TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024178534
公報種別
公開特許公報(A)
公開日
2024-12-25
出願番号
2023096730
出願日
2023-06-13
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
F16H
61/02 20060101AFI20241218BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】運転者が主変速レバーの操作と機体の挙動とを把握しやすくなり、より安全に走行することができる作業車両を提供すること。
【解決手段】実施形態に係る作業車両は、エンジンの回転動力で走行する走行車体と、主変速レバーの操作に応じて無段階変速する主変速装置と、主変速レバーの操作位置およびエンジンの回転数を記憶する制御部と、主変速レバーの操作位置およびエンジンの回転数を記憶させる場合に押し操作される作業速メモリスイッチとを備え、制御部は、作業速メモリスイッチの長押しによって、主変速レバーの操作位置を記憶操作位置として記憶し、エンジンの回転数を記憶回転数として記憶し、作業速メモリスイッチの短押しによって、記憶操作位置における主変速の状態を再現する主変速再現モードを実行し、主変速再現モードにおいて、主変速レバーが記憶操作位置よりも高速側へ操作されても、記憶操作位置に応じた主変速の状態に保持する。
【選択図】図5
特許請求の範囲
【請求項1】
エンジンの回転動力で走行する走行車体と、主変速レバーの操作に応じて前記走行車体の走行速度を無段階に変速する主変速装置とを備える作業車両において、
前記主変速装置による主変速を制御するとともに、前記主変速レバーの操作位置および前記エンジンの回転数を記憶する制御部と、
前記主変速レバーの操作位置および前記エンジンの回転数を前記制御部に記憶させる場合に押し操作される作業速メモリスイッチと
を備え、
前記制御部は、
前記作業速メモリスイッチの所定時間以上の長押し操作によって、前記主変速レバーの操作位置を記憶操作位置として記憶し、かつ、前記エンジンの回転数を記憶回転数として記憶し、
前記作業速メモリスイッチの前記所定時間未満の短押し操作によって、前記記憶回転数を呼び出すとともに、前記記憶操作位置における主変速の状態を再現する主変速再現モードを実行し、
前記主変速再現モードにおいて、前記主変速レバーが前記記憶操作位置よりも高速側へ操作されても、前記記憶操作位置に応じた主変速の状態に保持する
