TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024101196
公報種別
公開特許公報(A)
公開日
2024-07-29
出願番号
2023005020
出願日
2023-01-17
発明の名称
移動体、設計支援装置及び設計支援方法
出願人
株式会社ダイヘン
,
国立大学法人宇都宮大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B62D
15/00 20060101AFI20240722BHJP(鉄道以外の路面車両)
要約
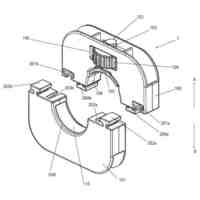
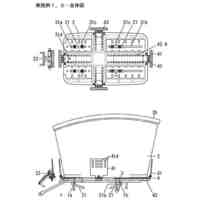
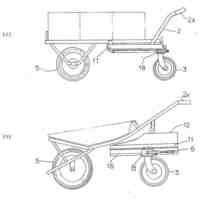
【課題】複数の全方向移動車輪を非対称に配置した場合であっても、直進性を向上させることができる移動体を提供する。
【解決手段】移動体は、3個以上の全方向移動車輪11を備える移動体であって、全方向移動車輪11のうち、少なくとも2個の全方向移動車輪11の推力方向が異なるように配置され、移動体の基準点を原点とするxy直交座標系において、移動体の移動により全方向移動車輪11の各々に生ずる速度ベクトルと、当該速度ベクトルを基準にして求まる移動体の旋回中心までの距離との積により表される速度モーメントの総和がゼロとなるように全方向移動車輪11が配置されている。
【選択図】図3
特許請求の範囲
【請求項1】
3個以上の全方向移動車輪を備える移動体であって、
前記全方向移動車輪のうち、少なくとも2個の全方向移動車輪の推力方向が異なるように配置され、
前記移動体の基準点を原点とするxy直交座標系において、前記移動体の移動により前記全方向移動車輪の各々に生ずる速度ベクトルと、当該速度ベクトルを基準にして求まる前記移動体の旋回中心までの距離との積により表される速度モーメントの総和がゼロとなるように前記全方向移動車輪が配置されている、
移動体。
続きを表示(約 2,000 文字)
【請求項2】
n(nは3以上の整数)個の全方向移動車輪の各々の代表点のx座標をx
i
(i:1~nまでの整数)、前記代表点のy座標をy
i
とし、n個の全方向移動車輪の各々の回転面方向の速度ベクトルをV
i
とし、前記各々の回転面方向とX軸とのなす角度をθ
i
とし、前記移動体の旋回中心から前記速度ベクトルV
i
の各々により形成される直線に引いた垂線の長さをl'
i
とし、前記移動体の速度のx方向成分をV
x
、前記移動体の速度のy方向成分をV
y
とした場合に、以下の式(1)及び式(2)を満たすように、3個以上の全方向移動車輪が配置されている、
TIFF
2024101196000017.tif
10
170
TIFF
2024101196000018.tif
10
170
請求項1記載の移動体。
【請求項3】
3個以上の全方向移動車輪のうち、少なくとも2個の全方向移動車輪の推力方向が異なるように前記全方向移動車輪を移動体に配置する際における、配置場所の設計を支援する設計支援装置であって、
前記全方向移動車輪を前記移動体に配置する際に、前記全方向移動車輪のうち最後に配置する全方向移動車輪の配置場所を算出する算出部を備え、
前記算出部は、前記移動体の基準点を原点とするxy直交座標系における以下の式(3)及び式(4)を用いて、前記最後に配置する全方向移動車輪の回転面方向とx軸とのなす角度θ
n
、及び前記最後に配置する全方向移動車輪の代表点の座標(x
n
、y
n
)を定める直線を算出する、
TIFF
2024101196000019.tif
19
170
TIFF
2024101196000020.tif
19
170
(ここで、n:全方向移動車輪の個数、i:1~nまでの整数、x
i
:全方向移動車輪の各々の代表点のx座標、y
i
:全方向移動車輪の各々の代表点のy座標、θ
i
:全方向移動車輪の各々の回転面方向とx軸とのなす角度、とし、A及びBは左辺のn-1個分の総和を便宜上置き換えるために用いるものである)
