TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024107241
公報種別
公開特許公報(A)
公開日
2024-08-08
出願番号
2024093244,2020209657
出願日
2024-06-07,2020-12-17
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20240801BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】遠隔操作を行う際に誤操作の発生を抑制することができる作業車両を提供する。
【解決手段】前輪を備え、前記前輪を操舵するステアリング装置を有し、圃場内を走行可能な走行車体と、前記ステアリング装置を制御する制御装置と、前記走行車体を遠隔操作するために、前記制御装置へ前記走行車体に対する走行信号を出力する遠隔操作装置とを備え、前記遠隔操作装置は、少なくとも4つの押しボタンを有し、4つの前記押しボタンのうち2つの前記押しボタンが同時に押下されることで前記走行車体の遠隔操作が可能であり、前記制御装置は、前記遠隔操作装置において同時に押下された2つの前記押しボタンの組み合わせに応じて、前記ステアリング装置の左右操舵を実行し、4つの前記押しボタンを単独で押下しても、前記ステアリング装置の左右操舵が実行されない。
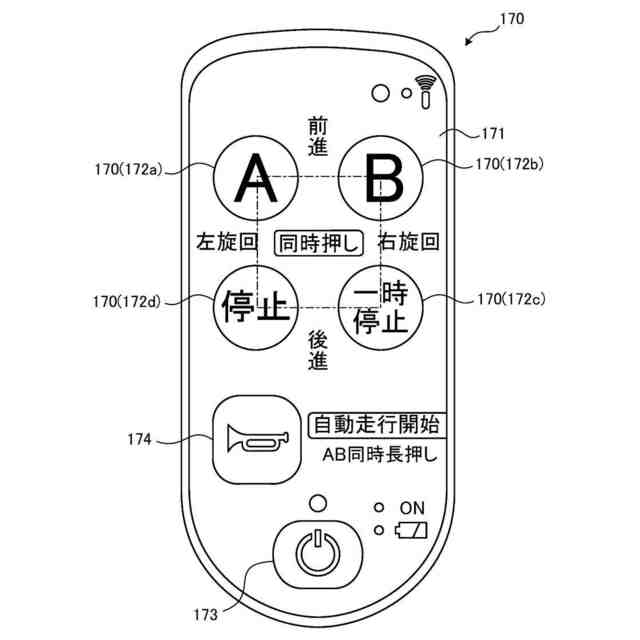
【選択図】 図4
特許請求の範囲
【請求項1】
前輪を備え、
前記前輪を操舵する
ステアリング装置を有し、圃場内を走行可能な走行車体と、
前記ステアリング装置を制御する制御装置と、
前記走行車体を遠隔操作するために、前記制御装置へ前記走行車体に対する走行信号を出力する遠隔操作装置と
を備え、
前記遠隔操作装置は、
少なくとも4つの押しボタンを有し、4つの前記押しボタンのうち2つの前記押しボタンが同時に押下されることで前記走行車体の遠隔操作が可能であり、
前記制御装置は、
前記遠隔操作装置において同時に押下された2つの前記押しボタンの組み合わせに応じて、前記ステアリング装置の左右操舵を実行
し、
4つの前記押しボタンを単独で押下しても、前記ステアリング装置の左右操舵が実行されないこと
を特徴とする作業車両。
続きを表示(約 450 文字)
【請求項2】
前記走行車体は、走行装置を有し、
前記制御装置は、
前記遠隔操作装置において同時に押下された2つの前記押しボタンの組み合わせに応じて、前記走行装置による前記走行車体の前後進を実行し、
