TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024137078
公報種別
公開特許公報(A)
公開日
2024-10-07
出願番号
2023048448
出願日
2023-03-24
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20240927BHJP(信号)
要約
【目的】減速制御に関する情報を運転者に提供する際、当該運転者に違和感を生じさせることを抑制できる。車両制御装置を提供する。
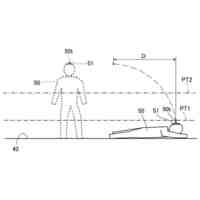
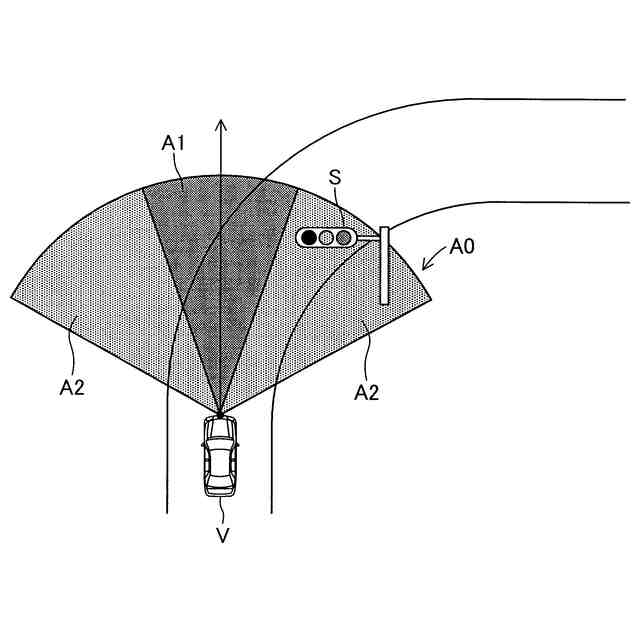
【解決手段】 プロセッサは、自車両を減速させる第一条件及び第二条件が重複して成立し、前記第一条件の成立を契機とした減速制御を優先的に実行している状況下で、前記第一条件の成立に関与する第一物標が、自車両の前方センサの検知領域のうち、自車両の前方へ延びる特定領域であって、自車両の運転者が視認可能な領域として設定された特定領域の外側に位置し、且つ、前記第二条件の成立に関与する第二物標が、前記前方センサの検知領域のうち、前記特定領域の内側に位置している場合に、前記第二物標についての第二情報を画像表示装置に表示させ、前記第一物標についての第一情報を前記画像表示装置に表示させない。
【選択図】 図2B
特許請求の範囲
【請求項1】
自車両の前方に存在する物標に関する情報を取得する前方センサと、
自車両の走行状態に関する情報を取得する車両センサと、
画像を表示する画像表示装置と、
前記前方センサ及び前記車両センサから取得した情報に基づいて、自車両を減速させる所定の減速条件が成立したことを検知した場合に、自車両を減速させる減速制御を実行するとともに、前記減速条件の成立に関与する物標についての情報を前記画像表示装置に表示させる画像表示制御を実行するプロセッサと、
を備えた車両制御装置であって、
前記プロセッサは、自車両を減速させるための第一条件及び第二条件が重複して成立し、前記第一条件の成立を契機とした減速制御を優先的に実行している状況下で、前記第一条件の成立に関与する第一物標が、前記前方センサの検知領域のうち自車両の運転者が視認可能な領域として設定された特定領域の外側に位置し、且つ、前記第二条件の成立に関与する第二物標が前記特定領域の内側に位置している場合に、前記第二物標についての第二情報を前記画像表示装置に表示させ、前記第一物標についての第一情報を前記画像表示装置に表示させない、
