TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024136304
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023047385
出願日
2023-03-23
発明の名称
転倒検知装置
出願人
株式会社小糸製作所
代理人
個人
主分類
G08B
21/02 20060101AFI20240927BHJP(信号)
要約
【課題】 誤検知を低減し得る転倒検知装置を提供する。
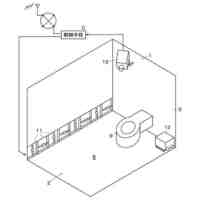
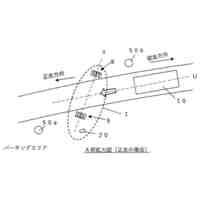
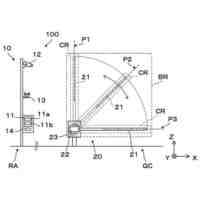
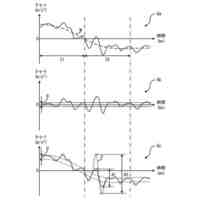
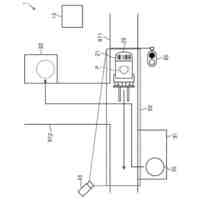
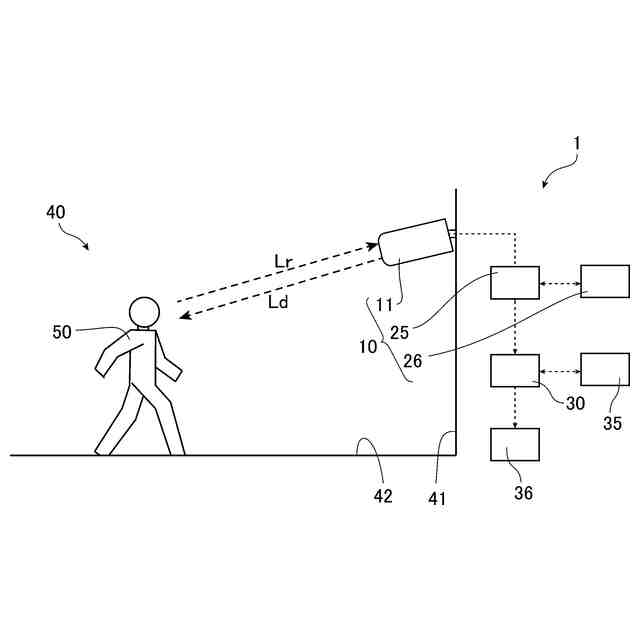
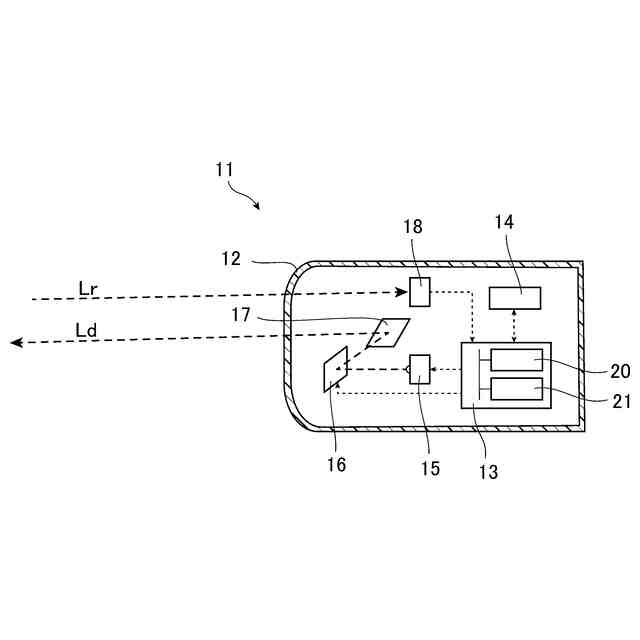
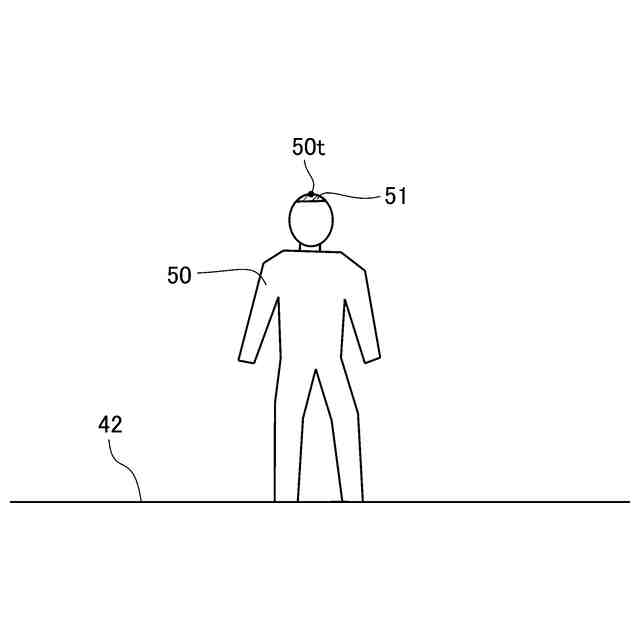
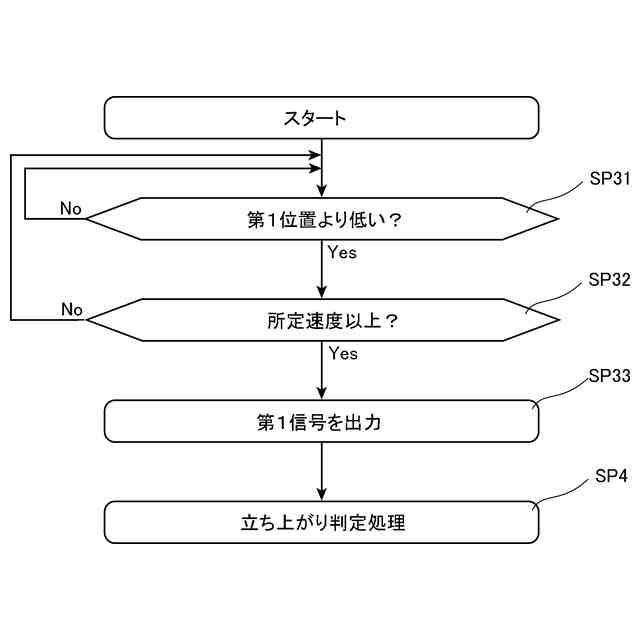
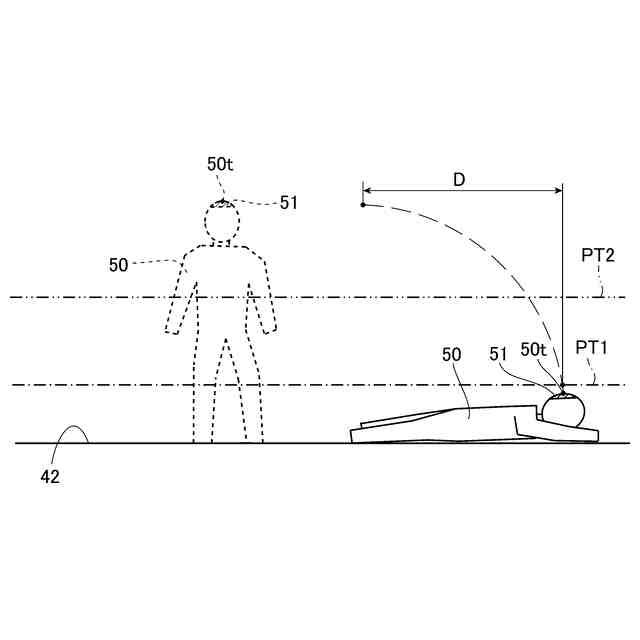
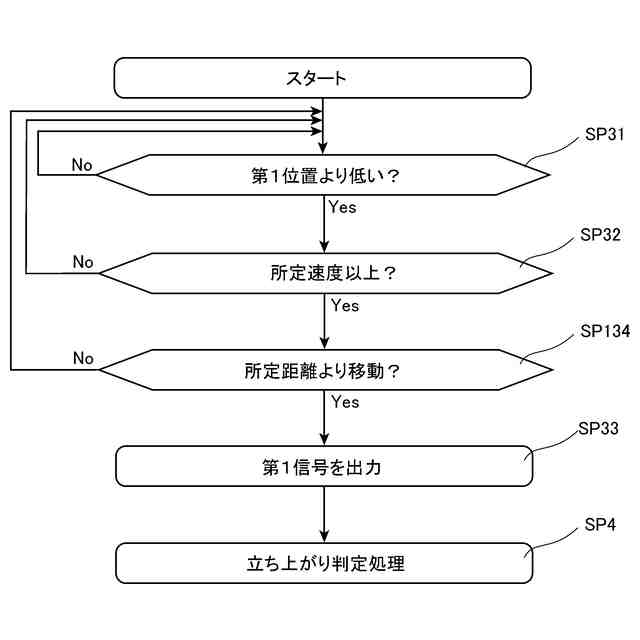
【解決手段】 転倒検知装置1は、検査領域40内の人を移動体50として検知可能なLiDAR装置10と、LiDAR装置10で検知される移動体50の最上部51が下方に移動し、下方に移動する直前の最上部51の位置より低い第1位置PT1より最上部51が低くなり、最上部51が第1位置PT1より低くなるタイミングでの最上部51の下方に向かう速度が所定速度以上である場合に、第1信号を出力する判定部30と、を備える。
【選択図】 図7
特許請求の範囲
【請求項1】
検査領域内の人を移動体として検知可能なLiDAR装置と、
前記LiDAR装置で検知される前記移動体の最上部が下方に移動し、下方に移動する直前の前記最上部の位置より低い第1位置より前記最上部が低くなり、前記最上部が前記第1位置より低くなるタイミングでの前記最上部の下方に向かう速度が所定速度以上である場合に、第1信号を出力する判定部と、
を備える
ことを特徴とする転倒検知装置。
続きを表示(約 780 文字)
【請求項2】