ことを特徴とする作業車両。
続きを表示(約 1,800 文字)
【請求項2】
エンジンの回転動力で走行する走行車体と、主変速レバーの操作に応じて前記走行車体の走行速度を無段階に変速する主変速装置とを備える作業車両において、
前記主変速装置による主変速を制御するとともに、前記主変速レバーの操作位置および前記エンジンの回転数を記憶する制御部と、
前記主変速レバーの操作位置および前記エンジンの回転数を前記制御部に記憶させる場合に押し操作される作業速メモリスイッチと
を備え、
前記制御部は、
前記作業速メモリスイッチの所定時間以上の長押し操作によって、前記主変速レバーの操作位置を記憶操作位置として記憶し、かつ、前記エンジンの回転数を記憶回転数として記憶し、
前記作業速メモリスイッチの前記所定時間未満の短押し操作によって、前記記憶操作位置における主変速の状態を再現する主変速再現モードを実行し、
前記作業速メモリスイッチの前記短押し操作時において前記主変速レバーの操作位置が前記記憶操作位置と異なる位置へ操作されている場合、前記主変速レバーの操作位置が前記記憶操作位置と一致するまで前記主変速レバーの操作位置に応じて主変速を制御し、前記主変速レバーの操作位置が前記記憶操作位置と一致すると前記記憶回転数を呼び出し、
前記主変速再現モードにおいて、前記主変速レバーが前記記憶操作位置よりも高速側へ操作されても、前記記憶操作位置に応じた主変速の状態に保持する
ことを特徴とする作業車両。
【請求項3】
エンジンの回転動力で走行する走行車体と、主変速レバーの操作に応じて前記走行車体の走行速度を無段階に変速する主変速装置とを備える作業車両において、
前記主変速装置による主変速を制御するとともに、前記主変速レバーの操作位置および前記エンジンの回転数を記憶する制御部と、
前記主変速レバーの操作位置および前記エンジンの回転数を前記制御部に記憶させる場合に押し操作される作業速メモリスイッチと
を備え、
前記制御部は、
前記作業速メモリスイッチの所定時間以上の長押し操作によって、前記主変速レバーの操作位置を記憶操作位置として記憶し、かつ、前記エンジンの回転数を記憶回転数として記憶し、
前記作業速メモリスイッチの前記所定時間未満の短押し操作によって、前記記憶操作位置における主変速の状態を再現する主変速再現モードを実行し、
前記作業速メモリスイッチの前記短押し操作時において、前記主変速レバーの操作位置が前記記憶操作位置よりも低速側に操作されており、かつ、前記エンジンの回転数が前記記憶回転数よりも低回転である場合、前記主変速レバーの現在の操作位置から前記記憶操作位置への操作にあわせて前記エンジンの回転数を前記記憶回転数まで比例的に上げる