4つの前記押しボタンを単独で押下しても、前記走行装置による前記走行車体の前後進が実行されないこと
を特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御装置は、
4つの前記押しボタンのうち前記走行車体を一時停止させる第3操作ボタンと、前記走行車体のエンジンを停止する第4操作ボタンを同時に押下されると前記走行装置による前記走行車体の後進を実行すること
を特徴とする請求項2に記載の作業車両。
【請求項4】
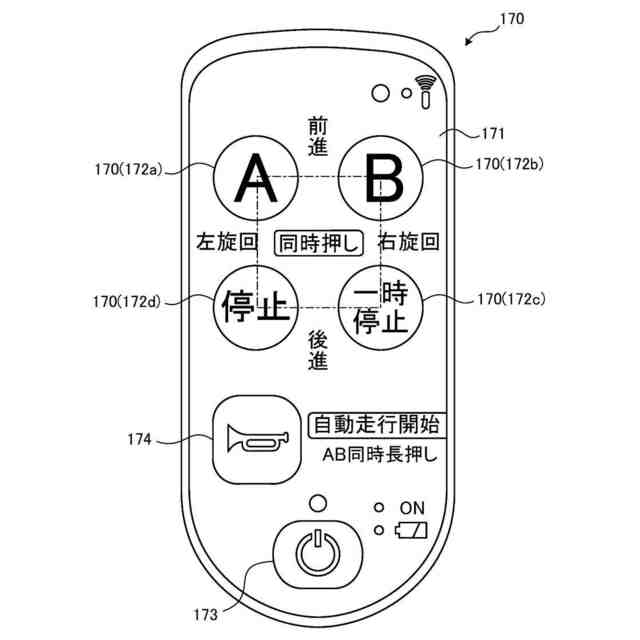
前記遠隔操作装置の操作面には、機体の前進、後進、左旋回および右旋回のそれぞれを示す表記が前記押しボタン以外の位置に施されていること
を特徴とする請求項1から3のいずれか一項に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、圃場で作業を行う作業車両には、走行車体の位置を測定しつつ自律走行するものがある。このような作業車両においては、圃場の端に沿って有人走行しながら走行軌跡を記録することで圃場形状を特定し、特定した圃場形状に沿って枕地領域を設定し、設定した枕地領域の内側に無人走行するための経路(作業経路)を設定し、設定した作業経路の終端を作業終了位置として設定する技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-133701号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記したような従来技術では、作業終了位置が圃場の端から枕地領域分内側にあるため、作業車両が作業終了位置に到達した後、すなわち、作業車両が無人走行を終了した後、この作業車両に作業者が再度乗り込むためには、圃場内に枕地領域分侵入して停車中の作業車両まで圃場内を歩かなければなら
ず不便であるため、無人の作業車両を遠隔操作できるようにすれば、作業者が圃場内にほとんど入ることなく乗り込むことができるが、遠隔操作は操作が容易であるがゆえに誤操作が発生する可能性があった。
【0005】
本発明は、上記に鑑みてなされたものであって、
遠隔操作を行う際に誤操作の発生を抑制すること
ができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両は、
前輪を備え、前記前輪を操舵する
