TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024055214
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022161963
出願日
2022-10-06
発明の名称
電動運搬車両
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
B60W
20/15 20160101AFI20240411BHJP(車両一般)
要約
【課題】車両発進時における車止めとの接触による発進不能状態を確実に判定できる電動運搬車両を提供する。
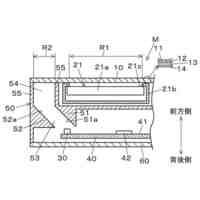
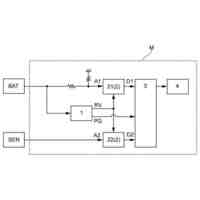
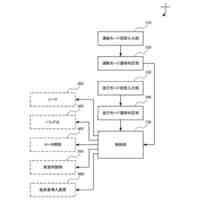
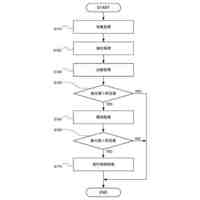
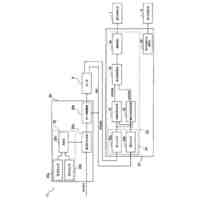
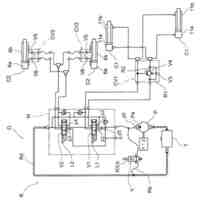
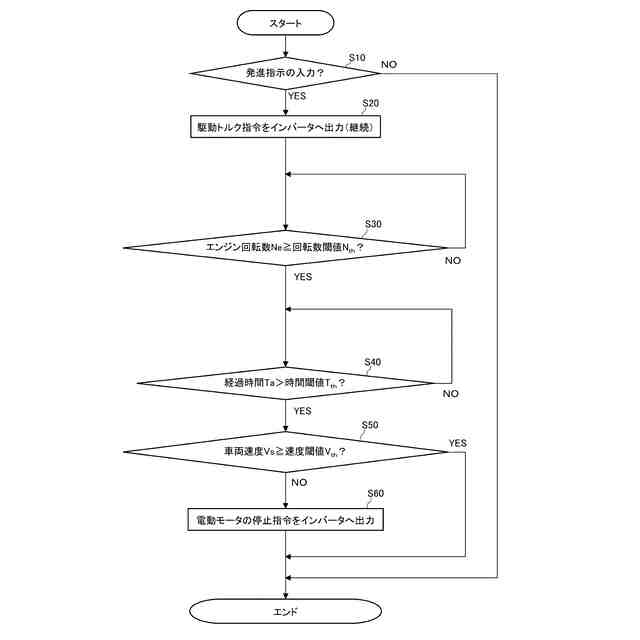
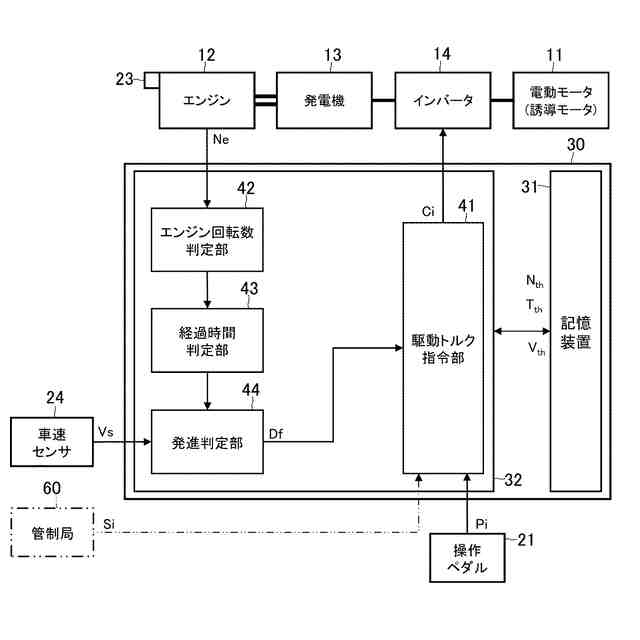
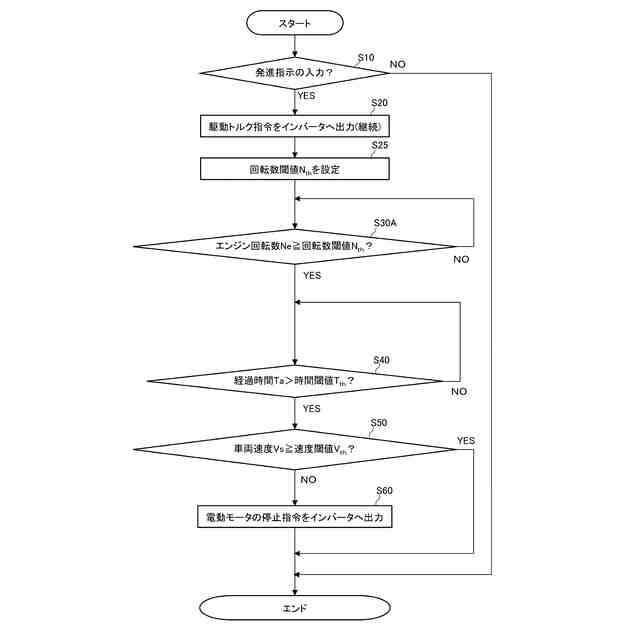
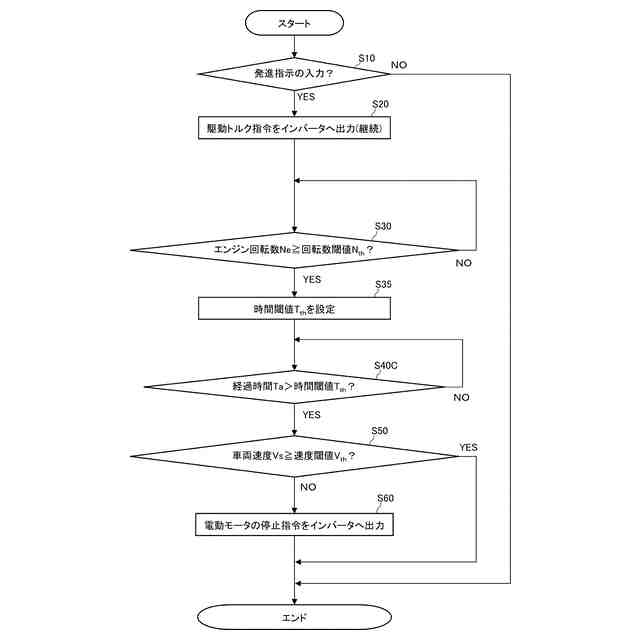
【解決手段】電動運搬車両1は、エンジン12により駆動される発電機13からの電力供給により駆動する電動モータ11の駆動力により走行する。電動モータを制御するコントローラ30は、車両発進の指示が入力された場合に回転数センサ23の検出値であるエンジン回転数Neが回転数閾値Nth以上かを判定するエンジン回転数判定部42と、当該検出値Neが回転数閾値以上と判定された時点から計測する第1経過時間Taが時間閾値Tthに達したかを判定する経過時間判定部43と、第1経過時間が時間閾値に達したと判定された後に速度センサ24の検出値である車両速度Vsが速度閾値Vth以上かを判定する発進判定部44とを有し、速度センサの検出値が速度閾値未満と判定された場合に電動モータを停止させる。
【選択図】 図3
特許請求の範囲
【請求項1】
エンジンと、
前記エンジンにより機械的に駆動される発電機と、
前記発電機から供給される電力により駆動される電動モータと、
前記エンジンの回転数を検出する回転数センサと、
車両速度を検出する速度センサと、
前記電動モータの駆動を制御するコントローラとを備え、
前記電動モータの駆動力によって走行することで積荷を運搬する電動運搬車両において、
前記コントローラは、
車両発進の指示が入力された場合に前記回転数センサの検出値が回転数閾値以上であるか否かを判定するエンジン回転数判定部と、
