TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024054954
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022161440
出願日
2022-10-06
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
30/09 20120101AFI20240411BHJP(車両一般)
要約
【課題】自動操舵制御において乗員の不安感を緩和することができる車両制御装置を提供する。
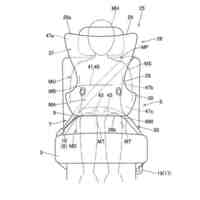
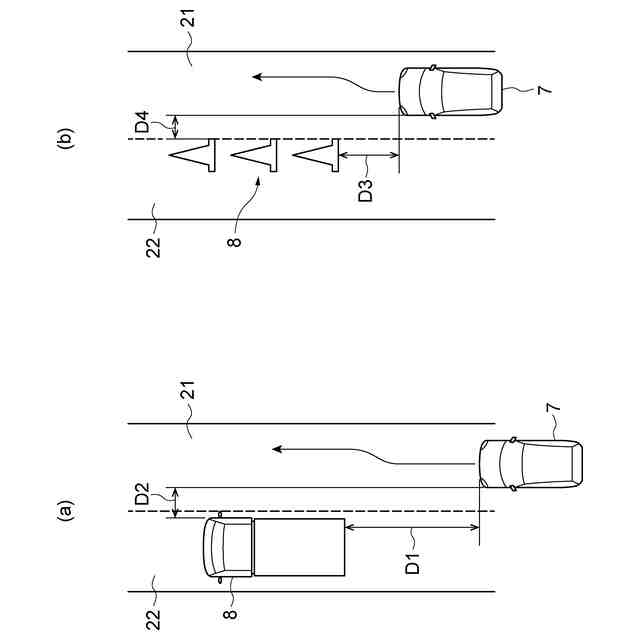
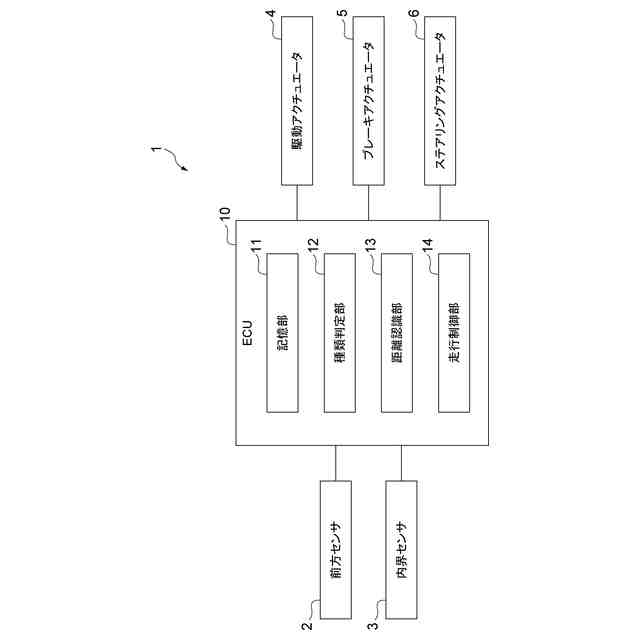
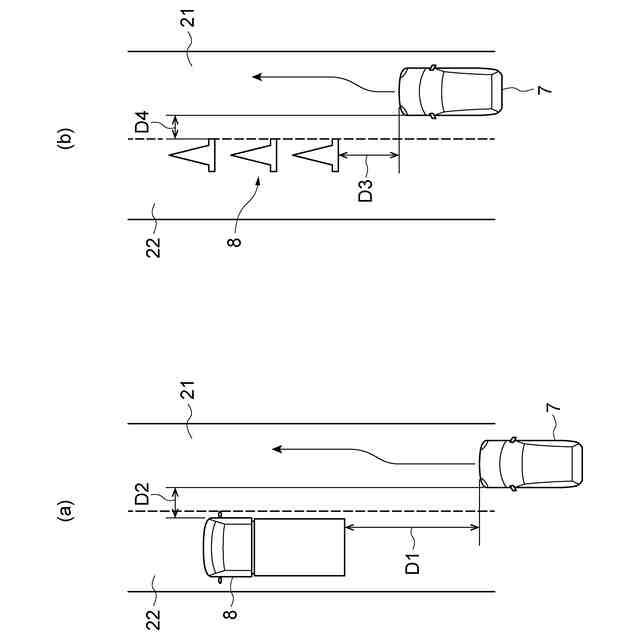
【解決手段】車両制御装置は、自動運転車両である車両7の走行車線21外で走行車線21から一定距離内且つ車両7の前方に存在する対象物8と車両との間の横距離D2,D4を確保するための車両7の自動操舵制御を実行する車両制御装置である。車両制御装置は、車両7に搭載された前方センサの検出結果に基づいて、対象物8の種類を判定する種類判定部と、対象物8の種類に応じて、自動操舵制御における目標横速度を変化させる走行制御部と、を備える。
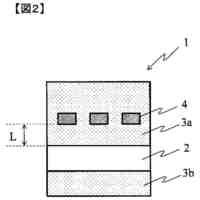
【選択図】図2
特許請求の範囲
【請求項1】
車両の走行車線外で前記走行車線から一定距離内且つ前記車両の前方に存在する対象物と前記車両との間の横距離を確保するための前記車両の自動操舵制御を実行する車両制御装置であって、
前記車両に搭載された前方センサの検出結果に基づいて、前記対象物の種類を判定する種類判定部と、
前記対象物の種類に応じて、前記自動操舵制御における目標横速度を変化させる走行制御部と、を備える、車両制御装置。