ように構成された車両制御装置。
続きを表示(約 690 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記プロセッサは、
前記第一条件が単独で成立している場合に、自車両の速度の第一目標値を決定し、自車両の実速度が前記第一目標値に一致するように自車両を制御する第一減速制御を実行し、
前記第二条件が単独で成立している場合に、自車両の速度の第二目標値を決定し、自車両の実速度が前記第二目標値に一致するように自車両を制御する第二減速制御を実行し、
前記第一条件及び前記第二条件が重複して成立している場合であって、前記第一目標値が前記第二目標値以下である場合、前記第一減速制御を実行する、ように構成された車両制御装置。
【請求項3】
請求項1又は請求項2に記載の車両制御装置において、
前記第一条件は、自車両と先行車両との相対位置及び相対速度が、所定の条件を満たす場合に成立し、
前記第二条件は、自車両とカーブ路との相対位置及び当該カーブ路のカーブ半径に基づいて決定される自車両の速度の目標値と自車両の実速度との関係が所定の条件を満たす場合に成立する、
車両制御装置。
【請求項4】
請求項3に記載の車両制御装置において、
前記第一物標は、前記先行車両であり、
前記第二物標は、前記カーブ路である、
車両制御装置。
【請求項5】
請求項4に記載の車両制御装置において、
前記第一情報は、前記先行車両を表す画像であり、
前記第二物標は、前記カーブ路を表す画像である、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の条件が成立した場合に自車両を自動的に減速させる自動制動制御を実行中に、当該条件の成立に関与した物標に関する情報を表示する車両制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
所定の条件が成立した場合に自車両を自動的に減速させる自動制動制御を実行中に、当該条件の成立に関与した情報を表示する車両制御装置が提案されている(例えば、下記特許文献1を参照。)。特許文献1に記載の車両制御装置(以下、「従来装置」と称呼する。)は、表示装置及びプロセッサを備える。プロセッサは、自車両の前方の信号機の灯火色が「赤」であることを認識すると、自車両を減速させるための条件(第一条件)が成立したと判定する。この場合、プロセッサは、自車両を信号機の手前にて停止させるための減速制御を開始するとともに、第一条件の成立に関与した物標である信号機を表す画像を、表示装置に表示させる。また、プロセッサは、自車両の前方を他車両(先行車両)が走行していることを認識すると、自車両を減速させるための条件(第二条件)が成立したと判定する。この場合、当該他車両との衝突を回避するための減速制御を開始するとともに、当該第二条件の成立に関与した物標である先行車両を表す画像(アイコン)を表示装置に表示させる。