前記判定部は、前記最上部の位置が前記第1位置より低くなるタイミングでの前記移動体の長手方向と鉛直方向とのなす角度が所定角度より大きい場合に前記第1信号を出力し、前記タイミングでの前記移動体の長手方向と鉛直方向とのなす角度が所定角度以下の場合に、前記第1信号を出力しない
ことを特徴とする請求項1に記載の転倒検知装置。
【請求項3】
前記判定部は、前記最上部が下方に移動し前記最上部が前記第1位置より低くなる際の前記最上部の水平方向の移動距離が所定距離より大きい場合に前記第1信号を出力し、前記最上部の水平方向の移動距離が前記所定距離以下の場合に、前記第1信号を出力しない
ことを特徴とする請求項1に記載の転倒検知装置。
【請求項4】
前記判定部は、前記最上部が下方に移動し前記最上部が前記第1位置より低くなる際の前記最上部の下方に向かう速度が、前記最上部の位置が低くなるほど速くなる場合に、前記第1信号を出力し、前記最上部の下方に向かう速度が、前記最上部の位置が低くなるほど速くならない場合に、前記第1信号を出力しない
ことを特徴とする請求項1に記載の転倒検知装置。
【請求項5】
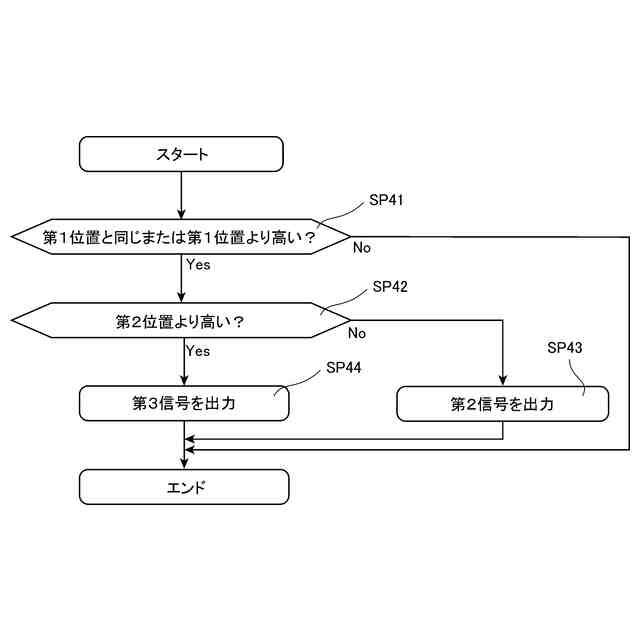
前記判定部は、前記最上部の位置が前記第1位置より低くなるタイミングから所定期間経過するまでに前記最上部の位置が前記第1位置と同じまたは前記第1位置より高くなる場合に、第2信号を出力する
ことを特徴とする請求項1から4のいずれか1項に記載の転倒検知装置。
【請求項6】
前記判定部は、前記タイミングから前記所定期間経過するまでに前記最上部の位置が前記第1位置より高い第2位置より高くなる場合に、第3信号を出力する
ことを特徴とする請求項5に記載の転倒検知装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、転倒検知装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
照射した光の反射光を検出することで対象物までの距離や形状を測定可能なLiDAR(Light Detection And Ranging)装置が知られており、下記特許文献1には、このLiDAR装置を用いた転倒検知装置が開示されている。
【0003】
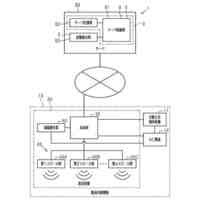
下記特許文献1に記載の転倒検知装置は、LiDAR装置と情報処理装置とを備える。LiDAR装置は、複数のレーザ光を監視領域へ照射して物体を検出し、情報処理装置は、LiDAR装置が検出した物体に照射されるレーザ光の数が減少した場合に、物体が転倒したと判定する。このため、この転倒検知装置によれば、転倒した人を検知することができるとされている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2020/188748号