続きを表示(約 480 文字)
【請求項2】
前記前方センサの検出結果に基づいて、前記車両の前後方向における前記対象物と前記車両との距離を認識する距離認識部を更に備え、
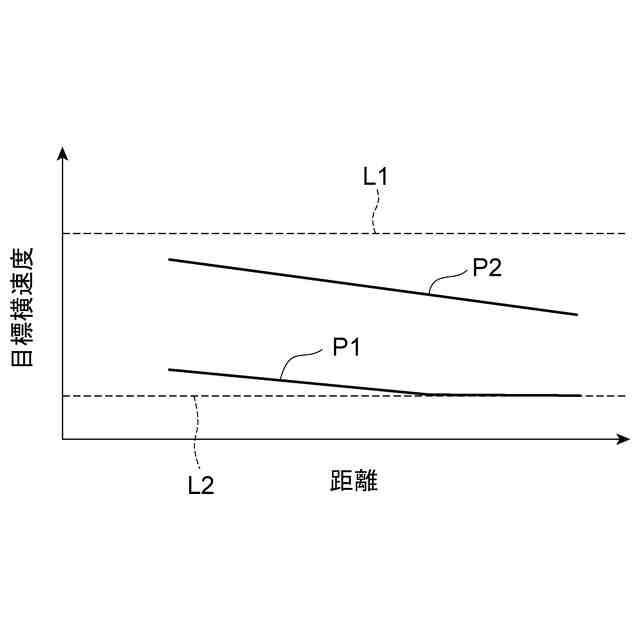
前記走行制御部は、前記距離が小さいほど前記目標横速度が大きくなる目標横速度パターンに沿って前記自動操舵制御を実行し、
前記目標横速度パターンは、前記対象物の種類ごとに異なっている、請求項1に記載の車両制御装置。
【請求項3】
前記種類判定部は、前記前方センサの検出結果に基づいて、前記対象物の移動状態を判定し、
前記対象物が移動体である場合における前記目標横速度パターンは、前記対象物が静止体である場合における前記目標横速度パターンと異なっている、請求項2に記載の車両制御装置。
【請求項4】
前記種類判定部は、前記前方センサの検出結果に基づいて、前記対象物の大きさを判定し、
前記対象物が大型物体である場合における前記目標横速度パターンは、前記対象物が小型物体である場合における前記目標横速度パターンと異なっている、請求項2に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、車両制御装置に関する技術文献として、特開2003-29841号公報が知られている。この公報には、自車両が目標車線内位置へ移動する際に、自車両の車速に応じて目標車線内位置への移動速度を制御することにより、乗員の不安感を緩和する技術が示されている。
【先行技術文献】
【特許文献】
【0003】
特開2003-29841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような車両制御装置では、車両の走行車線外で走行車線から一定距離内且つ車両の前方に存在する対象物から横距離を取る自動操舵制御が実行される場合がある。この自動操舵制御の実行においても、乗員の不安感を緩和するための更なる改善が求められている。
【0005】
