TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024041551
公報種別
公開特許公報(A)
公開日
2024-03-27
出願番号
2022146427
出願日
2022-09-14
発明の名称
車両の運転支援方法、運転支援装置及び運転支援プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B60W
30/09 20120101AFI20240319BHJP(車両一般)
要約
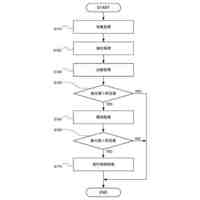
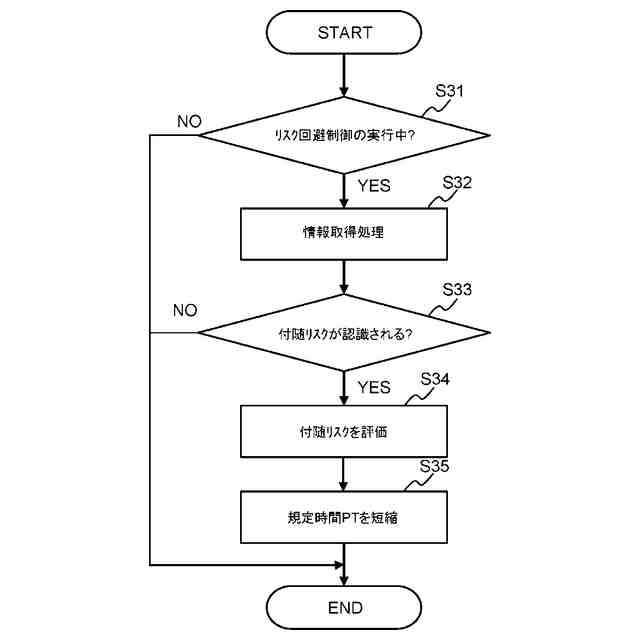
【課題】リスク要因を回避するための運転支援制御の実行の開始後において、この実行を適切に中止する。
【解決手段】車両の運転を支援する方法は、前記車両の運転環境情報に基づいて、前記車両の前方のリスク要因を回避するための運転支援制御を実行するステップと、前記運転支援制御の実行の開始後、前記車両の操作者による当該実行の中止を要求する車両操作が検出された場合、当該検出が継続する時間をカウントするステップと、前記車両操作の検出が継続する時間が規定時間を上回る場合、前記運転支援制御の実行を中止するステップと、を含む。前記方法は、更に、前記車両操作の検出が継続する時間のカウント中、前記運転環境情報に基づいて、前記運転支援制御の実行の継続に伴って生じる付随リスクを評価するステップと、前記付随リスクの評価の結果に基づいて、前記規定時間を短縮するステップと、を含む。
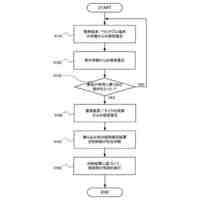
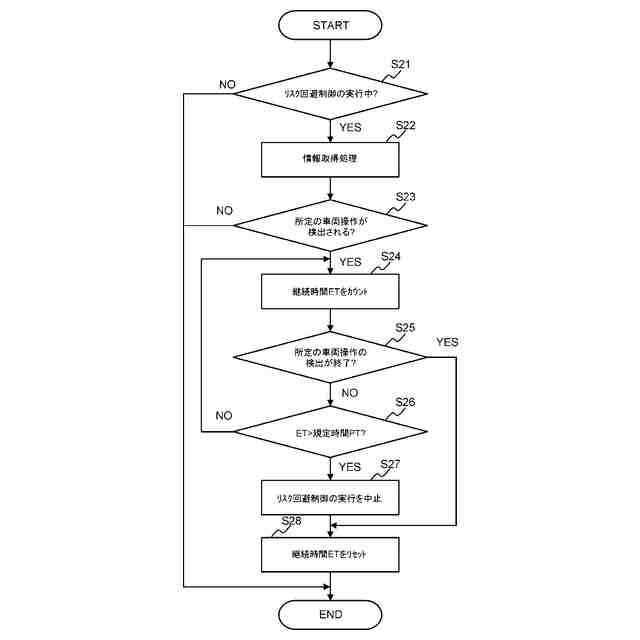
【選択図】図10
特許請求の範囲
【請求項1】
車両の運転を支援する方法であって、
前記車両の運転環境情報に基づいて、前記車両の前方のリスク要因を回避するための運転支援制御を実行するステップと、
前記運転支援制御の実行の開始後、前記車両の操作者による当該実行の中止を要求する車両操作が検出された場合、当該検出が継続する時間をカウントするステップと、
前記車両操作の検出が継続する時間が規定時間を上回る場合、前記運転支援制御の実行を中止するステップと、
を含み、