前記回転数センサの検出値が前記回転数閾値以上であると前記エンジン回転数判定部が判定した時点からの第1経過時間を計測し、前記第1経過時間が時間閾値に到達したか否かを判定する経過時間判定部と、
前記第1経過時間が前記時間閾値に到達したと前記経過時間判定部が判定した後に、前記速度センサの検出値が速度閾値以上であるか否かを判定する発進判定部とを有し、
前記速度センサの検出値が前記速度閾値未満であると前記発進判定部が判定した場合には前記電動モータを停止させる
ことを特徴とする電動運搬車両。
続きを表示(約 960 文字)
【請求項2】
請求項1に記載の電動運搬車両において、
前記積荷の積載重量を検出する積載量センサを更に備え、
前記回転数閾値は、前記積載量センサの検出値が大きくなるにしたがって高くなるように設定される
ことを特徴とする電動運搬車両。
【請求項3】
請求項1に記載の電動運搬車両において、
路面勾配を検出可能な傾斜センサを更に備え、
前記回転数閾値は、前記車両発進の指示の車両進行方向が登坂する方向である場合、前記傾斜センサの検出値が大きくなるにしたがって高くなるように設定される
ことを特徴とする電動運搬車両。
【請求項4】
請求項1に記載の電動運搬車両において、
前記積荷の積載重量を検出する積載量センサを更に備え、
前記時間閾値は、前記積載量センサの検出値が大きくなるにしたがって長くなるように設定される
ことを特徴とする電動運搬車両。
【請求項5】
請求項1に記載の電動運搬車両において、
前記時間閾値は、路面の走行抵抗が大きくなるにしたがって長くなるように設定される
ことを特徴とする電動運搬車両。
【請求項6】
請求項5に記載の電動運搬車両において、
路面勾配を検出可能な傾斜センサを更に備え、
前記路面の走行抵抗は、前記傾斜センサにより検出される路面勾配に基づき算出される走行抵抗である
ことを特徴とする電動運搬車両。
【請求項7】
請求項5に記載の電動運搬車両において、
前記路面の走行抵抗は、外部から入力される路面状態に関する情報に基づき算出される走行抵抗である
ことを特徴とする電動運搬車両。
【請求項8】
請求項1に記載の電動運搬車両において、
前記経過時間判定部は、さらに、前記車両発進の指示が入力されてから、前記回転数センサの検出値が前記回転数閾値以上であると判定される時点までの第2経過時間を計測するように構成され、
前記時間閾値は、計測された第2経過時間が長くなるにしたがって長くなるように設定される
ことを特徴とする電動運搬車両。
発明の詳細な説明
【技術分野】
【0001】
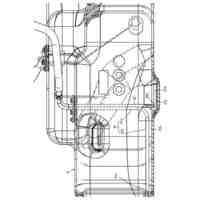
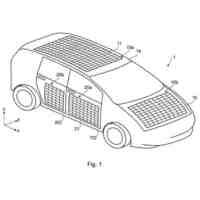
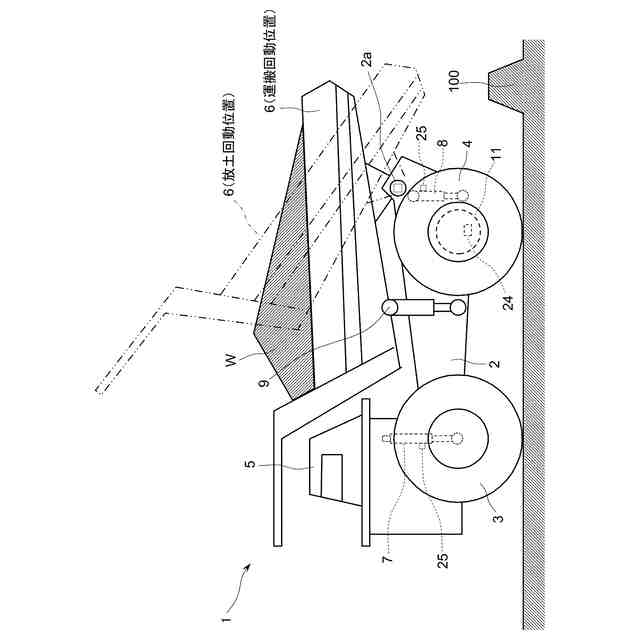
本発明は、鉱山などで掘削された鉱石や土砂を搬送するダンプトラック等の運搬車両に係り、さらに詳しくは、エンジンに機械的に接続された発電機から電力が供給されることで駆動する電動モータの駆動力によって走行する電動運搬車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