本開示は、自動操舵制御における乗員の不安感を緩和することができる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る車両制御装置は、車両の走行車線外で走行車線から一定距離内且つ車両の前方に存在する対象物と車両との間の横距離を確保するための車両の自動操舵制御を実行する車両制御装置であって、車両に搭載された前方センサの検出結果に基づいて、対象物の種類を判定する種類判定部と、対象物の種類に応じて、自動操舵制御における目標横速度を変化させる走行制御部と、を備える。
【0007】
上記の車両制御装置は、前方センサの検出結果に基づいて、車両の前後方向における対象物と車両との距離を認識する距離認識部を更に備え、走行制御部は、当該距離が小さいほど目標横速度が大きくなる目標横速度パターンに沿って自動操舵制御を実行し、目標横速度パターンは、対象物の種類ごとに異なっていてもよい。
【発明の効果】
【0008】
本開示によれば、自動操舵制御における乗員の不安感を緩和することができる車両制御装置を提供することが可能となる。
【図面の簡単な説明】
【0009】
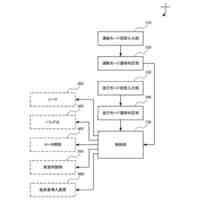
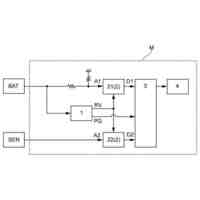
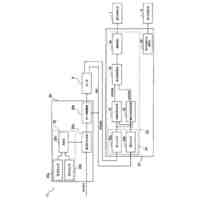
一実施形態の車両制御装置を示すブロック図である。
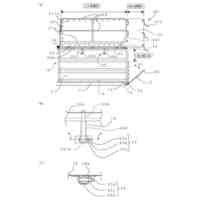
対象物の種類に応じた自動操舵制御を説明するための図である。
対象物の種類に対応した目標横速度パターンを示す図である。
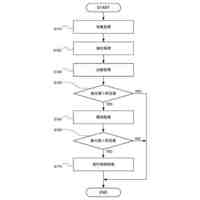
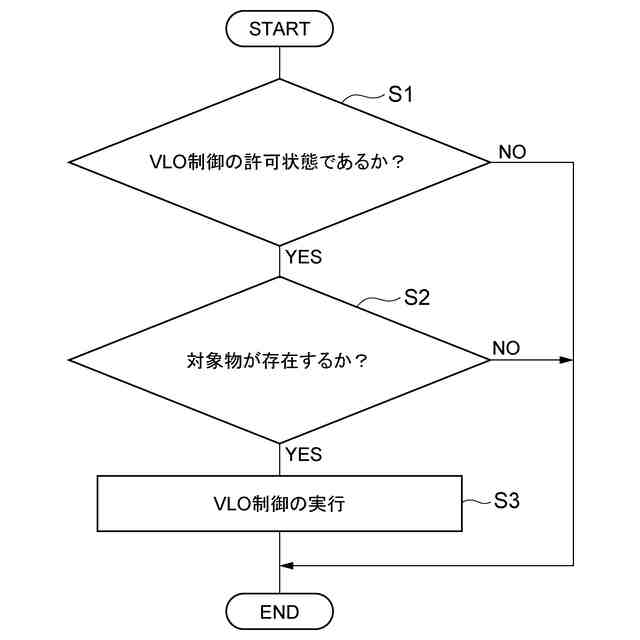
車両制御装置による処理を示すフローチャートである。
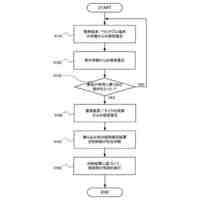
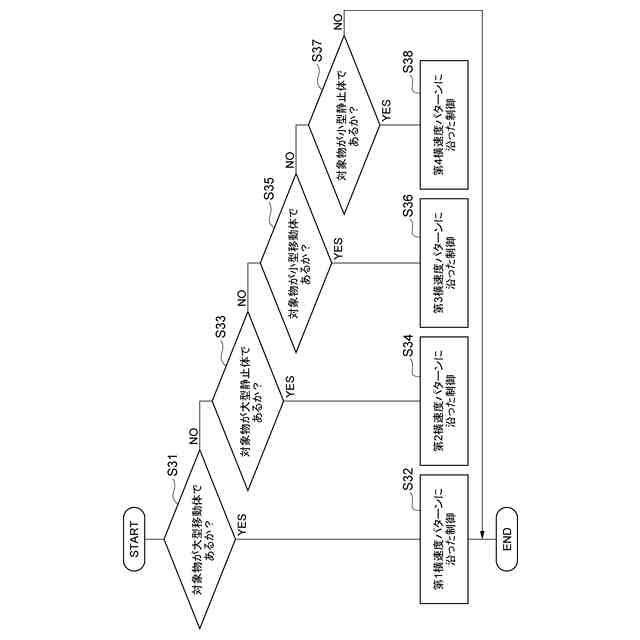