【先行技術文献】
【特許文献】
【0003】
特開2021-133777号公報
【発明の概要】
【0004】
従来装置のように、減速制御を実行するための複数種類の条件が予め規定されている場合、互いに異なる2つの条件が重複して(同時に)成立する状況が起こり得る。例えば、車載センサによる第一物標の検知を契機として第一条件が成立し、且つ、車載センサによる第二物標の検知を契機として第二条件が成立する状況が想定される。このような状況では、表示装置には第一物標及び第二物標を示す画像が表示されることになる。しかし、運転者が第一物標を視認でき、第二物標を視認できていない場合には、表示された第二物標が何を意味するのかを運転者が把握できない。そのため運転者に違和感を生じさせる虞がある。
【0005】
本発明の目的の一つは、減速制御に関する情報を運転者に提供する際、当該運転者に違和感を生じさせることを抑制できる、車両制御装置を提供することである。
【0006】
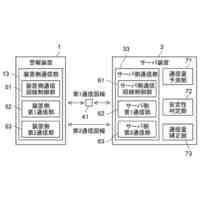
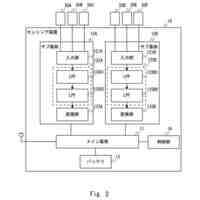
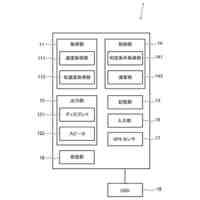
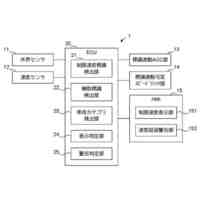
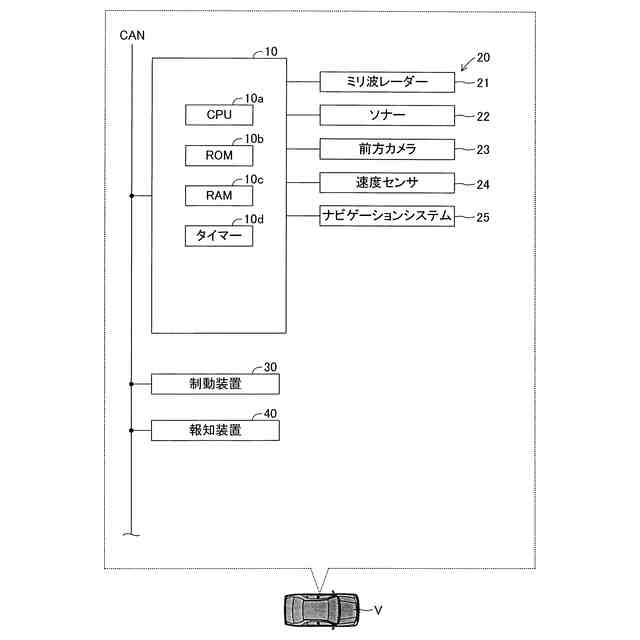
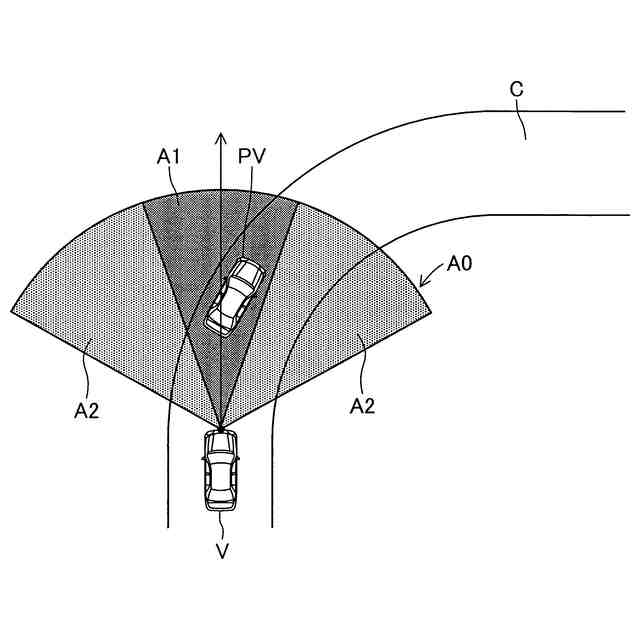
上記の目的を達成するために、本発明の車両制御装置(1)は、自車両(V)の前方に存在する物標に関する情報を取得する前方センサ(21、22、23)と、自車両の走行状態に関する情報(vs)を取得する車両センサ(24)と、画像を表示する画像表示装置(40)と、前記前方センサ及び前記車両センサから取得した情報に基づいて、自車両を減速させるための所定の減速条件(X1、X1a、X2)が成立したことを検知した場合に、自車両を減速させる減速制御を実行するとともに、前記減速条件の成立に関与した物標についての情報を前記画像表示装置に表示させる画像表示制御を実行するプロセッサ(10)と、を備える。
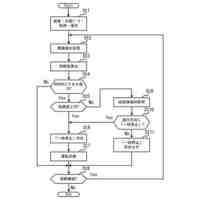