露天掘り鉱山では、ダンプトラック等の運搬車両が掘削された鉱石や土砂を搬送している。運搬車両は、一般的に、鉱物を掘削している積込場で運搬物を荷台に積載し、運搬物を積載した状態で搬送路を走行し、運搬物を放土場で排出する(放土する)。運搬物を排出して荷台が空になった運搬車両は、再び搬送路を走行して積込場に戻り、再び運搬物を荷台に積載する。運搬車両は、このような積載と放土を何回も繰り返す作業を実行する。
【0003】
運搬車両が放土場で運搬物を放土する方法として、次のような方法がある。第1に、運搬車両は、広い平地において少しずつ位置を変えながら目標位置へと後退し、地面の上に直接放土する。第2に、運搬車両は、ホッパと称する投入口又は崖下の直前まで後退し、ホッパ又は崖下へと放土する。
【0004】
第2の方法を用いる場合には、放土を毎回おおよそ決まった場所から行うことができるという利点がある。しかし、運搬車両は、放土位置への後退時に行き過ぎてしまうことでホッパの中又は崖下へと落下してしまう懸念がある。そこで、ホッパ又は崖の手前には、車両の落下を防ぐために、土盛りなどによる車止めが設置されている。運搬車両は、放土位置を行き過ぎてしまいそうになったとしても、車止めの走行抵抗によってその走行が抑止されるようになっている。
【0005】
上述のような運搬車両においては、トランスミッションなどの機構部の削減によるメンテナンスコストの低減などを目的として、近年電動化が進んでいる。電動運搬車両は、エンジンに機械的に接続された発電機によって発電を行い、発電機の発電電力を後輪(駆動輪)に装着された電動モータに供給することで、電動モータを走行駆動源として走行するものが一般的である。
【0006】
電動モータを走行駆動源とする電動運搬車両においては、車止めに接触して走行不能な状態であるにも関わらず電動モータの出力が継続されると、電動モータ(走行駆動源)のエネルギが浪費されたり、駆動機構に対する負荷が増加したりするので、エネルギ効率の低下に繋がってしまう。また、鉱山などで近年導入され始めている自律走行型の運搬車両においては、発進指令が出力されているにも関わらず車止めに接触して走行不能な状態が継続した場合、当該発進指令が完了せず、次の指令に進めないデッドロックに陥る懸念がある。これらの理由により、電動運搬車両は、車輪が車止めに接触することで走行不能な状態にあるか否かを判定し、走行不能な状態にあると判定した場合には車両の走行駆動源を停止させることが望ましい。
【0007】
車両の車輪が車止めに接触して走行不能な状態にあるか否かを判定する技術として、特許文献1に記載の技術が提案されている。特許文献1に記載の運転支援装置は、制駆動力検出部で検出した運転操作によって生じる制駆動力(制動力と駆動力の合力)を基に推定した車両の前後方向の加速度と加速度検出部で検出した車両の前後方向の加速度との乖離の度合いを算出し、算出した乖離の度合いを基に車両が車止めに接触したか否かを判定している。当該運転支援装置は、例えば、自動車などの量産車両への搭載が想定されるものである。