前記車両操作の検出が継続する時間のカウント中、前記運転環境情報に基づいて、前記運転支援制御の実行の継続に伴って生じる付随リスクを評価するステップと、
前記付随リスクの評価の結果に基づいて、前記規定時間を短縮するステップと、
を更に含むことを特徴とする車両の運転支援方法。
続きを表示(約 1,100 文字)
【請求項2】
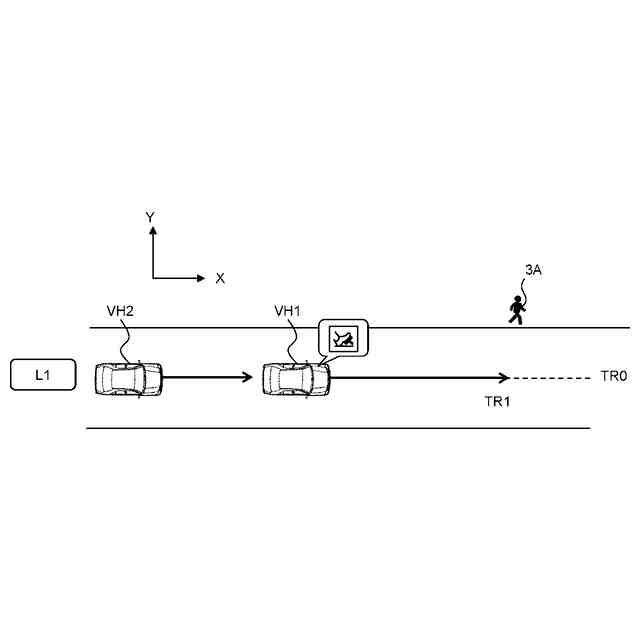
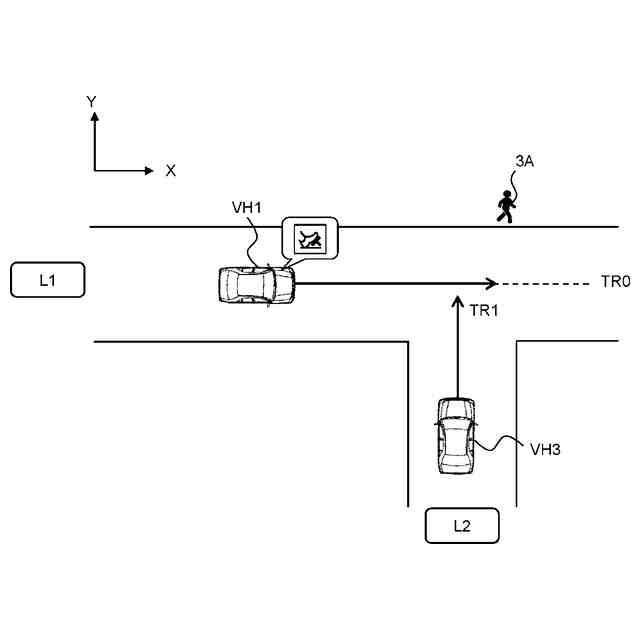
前記運転支援制御は、前記車両を減速する減速制御を含み、
前記付随リスクが、前記車両の後方を走行する他車両による追突リスク、前記車両の前方の交差点を前記車両の進行方向と交差する方向に走行する他車両との衝突リスク、及び、前記車両のスリップリスクの少なくとも1つを含む
ことを特徴とする請求項1に記載の車両の運転支援方法。
【請求項3】
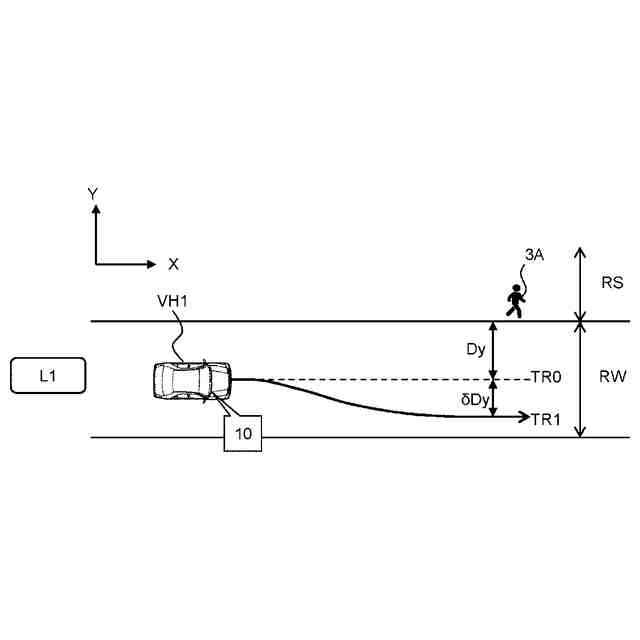
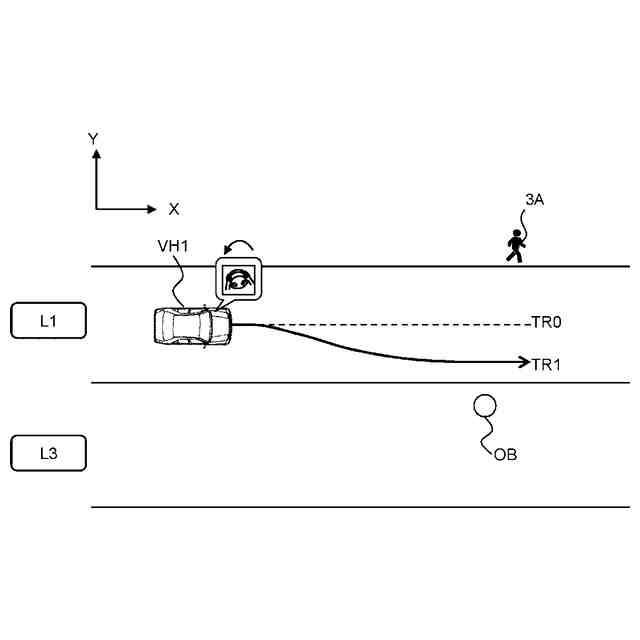
前記運転支援制御は、前記車両の操舵を制御する操舵制御を含み、
前記付随リスクが、前記リスク要因から離れる方向に存在してリスク要因に分類されない物体との接触リスク、及び、前記車両のスリップリスクの少なくとも1つを含む
ことを特徴とする請求項1又は2に記載の車両の運転支援方法。
【請求項4】
車両の運転を支援する装置であって、
前記車両の運転環境情報が格納される記憶装置と、
プロセッサと、
を備え、
前記プロセッサは、
前記運転環境情報に基づいて、前記車両の前方のリスク要因を回避するための運転支援制御を実行し、
前記運転支援制御の実行の開始後、前記車両の操作者による当該実行の中止を要求する車両操作が検出された場合、当該検出が継続する時間をカウントし、
前記車両操作の検出が継続する時間が規定時間を上回る場合、前記運転支援制御の実行を中止し、
前記プロセッサは、更に、
前記車両操作の検出が継続する時間のカウント中、前記運転環境情報に基づいて、前記運転支援制御の実行の継続に伴って生じる付随リスクを評価し、
前記付随リスクの評価の結果に基づいて、前記規定時間を短縮する
ことを特徴とする車両の運転支援装置。
【請求項5】
車両の運転を支援するプログラムであって、
前記車両の運転環境情報に基づいて、前記車両の前方のリスク要因を回避するための運転支援制御を実行する処理と、
