TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024142110
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023054122
出願日
2023-03-29
発明の名称
制御装置、制御方法および制御プログラム
出願人
日立造船株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B62D
6/00 20060101AFI20241003BHJP(鉄道以外の路面車両)
要約
【課題】簡素な手法により操舵角を補正することができる。
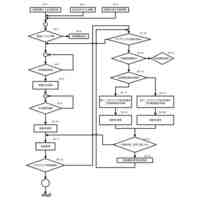
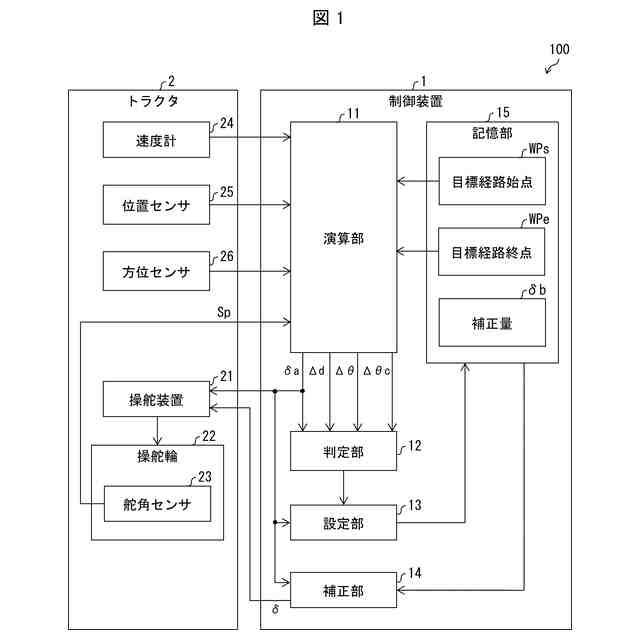
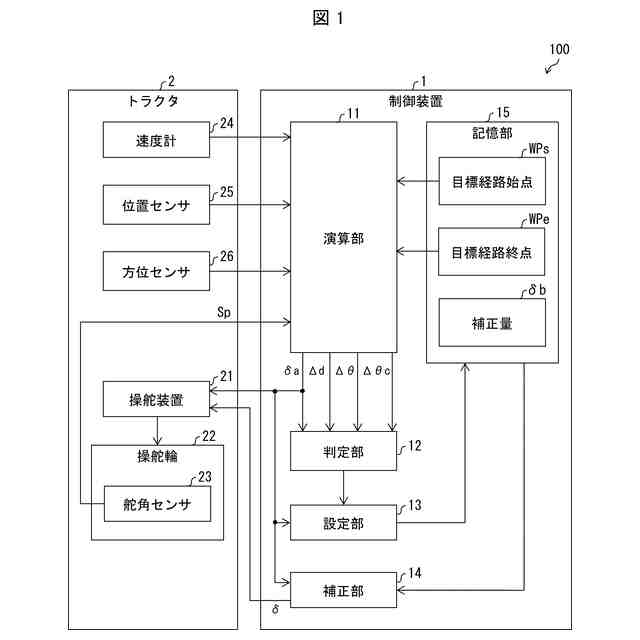
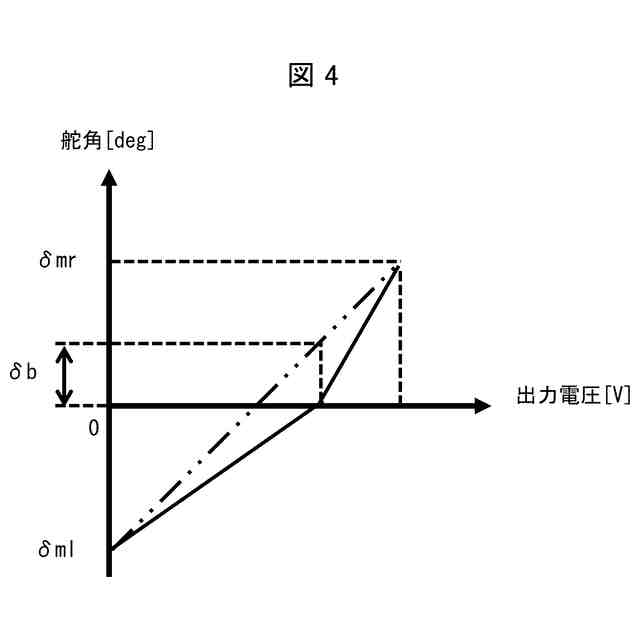
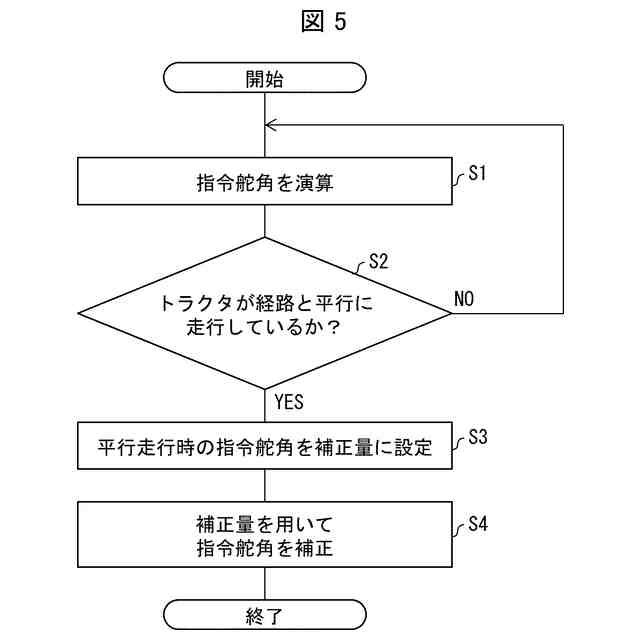
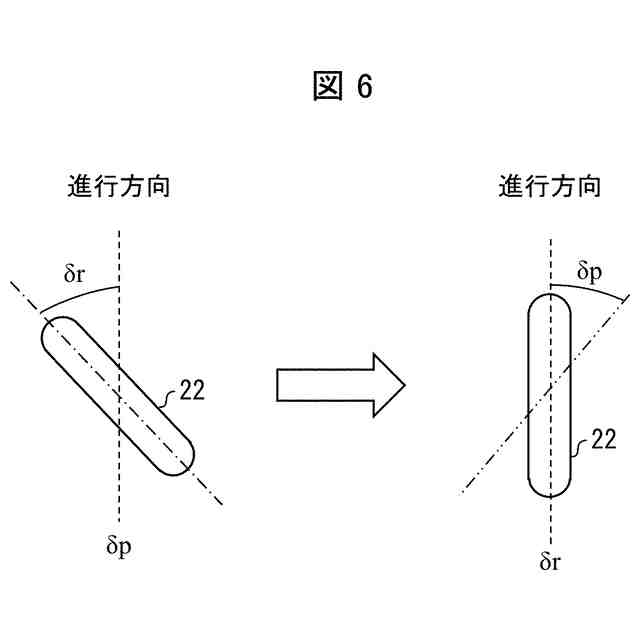
【解決手段】制御装置(1)は、トラクタ(2)の操舵輪(22)の計測された計測舵角が、車両が所定の経路を走行するための指令舵角(δa)に一致するように操舵輪(22)を操舵する操舵装置(21)に与える指令舵角を生成する。制御装置(1)は、経路に対するトラクタ(2)の位置に基づく偏差をなくすように指令舵角(δa)を演算する演算部(11)と、トラクタ(2)が指令舵角(δa)にしたがって走行している状態で、車両が経路と平行に走行しているか否かを判定する判定部(12)と、トラクタ(2)が経路と平行に走行していると判定されたときの指令舵角(δa)を補正量(δb)として設定する設定部(13)と、設定された補正量(δb)を指令舵角(δa)に加算することにより指令舵角(δa)を補正する補正部(14)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
車両の操舵輪の計測された計測舵角が、車両が所定の経路を走行するための指令舵角に一致するように前記操舵輪を操舵する操舵装置に与える前記指令舵角を生成する制御装置であって、
前記経路に対する前記車両の位置に基づく偏差をなくすように前記指令舵角を演算する演算部と、
前記車両が前記指令舵角にしたがって走行している状態で、前記車両が前記経路と平行に走行しているか否かを判定する判定部と、
前記車両が前記経路と平行に走行していると判定されたときの前記指令舵角を補正量として設定する設定部と、
