算管理し、現時点の燃料残量と未作業面積における燃料消費量を算出し、当該作業終了までに燃料不足と判定される場合は、燃料要求指示信号が出力される前であっても、走行経路20,22の中に組み込まれた燃料補給地点F1で停止するよう構成した。
【0008】
請求項2に記載の発明は、走行経路20,22を設定しこの経路に沿って無人運転可能な作業車両100において、走行経路20,22又はその近傍に資材補給地点F2を設定し、単位面積あたりの資材消費量を演算管理し、現時点の資材残量と未作業面積における資材消費量を算出し、当該作業終了までに資材不足と判定される場合は、作業車両100の資材要求指示信号が出力される前であっても、走行経路20,22の中に組み込まれた資材補給地点F2で停止するよう構成した。
【0009】
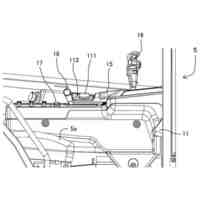
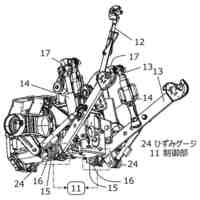
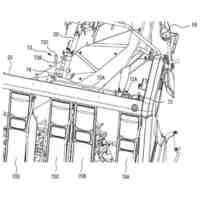
請求項3に記載の発明は、請求項1又は請求項2に記載の発明において、GNSS位置情報取得手段102と画像データ処理手段305を備え、GNSS位置情報によって圃場Hエリアを取得し、この圃場Hエリア内に作業種類や作業機に応じた理論ルートAを生成し、障害物等11,16,17の撮像データに基づいて回避必要ルートC1,C2…を生成して前記理論ルートAに合成し、ルート接続を行い自動運転ルートとしての詳細ルートBを生成する。
【発明の効果】
【0010】
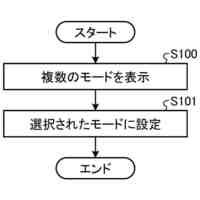
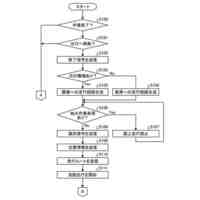
請求項1及び請求項2に記載の発明によれば、現時点の燃料残量又は資材残量と未作業領域演算手段とを備え、未作業領域の面積を演算して現時点の燃料残量又は資材残量で賄えるか否か判定し、燃料又は資材不足とされるときは、燃料又は資材要求指示信号が出力される以前であっても燃料補給地点F1又は資材補給地点F2で停止信号を出力して燃料又は資材補給するものであるから、圃場の単位面積の消費量を算出し、予定された作業経路終了まで燃料又は資材補給無しで可能か否かを判定し、事前に燃料又は資材補給を行うことによって、引き返し走行等の無駄な走行をなくすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
11日前
井関農機株式会社
収穫機
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
苗移植機
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
洗米炊飯装置
4日前
井関農機株式会社
農薬散布作業車
1か月前
井関農機株式会社
ロボット作業車両
1か月前
井関農機株式会社
ロボット作業車両
13日前
井関農機株式会社
作業車両の管理システム
1か月前
井関農機株式会社
ハイブリッドエンジン装置
1か月前
井関農機株式会社
SCRシステムおよび尿素水タンク
8日前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