【先行技術文献】
【特許文献】
【0008】
特開2012-116360号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1に記載の技術を用いて車両発進時における車両の車止めへの接触の有無を判定する場合、自車両の加速度を精度よく推定するためには、運転操作によって生じる制駆動力を高精度に逐次検出する必要がある。電気車両の場合、運転操作によって生じる制駆動力のうちの駆動力は電動モータの出力トルクの値を基に算出されるので、電動モータの出力トルクを高精度に検出する必要がある。
【0010】
ところで、鉱山で用いられる大型の電動運搬車両では、走行駆動源として大型の電動モータが求められるので、一般乗用の電気自動車に採用される永久磁石型の同期モータではなく、誘導モータが採用されることが一般的である。これは、誘導モータが巻線界磁を用いることで永久磁石型よりも大型に製作することができると共に、振動衝撃や高温に強いなど過酷環境にも対応可能だからである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スーパーEV
1か月前
個人
骨組み型熱交換器
11日前
個人
自動車暴走抑制装置
18日前
株式会社コーワ
清掃装置
3か月前
日本精機株式会社
表示装置
2か月前
井関農機株式会社
作業車両
4日前
東レ株式会社
フロントグリル
18日前
個人
断熱構造体とその製造方法
2か月前
日本精機株式会社
車両用表示装置
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
1か月前
株式会社SUBARU
車両
2か月前
井関農機株式会社
作業車両
1か月前
オクト産業株式会社
自動車
1か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
1か月前
トヨタ自動車株式会社
車両
2か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
2か月前
株式会社SUBARU
車両
28日前
株式会社SUBARU
車両
2か月前
株式会社SUBARU
車両
28日前
株式会社SUBARU
車両
28日前
トヨタ自動車株式会社
車両
1か月前
日邦産業株式会社
ウォッシャ
3か月前
日本化薬株式会社
ガス発生器
2か月前
カヤバ株式会社
シリンダ装置
28日前
新明和工業株式会社
作業車両
1か月前
日本化薬株式会社
ガス発生器
3か月前
新明和工業株式会社
荷箱の天蓋装置
25日前
豊田合成株式会社
乗員保護装置
3か月前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
ダイハツ工業株式会社
搬送装置
13日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