ことを特徴とする作業車両。
【請求項4】
前記制御部は、
前記作業速メモリスイッチの前記短押し操作時において、前記主変速レバーの操作位置が前記記憶操作位置よりも低速側に操作されており、かつ、前記エンジンの回転数が前記記憶回転数よりも高回転である場合、前記エンジンの回転数を下げる
ことを特徴とする請求項3に記載の作業車両。
【請求項5】
前記制御部は、
前記作業速メモリスイッチの前記短押し操作時において、前記主変速レバーの操作位置が前記記憶操作位置よりも高速側に操作されており、かつ、前記エンジンの回転数が前記記憶回転数よりも高回転である場合、前記主変速レバーの現在の操作位置から前記記憶操作位置への操作にあわせて前記エンジンの回転数を前記記憶回転数まで比例的に下げる
ことを特徴とする請求項3または4に記載の作業車両。
【請求項6】
運転者へ異常を報知する報知部
をさらに備え、
前記制御部は、
前記作業速メモリスイッチの前記短押し操作時において、前記主変速レバーの操作位置が前記記憶操作位置よりも高速側に操作されており、かつ、前記エンジンの回転数が前記記憶回転数よりも低回転である場合、前記報知部に報知させる
ことを特徴とする請求項5に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、機体の走行速度を無段階に変速する無段変速装置(主変速装置)と、主変速装置の変速位置を制御するアクチュエータとを備える作業車両において、変速位置を記憶すると、この後に別の変速位置へ操作されていても、変速位置再現スイッチの操作によって、記憶した変速位置をアクチュエータが自動で再現する技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-298099号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来技術では、変速位置の再現が困難な無段変速装置でも容易に変速位置を再現することができるものの、変速操作レバー(主変速レバー)の操作位置と実際の変速位置とが一致しない場合、運転者が主変速レバーの操作と機体の挙動とを把握しにくいことがあり、安全な走行の妨げとなるおそれがある。
【0005】
本発明は、上記に鑑みてなされたものであって、運転者が主変速レバーの操作と機体の挙動とを把握しやすくなり、より安全に走行することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