VLO制御を示すフローチャートである。
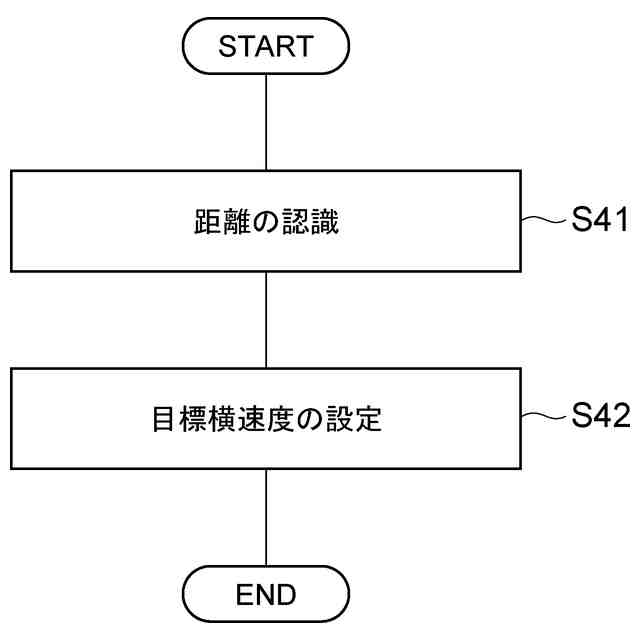
VLO制御を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態について図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スーパーEV
1か月前
個人
骨組み型熱交換器
6日前
個人
自動車暴走抑制装置
13日前
日本精機株式会社
表示装置
2か月前
東レ株式会社
フロントグリル
13日前
個人
断熱構造体とその製造方法
2か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
オクト産業株式会社
自動車
1か月前
株式会社SUBARU
車両
2か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
井関農機株式会社
作業車両
2か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
1か月前
株式会社SUBARU
車両
23日前
株式会社SUBARU
車両
23日前
株式会社SUBARU
車両
23日前
株式会社SUBARU
車両
2か月前
カヤバ株式会社
シリンダ装置
23日前
新明和工業株式会社
荷箱の天蓋装置
20日前
新明和工業株式会社
作業車両
1か月前
日本化薬株式会社
ガス発生器
1か月前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
乗員保護装置
2か月前
オムロン株式会社
表示システム
6日前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
1か月前
ダイハツ工業株式会社
搬送装置
8日前
株式会社アイシン
給気装置
13日前
デルタ工業株式会社
シート
14日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