ステアリング装置を有し、圃場内を走行可能な走行車体と、前記ステアリング装置を制御する制御装置と、前記走行車体を遠隔操作するために、前記制御装置へ前記走行車体に対する走行信号を出力する遠隔操作装置とを備え、前記遠隔操作装置は、少なくとも4つの押しボタンを有し、4つの前記押しボタンのうち2つの前記押しボタンが同時に押下されることで前記走行車体の遠隔操作が可能であり、前記制御装置は、前記遠隔操作装置において同時に押下された2つの前記押しボタンの組み合わせに応じて、前記ステアリング装置の左右操舵を実行
し、4つの前記押しボタンを単独で押下しても、前記ステアリング装置の左右操舵が実行されないこと
を特徴とする。
【発明の効果】
【0007】
実施形態に係る作業車両によれば、
遠隔操作を行う際に誤操作の発生を抑制すること
ができる。
【図面の簡単な説明】
【0008】
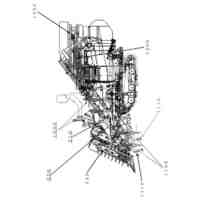
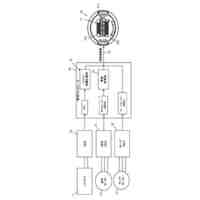
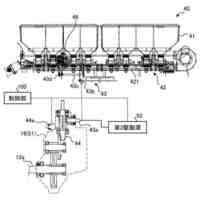
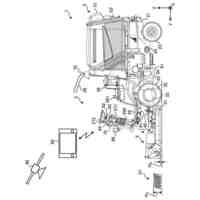
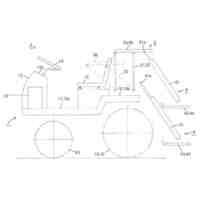
図1は、実施形態に係る作業車両を示す概略左側面図である。
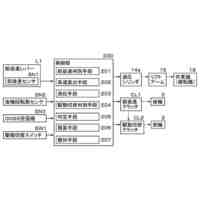
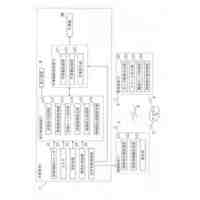
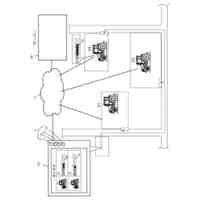
図2は、実施形態に係る作業車両の制御系の一例を示すブロック図である。
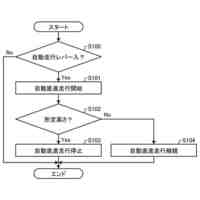
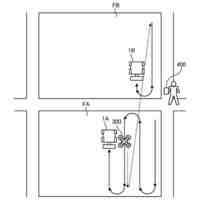
図3は、圃場内における自律走行の説明図である。
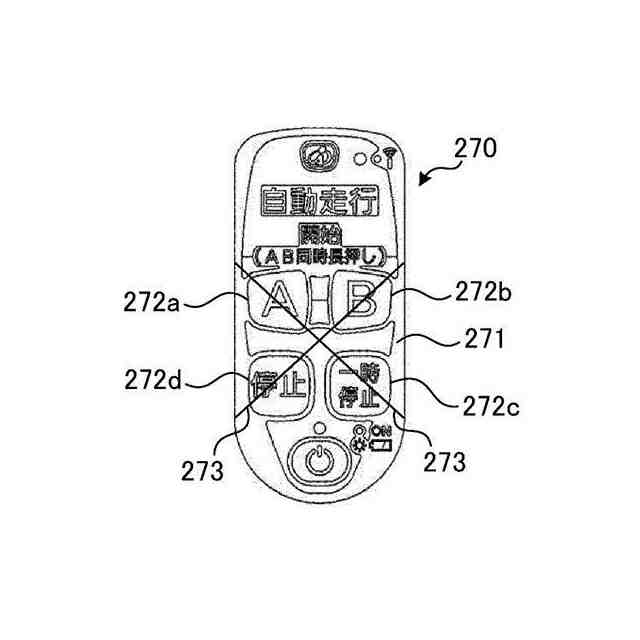
図4は、遠隔操作装置を示す正面図である。
図5Aは、機体の前進操作時に押下される押しボタンの説明図である。
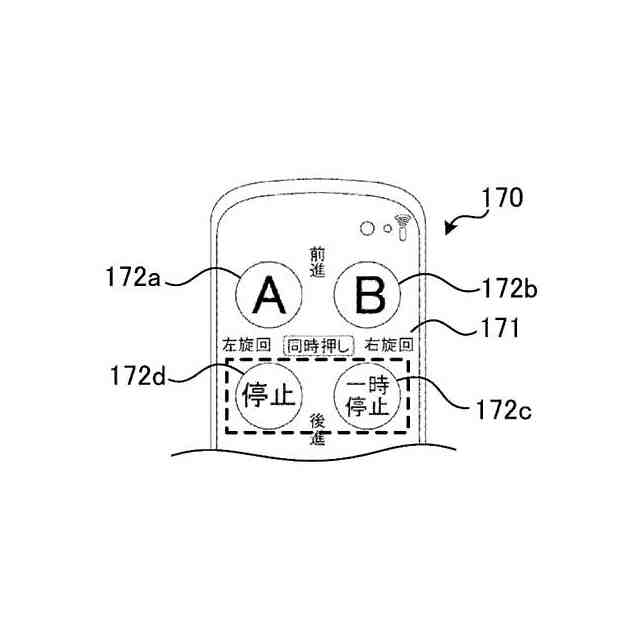
図5Bは、機体の後進操作時に押下される押しボタンの説明図である。
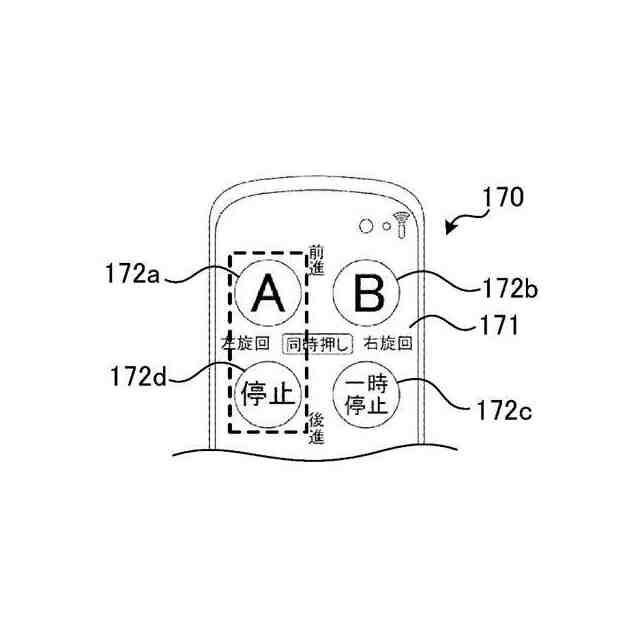