設計支援装置。
【請求項4】
前記算出部は、式(3)及び式(4)から導出される以下の式(5)を用いて、前記最後に配置する全方向移動車輪の回転面方向とx軸とのなす角度θ
n
を算出し、
TIFF
2024101196000021.tif
8
170
式(3)及び式(4)から導出される以下の式(6)を用いて、前記最後に配置する全方向移動車輪の代表点の座標(x
n
、y
n
)を定める直線を算出する、
TIFF
2024101196000022.tif
9
170
請求項3記載の設計支援装置。
【請求項5】
3個以上の全方向移動車輪のうち、少なくとも2個の全方向移動車輪の推力方向が異なるように前記全方向移動車輪を移動体に配置する際における、配置位置の設計を支援する装置において実行される方法であって、
前記全方向移動車輪を前記移動体に配置する際に、前記全方向移動車輪のうち最後に配置する全方向移動車輪の配置場所を算出するステップを含み、
前記算出するステップは、前記移動体の基準点を原点とするxy直交座標系における以下の式(7)及び式(8)を用いて、前記最後に配置する全方向移動車輪の回転面方向とx軸とのなす角度θ
n
、及び前記最後に配置する全方向移動車輪の代表点の座標(x
n
、y
n
)を定める直線を算出する、
TIFF
2024101196000023.tif
19
170
TIFF
2024101196000024.tif
19
170
(ここで、n:全方向移動車輪の個数、i:1~nまでの整数、x
i
:全方向移動車輪の各々の代表点のx座標、y
i
:全方向移動車輪の各々の代表点のy座標、θ
i
:全方向移動車輪の各々の回転面方向とx軸とのなす角度、とし、A及びBは左辺のn-1個分の総和を便宜上置き換えるために用いるものである)
設計支援方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、全方向移動車輪を備える移動体、設計支援装置及び設計支援方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、全方向に移動できる移動体として、複数の全方向移動車輪(例えば、オムニホイール)を備える移動体が開発されている(例えば、下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2005-047312号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の4輪駆動式の移動体は、前輪同士や後輪同士が並行ではなくハの字形に配置されていて、各車輪が非対称に配置された状態になっている。各車輪が非対称に配置されると、各車輪の回転方向(推力方向)が一致しない状態となるため、移動体を安定して直進させることが難しくなる。
【0005】
そこで、本発明は、複数の全方向移動車輪を非対称に配置した場合であっても、直進性を向上させることができる移動体、設計支援装置及び設計支援方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る移動体は、3個以上の全方向移動車輪を備える移動体であって、全方向移動車輪のうち、少なくとも2個の全方向移動車輪の推力方向が異なるように配置され、移動体の基準点を原点とするxy直交座標系において、移動体の移動により全方向移動車輪の各々に生ずる速度ベクトルと、当該速度ベクトルを基準にして求まる移動体の旋回中心までの距離との積により表される速度モーメントの総和がゼロとなるように全方向移動車輪が配置されている。
【0007】
この態様によれば、3個以上の全方向移動車輪を非対称に配置させる場合であっても、全方向移動車輪の各々に生ずる速度ベクトルと移動体の旋回中心までの距離との積により表される速度モーメントの総和がゼロになるように、それぞれの全方向移動車輪を配置することができるため、移動体の直進性を向上させることが可能となる。
【0008】