前記運転支援制御の実行の開始後、前記車両の操作者による当該実行の中止を要求する車両操作が検出された場合、当該検出が継続する時間をカウントする処理と、
前記車両操作の検出が継続する時間が規定時間を上回る場合、前記運転支援制御の実行を中止する処理と、
前記車両操作の検出が継続する時間のカウント中、前記運転環境情報に基づいて、前記運転支援制御の実行の継続に伴って生じる付随リスクを評価する処理と、
前記付随リスクの評価の結果に基づいて、前記規定時間を短縮する処理と、
をコンピュータに実行させることを特徴とする車両の運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の運転を支援する方法、装置及びプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特開2019-026129号公報は、車両の運転を支援する方法を開示する。この従来の方法は、車両の前方の障害物との衝突を回避するための運転支援制御の実行の開始条件が満たされるか否かを判定する。この従来の方法は、また、運転支援制御の実行の許可条件が満たされるか否かを判定する。従来の方法では、開始条件が満たされる前に許可条件が満たされた場合、運転支援制御が実行される。一方、開始条件が満たされた場合であっても、その前に許可条件が満たされていないときは、運転支援制御の実行がキャンセルされる。
【先行技術文献】
【特許文献】
【0003】
特開2019-026129号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
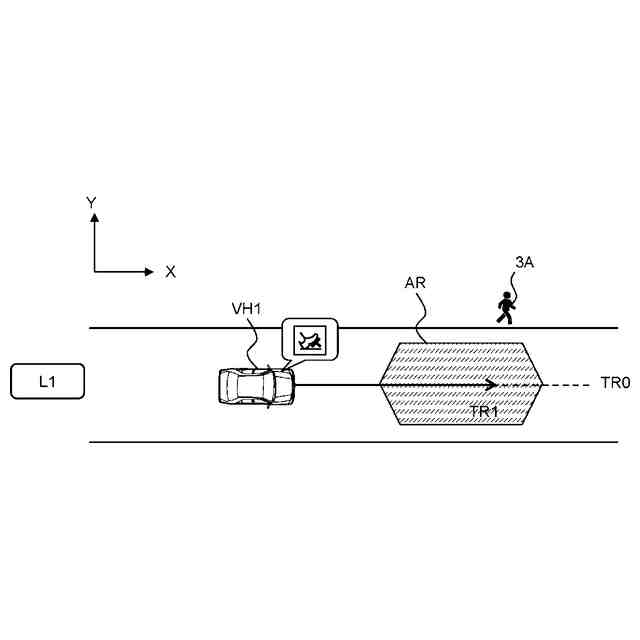
上記従来の方法は、車両が障害物と衝突しそうな状況において実行される運転支援制御と、その実行のキャンセルに関するものである。本願では、このような運転支援制御よりも一段階手前の状況、即ち、車両が障害物と衝突する可能性が高くない状況で実行される運転支援制御を考える。この運転支援制御は、車両の前方の歩行者等をリスク要因と見做し、このリスク要因を回避するために行われる。
【0005】
リスク要因を回避するための運転支援制御の実行を開始した後に、その実行を中止することを考える。この場合の手法としては、運転支援制御の実行の開始条件が満たされたタイミングから当該実行を開始しつつ、当該実行を中止する条件が満たされるか否かを判定することが挙げられる。また、この中止条件としては、運転支援制御の実行の中止を要求する所定の車両操作が継続的に検出されることが例示される。