設定された前記補正量を前記指令舵角に加算することにより前記指令舵角を補正する補正部と、を備える、制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記判定部は、
前記車両の重心から前記経路までの距離である距離偏差が一定値を維持していること、
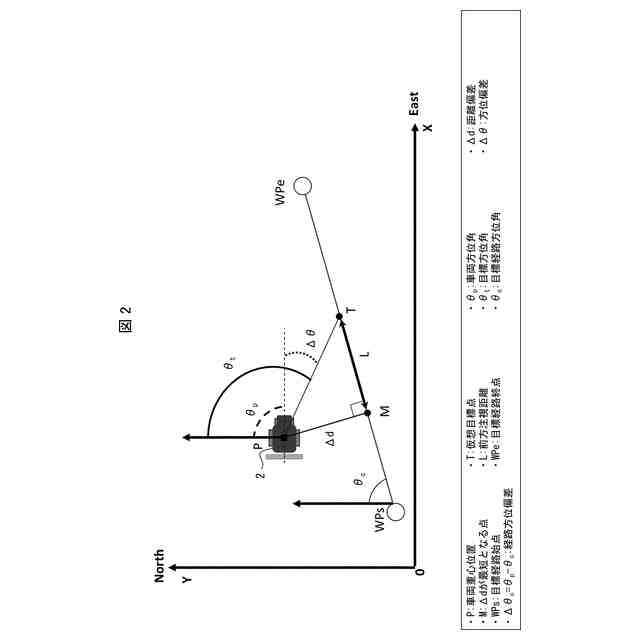
前記重心から前記距離を離れた前記経路上の点から前記経路を予め定められた注視距離だけ進んだ位置の仮想目標点と前記重心とを結ぶ線分と基準方向とがなす目標方位角と、前記基準方向に対する前記車両が正面を向く車両方位角との差である方位偏差が一定値を維持していること、
または、前記距離偏差および前記方位偏差が一定値を維持していることに基づいて、前記車両が前記経路と平行に走行していると判定する、請求項1に記載の制御装置。
【請求項3】
前記判定部は、
前記車両方位角と前記基準方向に対する前記経路の経路方位角との差である経路方位偏差と、
前記指令舵角と、
がそれぞれ一定値を維持していることに基づいて、前記車両が前記経路と平行に走行していると判定する、請求項2に記載の制御装置。
【請求項4】
前記判定部は、判定に用いる、前記距離偏差および前記方位偏差の標準偏差がそれぞれについて設けられた所定の閾値以下となるときに、判定に用いる、前記距離偏差および方位偏差のそれぞれが一定値を維持していると判定する、請求項2に記載の制御装置。
【請求項5】
前記設定部は、前記判定部による判定に用いられる、前記距離偏差および前記方位偏差の標準偏差がそれぞれ前記閾値以下となるときの所定数の前記指令舵角を取得し、かつその平均値を前記補正量として設定する、請求項4に記載の制御装置。
【請求項6】
前記判定部は、前記車両が走行開始から所定時間後に前記標準偏差を計算する、請求項4に記載の制御装置。
【請求項7】
前記判定部は、基準方向に対して前記車両が正面を向く方位の角度である車両方位角と基準方向に対する前記経路の経路方位角との差である経路方位偏差が0°付近を維持していることに基づいて、前記車両が前記経路と平行に走行していると判定する、請求項1に記載の制御装置。
【請求項8】
前記判定部は、前記車両が前記経路と平行に走行しているか否かを判定しているときに前記車両が停止したことを認識すると判定結果を無効にする、請求項3から7のいずれか1項に記載の制御装置。
【請求項9】
請求項1項に記載の制御装置としてコンピュータを機能させるための制御プログラムであって、前記演算部、前記判定部、前記設定部および前記補正部としてコンピュータを機能させるための制御プログラム。
【請求項10】
車両の操舵輪の計測された計測舵角が、車両が所定の経路を走行するための指令舵角に一致するように前記操舵輪を操舵する操舵装置に与える前記指令舵角を生成する制御方法であって、