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の転倒検知装置では、物体に照射されるLiDAR装置からのレーザ光の数の減少によって物体の転倒を検知している。しかし、例えば、人がしゃがむ場合、当該人に照射されるLiDAR装置からのレーザ光の数は、減少する。このため、上記特許文献1の転倒検知装置では、人がしゃがむ場合も転倒として誤検知してしまう場合がある。
【0006】
そこで、本発明は、誤検知を低減し得る転倒検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的の達成のため、本発明の転倒検知装置は、検査領域内の人を移動体として検知可能なLiDAR装置と、前記LiDAR装置で検知される前記移動体の最上部が下方に移動し、下方に移動する直前の前記最上部の位置より低い第1位置より前記最上部が低くなり、前記最上部が前記第1位置より低くなるタイミングでの前記最上部の速度が所定速度以上である場合に、第1信号を出力する判定部と、を備えることを特徴とするものである。
【0008】
立っている人における最上部は、例えば頭であり、倒れている人における最上部は、例えば頭や背中等であり、立っている人における最上部の位置より低い。また、人が転倒する場合、頭の下方に向かう速度は、頭の位置が低くなるほど速くなる傾向にあり、しゃがむ場合における頭の下方に向かう速度より速くなる傾向にある。この転倒検知装置では、上記のように、判定部は、移動体の最上部が下方に移動し、下方に移動する直前の最上部の位置より低い第1位置より最上部が低くなり、最上部が第1位置より低くなるタイミングでの最上部の速度が所定速度以上である場合に、第1信号を出力する。このため、この転倒検知装置によれば、第1位置を立っている人における最上部より低く、転倒し床等に横たわった人における最上部より高い位置となるように設定し得、移動体として人が転倒する場合に判定部から第1信号が出力するようにし得る。従って、この転倒検知装置によれば、人の転倒を検知し得る。また、この転倒検知装置によれば、上記の所定速度をしゃがむ場合の頭部の速度より速く、転倒する場合の頭部の最高速度より遅い速度となるように設定し得、人がしゃがむ場合に判定部が第1信号を出力しないようにし得る。従って、この転倒検知装置によれば、移動体の最上部の速度を考慮しない場合と比べて、誤検知を低減し得る。
【0009】