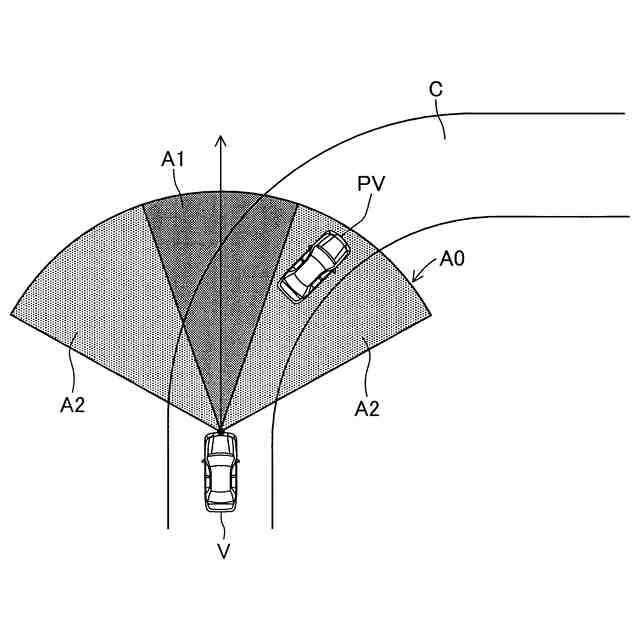
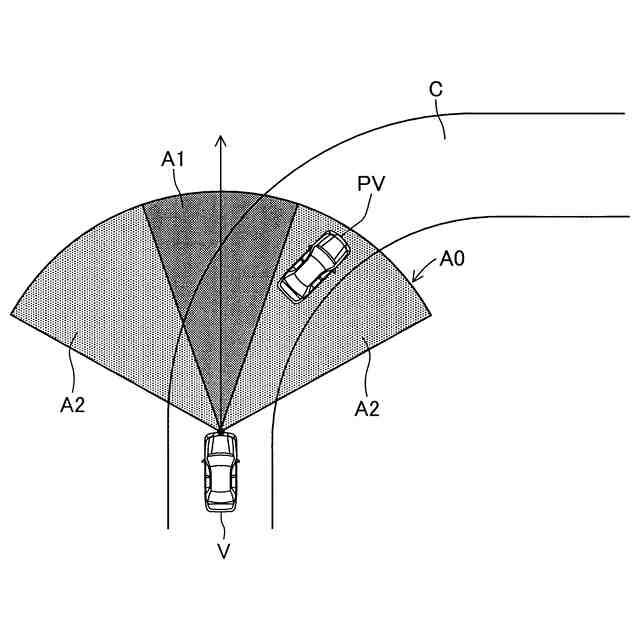
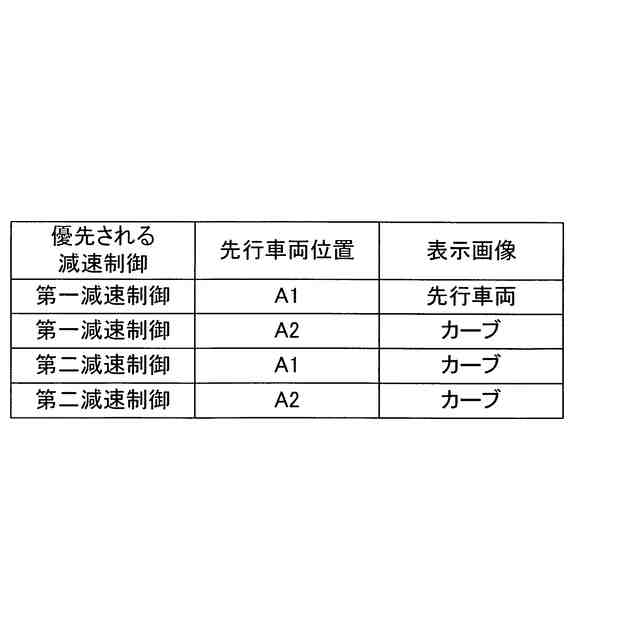
前記プロセッサは、自車両を減速させるための第一条件及び第二条件が重複して成立し、前記第一条件の成立を契機とした減速制御を優先的に実行している状況下で、前記第一条件の成立に関与する第一物標が、前記前方センサの検知領域(A0)のうち、自車両の前方へ延びる特定領域であって、自車両の運転者が視認可能な領域として設定された特定領域(A1)の外側(A2)に位置し、且つ、前記第二条件の成立に関与する第二物標が、前記前方センサの検知領域のうち、前記特定領域の内側に位置している場合に、前記第二物標についての第二情報を前記画像表示装置に表示させ、前記第一物標についての第一情報を前記画像表示装置に表示させない、ように構成される。
【0007】
第一条件及び第二条件が重複して成立し、プロセッサが第一減速制御を優先的に実行している状況であって、第一物標が特定領域外に位置し、且つ第二物標が特定領域内に位置している状況が想定される。この状況下では、運転者が第一物標を視認し難いが、第二部票を視認し易い可能性が高い。そこで、プロセッサは、第一条件の成立に関与した第一物標を表す画像を表示させるのではなく、第二条件の成立に関与した第二物標を表す画像を表示させる。よって、本発明に係る車両制御装置によれば、減速制御に関する情報を運転者に提供する際、当該運転者に違和感を生じさせることを抑制できる。また、第一条件及び第二条件が重複して成立している状況下で、第一物標及び第二物標に関する画像を同時に表示する場合には比較的広い表示領域が必要である。これに対し、本発明に係る車両制御装置は、一方の画像(運転者が視認し易い物標の画像)を表示させるだけなので、広い表示領域は不要である。
【0008】
本発明の一態様に係る車両制御装置において、
前記プロセッサは、
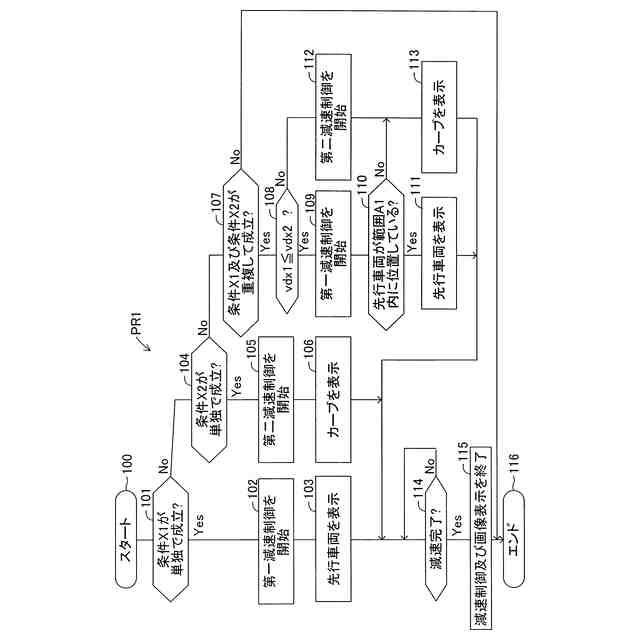
前記第一条件が単独で成立している場合に、自車両の速度の第一目標値(vdx1)を決定し、自車両の実速度が前記第一目標値に一致するように自車両を制御する第一減速制御を実行し、
前記第二条件が単独で成立している場合に、自車両の速度の第二目標値(vdx2)を決定し、自車両の実速度が前記第二目標値に一致するように自車両を制御する第二減速制御を実行し、
前記第一条件及び前記第二条件が重複して成立している場合であって、前記第一目標値が前記第二目標値以下である場合、前記第一減速制御を実行する。