前記経路に対する前記車両の位置に基づく偏差をなくすように前記指令舵角を演算する演算工程と、
前記車両が前記指令舵角にしたがって走行している状態で、前記車両が前記経路と平行に走行していることを判定する判定工程と、
前記車両が前記経路と平行に走行していると判定されたときの前記指令舵角を補正量として設定する設定工程と、
設定された前記補正量を前記指令舵角に加算することにより前記指令舵角を補正する補正工程と、を含む、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の自動操舵を制御する制御装置等に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
トラクタ等の作業車両を自律走行させるための自動操舵の技術が知られている。自動操舵制御装置は、作業車両が目標の経路を走行するように、操舵輪の舵角を指令値と一致させる。
【0003】
自動操舵を高精度に行うためには、操舵輪の舵角を正確に計測することが必要となる。しかしながら、計測された舵角と実際の舵角との間に何らかの原因によって差が生じていると、操舵制御を正確に行うことができない。
【0004】
例えば、特許文献1には、自律走行中に現在位置から進行方向側に一定距離をあけた目標経路上に注視点を設定し、現在位置から注視点にわたる線分を生成して、目標経路と線分とがなす角度を舵角誤差として演算することが記載されている。この舵角誤差を目標操舵角に加算することにより、操舵角が補正される。
【先行技術文献】
【特許文献】
【0005】
特開2019-53471号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、舵角誤差を求めるには、注視点の設定、現在位置から注視点にわたる線分の生成、および目標経路と線分とがなす角度の演算という処理が必要となる。
【0007】
本発明の一態様は、簡素な手法により操舵角を補正することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明の一態様に係る制御装置は、車両の操舵輪の計測された計測舵角が、車両が所定の経路を走行するための指令舵角に一致するように前記操舵輪を操舵する操舵装置に与える前記指令舵角を生成する制御装置であって、前記経路に対する前記車両の位置に基づく偏差をなくすように前記指令舵角を演算する演算部と、前記車両が前記指令舵角にしたがって走行している状態で、前記車両が前記経路と平行に走行しているか否かを判定する判定部と、前記車両が前記経路と平行に走行していると判定されたときの前記指令舵角を補正量として設定する設定部と、設定された前記補正量を前記指令舵角に加算することにより前記指令舵角を補正する補正部と、を備える。