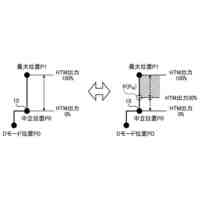
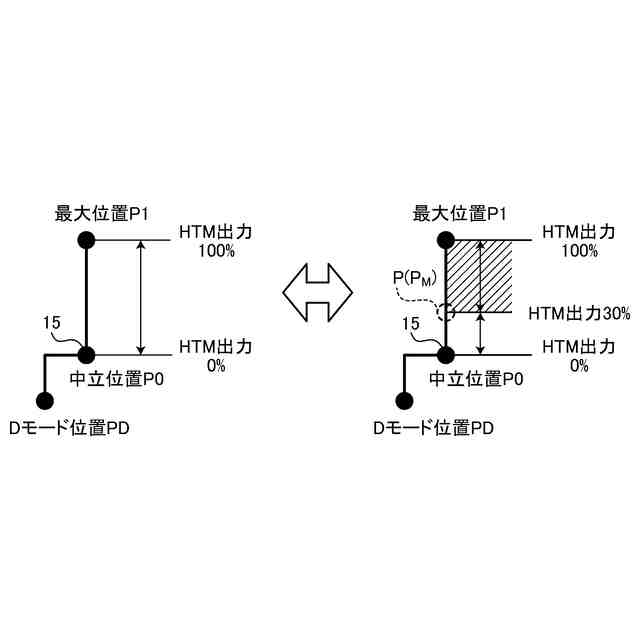
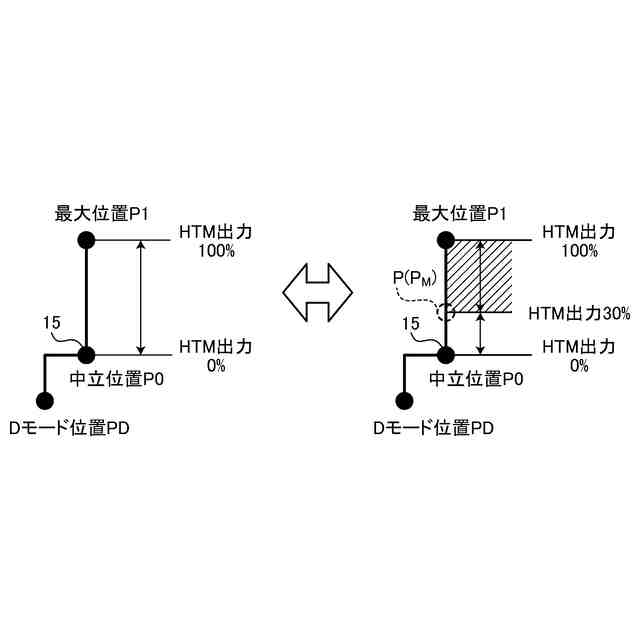
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両(1)は、エンジン(E)の回転動力で走行する走行車体(2)と、主変速レバー(15)の操作に応じて走行車体(2)の走行速度を無段階に変速する主変速装置(30)とを備える作業車両(1)において、主変速装置(30)による主変速を制御するとともに、主変速レバー(15)の操作位置(P)およびエンジン(E)の回転数を記憶する制御部(100)と、主変速レバー(15)の操作位置(P)およびエンジン(E)の回転数を制御部(100)に記憶させる場合に押し操作される作業速メモリスイッチ(56)とを備え、制御部(100)は、作業速メモリスイッチ(56)の所定時間以上の長押し操作によって、主変速レバー(15)の操作位置(P)を記憶操作位置(P
M
)として記憶し、かつ、エンジン(E)の回転数を記憶回転数として記憶し、作業速メモリスイッチ(56)の所定時間未満の短押し操作によって、記憶回転数を呼び出すとともに、記憶操作位置(P
M
)における主変速の状態を再現する主変速再現モードを実行し、主変速再現モードにおいて、主変速レバー(15)が記憶操作位置(P
M
)よりも高速側へ操作されても、記憶操作位置(P
M
)に応じた主変速の状態に保持する。
【発明の効果】
【0007】
実施形態に係る作業車両によれば、運転者が主変速レバーの操作と機体の挙動とを把握しやすくなり、より安全に走行することができる。
【図面の簡単な説明】
【0008】
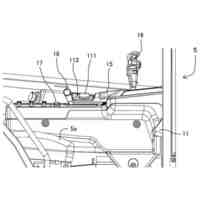
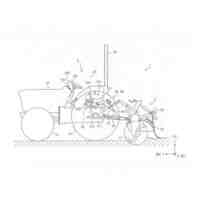
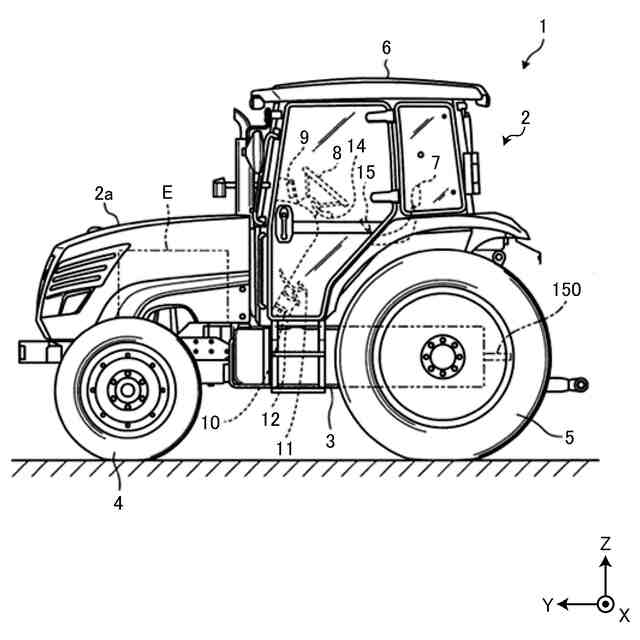
図1は、実施形態に係る作業車両を示す概略側面図である。
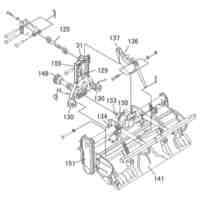
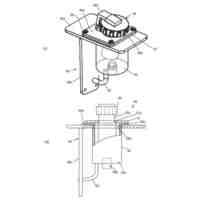
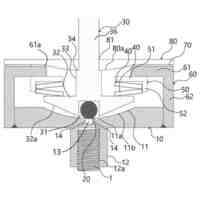
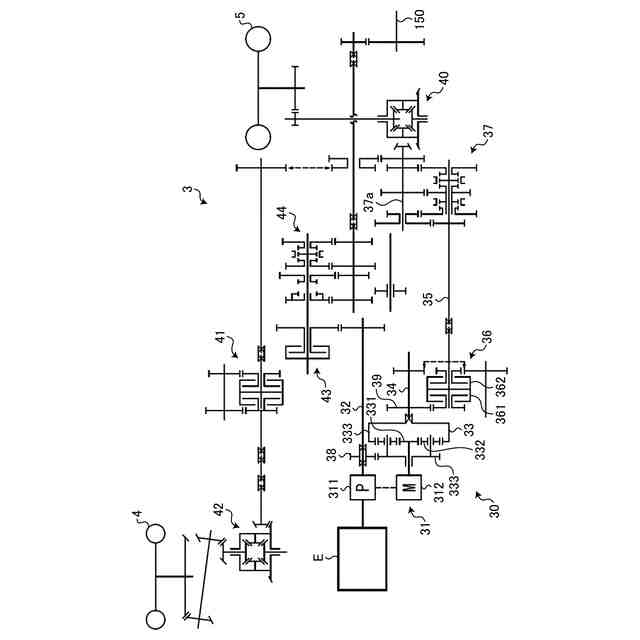