【0009】
これによれば、第一条件及び第二条件が重複して成立していて、第一目標値が第二目標値以下である場合に、第一減速制御を優先的に実行させることができる。
【0010】
本発明の他の態様に係る車両制御装置において、
前記第一条件は、自車両と先行車両(PV)との相対位置及び相対速度が、所定の条件を満たす場合に成立し、
前記第二条件は、自車両とカーブ路(C)との相対位置及び当該カーブ路のカーブ半径に基づいて決定される自車両の速度の目標値(vdx2)と自車両の実速度(vs)との関係が所定の条件を満たす場合に成立する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
防犯砂利システム
1か月前
日本精機株式会社
表示システム
1か月前
個人
警報装置付きフェイスガード
1か月前
大阪瓦斯株式会社
警報装置
3日前
日本精機株式会社
盗難防止システム
2か月前
個人
音による速度計及びプログラム
1か月前
ニッタン株式会社
発信機
1か月前
株式会社大林組
誘導装置
2日前
ニッタン株式会社
発信機
1か月前
ホーチキ株式会社
通報システム
9日前
株式会社SUBARU
車載装置
3日前
株式会社小糸製作所
転倒検知装置
9日前
合同会社Gugenka
防犯装置
1か月前
ニッタン株式会社
煙感知器
3日前
加藤電機株式会社
車両用警報装置
1か月前
能美防災株式会社
発信機
1か月前
株式会社大林組
監視システム
23日前
株式会社JVCケンウッド
警告装置
1か月前
大阪瓦斯株式会社
音声出力システム
3日前
大阪瓦斯株式会社
音声出力システム
3日前
大阪瓦斯株式会社
音声出力システム
3日前
大阪瓦斯株式会社
音声出力システム
3日前
大阪瓦斯株式会社
音声出力システム
3日前
綜合警備保障株式会社
警備システム
2日前
株式会社日本製鋼所
センシング装置
10日前
トヨタ自動車株式会社
情報処理装置
2か月前
株式会社ブリッツ
車両情報処理装置
5日前
株式会社SUBARU
運転支援装置
2日前
ニッタン株式会社
火災感知端末
2日前
トヨタ自動車株式会社
警告装置
1か月前
トヨタ自動車株式会社
通信装置
9日前
ニッタン株式会社
感知器ベース
1か月前
ニッタン株式会社
火災感知端末
4日前
常盤電業株式会社
表示機、信号機
1か月前
株式会社日立国際電気
防災無線システム
13日前
能美防災株式会社
防災表示盤
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