【0009】
上記の課題を解決するために、本発明の一態様に係る制御方法は、車両の操舵輪の計測された計測舵角が、車両が所定の経路を走行するための指令舵角に一致するように前記操舵輪を操舵する操舵装置に与える前記指令舵角を生成する制御方法であって、前記経路に対する前記車両の位置に基づく偏差をなくすように前記指令舵角を演算する演算工程と、前記車両が前記指令舵角にしたがって走行している状態で、前記車両が前記経路と平行に走行していることを判定する判定工程と、前記車両が前記経路と平行に走行していると判定されたときの前記指令舵角を補正量として設定する設定工程と、
設定された前記補正量を前記指令舵角に加算することにより前記指令舵角を補正する補正工程と、を含む。
【発明の効果】
【0010】
本発明の一態様によれば、簡素な手法により操舵角を補正することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車の傘
8か月前
個人
サドル揺動装置
10か月前
個人
重量物移動台車
5か月前
個人
二輪バイク補助輪
11か月前
個人
車両用横転防止装置
7か月前
井関農機株式会社
作業機
7か月前
個人
自転車
12か月前
個人
自転車用荷台
2か月前
井関農機株式会社
作業機
9か月前
三甲株式会社
保護具
7か月前
個人
クリアレインシェード
6か月前
井関農機株式会社
作業車両
4か月前
日本精機株式会社
表示装置
8か月前
個人
ステアリングの操向部材
2か月前
株式会社北誠商事
被覆構造体
8か月前
株式会社ホシプラ
台車
6か月前
個人
自転車の駐輪装置
12か月前
個人
スライドレインプルーフ
5か月前
株式会社クラベ
面状ユニット
5か月前
三甲株式会社
台車
8か月前
帝人株式会社
車両構造体
4か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
1か月前
三甲株式会社
台車
1か月前
祖峰企画株式会社
平台車
3か月前
個人
足踏みペダル式自転車
4か月前
ダイハツ工業株式会社
車両
17日前
豊田合成株式会社
ハンドル
12か月前
豊田合成株式会社
ハンドル
5か月前
豊田合成株式会社
ハンドル
9か月前
井関農機株式会社
作業車両
9か月前
井関農機株式会社
走行車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
株式会社オカムラ
カート装置
5か月前
株式会社オカムラ
カート装置
5か月前
アルインコ株式会社
運搬台車
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