図2は、トランスミッションの構成を示す図である。
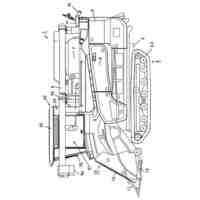
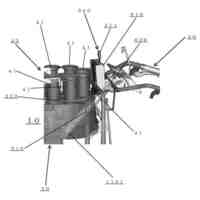
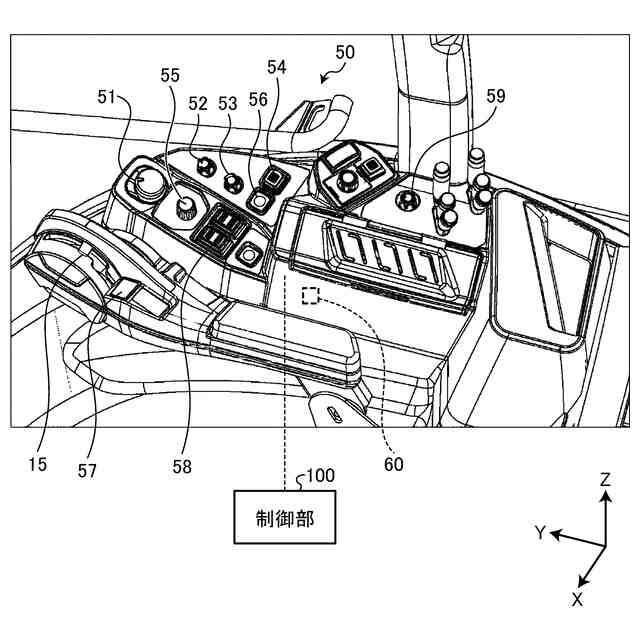
図3は、トラクタの操作部の説明図(その1)である。
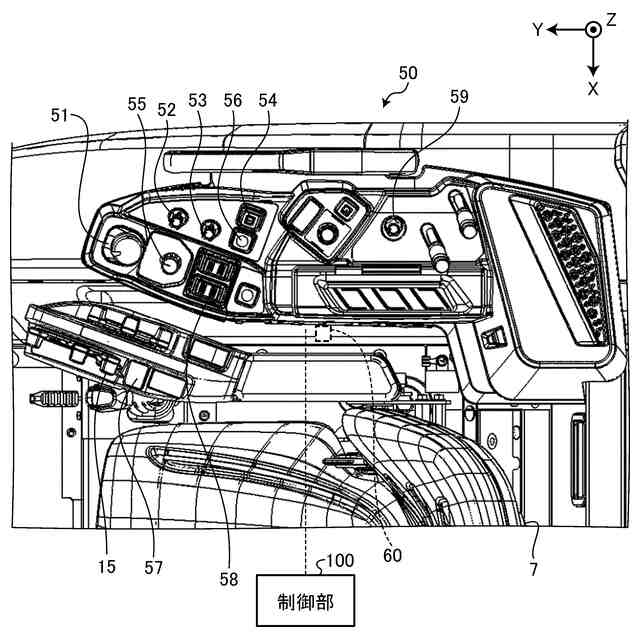
図4は、トラクタの操作部の説明図(その2)である。
図5は、主変速再現モードの概略説明図である。
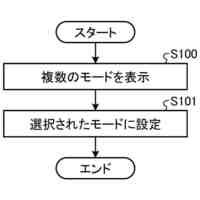
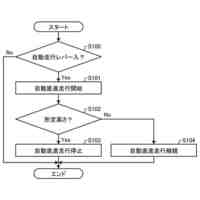
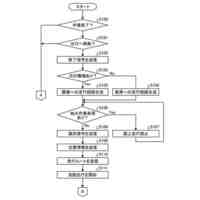
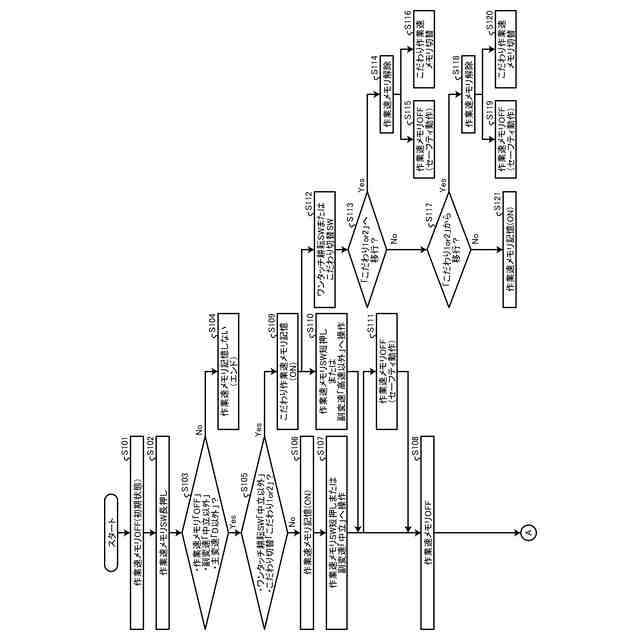
図6Aは、主変速再現モードの処理手順の一例を示すフローチャート(その1)である。
図6Bは、主変速再現モードの処理手順の一例を示すフローチャート(その1)である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両の概要>
まず、図1を参照して実施形態に係る作業車両1の概要について説明する。図1は、実施形態に係る作業車両1を示す概略側面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
11日前
井関農機株式会社
収穫機
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
苗移植機
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
洗米炊飯装置
4日前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
ロボット作業車両
13日前
井関農機株式会社
ロボット作業車両
1か月前
井関農機株式会社
ハイブリッドエンジン装置
1か月前
井関農機株式会社
SCRシステムおよび尿素水タンク
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
1か月前
個人
流路体
8日前
個人
クラッチ装置
12日前
個人
保持機
2か月前
個人
免震留具
2か月前
個人
振り子式免震装置
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