前記判定部は、前記最上部の位置が前記第1位置より低くなるタイミングでの前記移動体の長手方向と鉛直方向とのなす角度が所定角度より大きい場合に前記第1信号を出力し、前記タイミングでの前記移動体の長手方向と鉛直方向とのなす角度が所定角度以下の場合に、前記第1信号を出力しなくてもよい。
【0010】
人が転倒する場合、膝を大きく曲げずに姿勢が鉛直方向に対して傾いた状態となって頭が低くなり、床等に倒れる傾向がある。一方、人がしゃがむ場合、このような傾向ではない。このため、この転倒検知装置によれば、人がしゃがむ場合に判定部が第1信号を出力しないようにし得る。従って、この転倒検知装置によれば、上記の角度を考慮しない場合と比べて、誤検知を低減し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動車ケアフル灯
3か月前
日本精機株式会社
路面投影装置
10日前
ニッタン株式会社
発信機
16日前
ニッタン株式会社
発信機
2か月前
個人
防犯に特化したアプリケーション
18日前
ニッタン株式会社
発信機
5日前
ニッタン株式会社
発信機
2か月前
東京都公立大学法人
液滴検出装置
18日前
個人
逆走・正走車両検出システム
2か月前
TOA株式会社
拡声放送システム
9日前
日本信号株式会社
信号情報システム
3日前
株式会社JVCケンウッド
警報装置
4日前
アズビル株式会社
建物管理システム
1か月前
日本信号株式会社
情報提供システム
2か月前
日本信号株式会社
情報提供システム
3日前
株式会社アジラ
データ転送システム
9日前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
2か月前
トヨタ自動車株式会社
回避動作判別装置
3日前
個人
磁気・光学誘導路線による車両の運行制御
2か月前
株式会社JVCケンウッド
情報処理装置
1か月前
日本信号株式会社
交通信号制御システム
3日前
株式会社豊田自動織機
制御システム
9日前
ホーチキ株式会社
非常通報システム
1か月前
トヨタ自動車株式会社
配車システム
2か月前
株式会社フィットネスワン
見守りシステム
1か月前
ホーチキ株式会社
火災検出システム
4日前
トヨタ自動車株式会社
障害物検知装置
25日前
Adora株式会社
アプリ使用制御システム
1か月前
ユニティガードシステム株式会社
警備監視システム
1か月前
トヨタ自動車株式会社
方法
2日前
東亜電子工業株式会社
警報コントローラ
2か月前
個人
注意喚起システム及び注意喚起装置
9日前
能美防災株式会社
火災感知器窓部清掃システム
23日前
能美防災株式会社
非常報知システム
2か月前
シャープ株式会社
駐車場管理装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