上記態様において、n(nは3以上の整数)個の全方向移動車輪の各々の代表点のx座標をx
i
(i:1~nまでの整数)、代表点のy座標をy
i
とし、n個の全方向移動車輪の各々の回転面方向の速度ベクトルをV
i
とし、各々の回転面方向とX軸とのなす角度をθ
i
とし、移動体の旋回中心から速度ベクトルV
i
の各々により形成される直線に引いた垂線の長さをl'
i
とし、移動体の速度のx方向成分をV
x
、移動体の速度のy方向成分をV
y
とした場合に、以下の式(1)及び式(2)を満たすように、3個以上の全方向移動車輪が配置されていてもよい。
TIFF
2024101196000002.tif
10
170
TIFF
2024101196000003.tif
10
170
【0009】
この態様によれば、3個以上の全方向移動車輪を、式(1)及び式(2)を満たすように配置することで、全方向移動車輪の各々に生ずる速度モーメントのx方向成分の総和及びy方向成分の総和をそれぞれゼロにすることができる。
【0010】
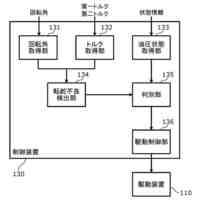
本発明の他の態様に係る設計支援装置は、3個以上の全方向移動車輪のうち、少なくとも2個の全方向移動車輪の推力方向が異なるように全方向移動車輪を移動体に配置する際における、配置場所の設計を支援する設計支援装置であって、全方向移動車輪を移動体に配置する際に、全方向移動車輪のうち最後に配置する全方向移動車輪の配置場所を算出する算出部を備え、算出部は、移動体の基準点を原点とするxy直交座標系における以下の式(3)及び式(4)を用いて、最後に配置する全方向移動車輪の回転面方向とx軸とのなす角度θ
n
、及び最後に配置する全方向移動車輪の代表点の座標(x
n
、y
n
)を定める直線を算出する。
TIFF
2024101196000004.tif
15
170
TIFF
2024101196000005.tif
15
170
(ここで、n:全方向移動車輪の個数、i:1~nまでの整数、x
i
:全方向移動車輪の各々の代表点のx座標、y
i
:全方向移動車輪の各々の代表点のy座標、θ
i
:全方向移動車輪の各々の回転面方向とx軸とのなす角度、とし、A及びBは左辺のn-1個分の総和を便宜上置き換えるために用いるものである)
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
重量物移動台車
6か月前
個人
自転車用荷台
2か月前
井関農機株式会社
作業車両
4か月前
株式会社クラベ
面状ユニット
5か月前
株式会社ホシプラ
台車
6か月前
個人
ステアリングの操向部材
2か月前
個人
スライドレインプルーフ
5か月前
三甲株式会社
台車
1か月前
三甲株式会社
台車
1か月前
帝人株式会社
車両構造体
5か月前
祖峰企画株式会社
平台車
3か月前
ヤマハ発動機株式会社
車両
7日前
ヤマハ発動機株式会社
車両
7日前
ヤマハ発動機株式会社
車両
7日前
ダイハツ工業株式会社
車両
25日前
豊田合成株式会社
ハンドル
6か月前
個人
足踏みペダル式自転車
5か月前
ヤマハ発動機株式会社
車両
7日前
豊田合成株式会社
操舵装置
4日前
株式会社オカムラ
カート装置
6か月前
株式会社クボタ
作業車
3か月前
株式会社クボタ
作業車
3か月前
アルインコ株式会社
運搬台車
4か月前
アルインコ株式会社
運搬台車
4か月前
株式会社オカムラ
カート装置
6か月前
ダイハツ工業株式会社
車両構造
3か月前
ダイハツ工業株式会社
車両構造
3か月前
ダイハツ工業株式会社
車両構造
3か月前
株式会社Kaedear
給電器
2か月前
株式会社ホシプラ
ハンドガード
4か月前
株式会社ジェイテクト
操舵装置
1か月前
個人
自転車荷台への搭載物の取付構造
2か月前
ダイハツ工業株式会社
車両構造
19日前
個人
手押し運搬車車輪システム
1か月前
豊田合成株式会社
車両制御装置
4日前
株式会社宝島社
アシスト自転車
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