図5Cは、機体の左旋回操作時に押下される押しボタンの説明図である。
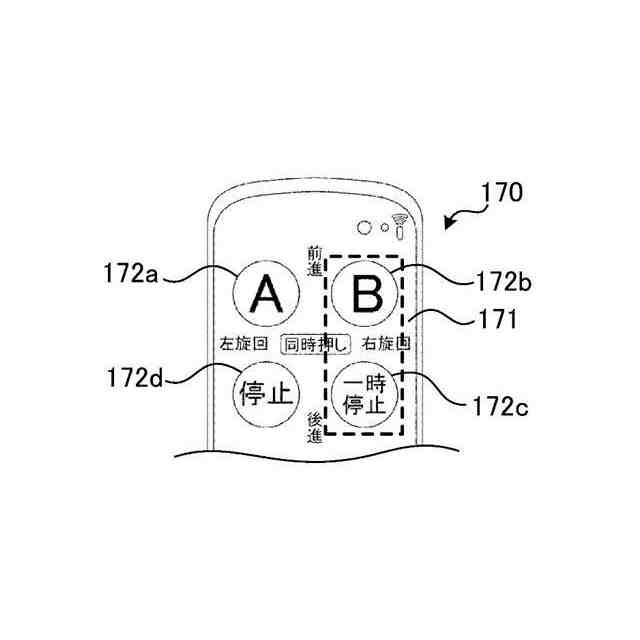
図5Dは、機体の右旋回操作時に押下される押しボタンの説明図である。
図6Aは、変形例(その1)に係る遠隔操作装置を示す正面図である。
図6Bは、変形例(その2)に係る遠隔操作装置を示す正面図である。
図6Cは、変形例(その3)に係る遠隔操作装置を示す正面図である。
図7は、変形例(その4)に係る遠隔操作装置を示す正面図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
<作業車両(トラクタ)の全体構成>
まず、図1を参照して実施形態に係る作業車両1の全体構成について説明する。図1は、実施形態に係る作業車両1を示す概略左側面図である。なお、以下では、作業車両1としてトラクタを例に説明する。また、作業車両であるトラクタ1は、自走しながら圃場で農作業を行う農用トラクタである。
【0010】
また、作業車両であるトラクタ1は、操縦者(作業者ともいう)が搭乗して圃場内を走行しながら所定の作業を実行する他、制御装置100を中心とする制御系による各部の制御により、圃場内を自律走行しながら所定の作業を実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業装置
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
乗用芝刈機
21日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
乗用型苗植機
20日前
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
汎用コンバイン
1か月前
井関農機株式会社
農薬散布作業車
29日前
井関農機株式会社
ロボット作業車両
今日
井関農機株式会社
ロボット作業車両
20日前
井関農機株式会社
作業管理システム
1か月前
井関農機株式会社
営農管理システム
1か月前
井関農機株式会社
作業機管理システム
1か月前
井関農機株式会社
作業車両の管理システム
29日前
井関農機株式会社
作業車のクローラ走行装置
1か月前
井関農機株式会社
ハイブリッドエンジン装置
20日前
株式会社タイワ精機
精米設備
1か月前
井関農機株式会社
作業車両
27日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