【0006】
障害物との衝突を回避するための運転支援制御とは異なり、リスク要因を回避するためのそれは、実行中の運転支援制御の必要性を車両操作者に認識させることが難しい。そのため、必要性を未認識の車両操作者は、所定の車両操作を偶然行ってしまうことが考えられる。一方、この車両操作者が実行中の運転支援制御に基づく車両挙動に気付き、かつ、この運転支援制御の必要性を認識したときには、所定の車両操作を止めることが考えられる。一方、実行中の運転支援制御に基づく車両挙動に気付いたものの、この実行に同意しない車両操作者は、所定の車両操作を意図的に行うことが考えられる。そのため、所定の車両操作が継続的に検出されることは、中止条件として適当と考えられる。
【0007】
上述した手法によれば、開始条件が満たされたタイミングから中止条件が満たされたタイミングまでの間、運転支援制御が実行される。しかしながら、リスク要因を回避するための運転支援制御は、その実行を継続することが車両の走行安全性に影響を及ぼす新たなリスクを生じさせることがある。そのため、このような場合にも上述した手法に基づいて運転支援制御の実行の中止を判定することは実用的であるとは言い難く、故に、運転支援制御の実行を中止し易くするための改良が望まれる。
【0008】
本開示の1つの目的は、リスク要因を回避するための運転支援制御の実行の開始後において、この実行を適切に中止することのできる技術を提供することにある。
【課題を解決するための手段】
【0009】
本開示の第1の観点は、車両の運転を支援する方法であり、次の特徴を有する。
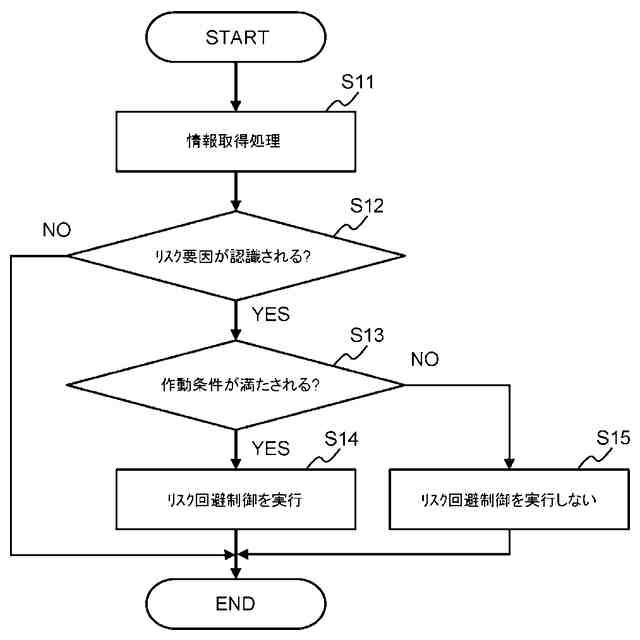
前記方法は、前記車両の運転環境情報に基づいて、前記車両の前方のリスク要因を回避するための運転支援制御を実行するステップと、前記運転支援制御の実行の開始後、前記車両の操作者による当該実行の中止を要求する車両操作が検出された場合、当該検出が継続する時間をカウントするステップと、前記車両操作の検出が継続する時間が規定時間を上回る場合、前記運転支援制御の実行を中止するステップと、を含む。
前記方法は、更に、前記車両操作の検出が継続する時間のカウント中、前記運転環境情報に基づいて、前記運転支援制御の実行の継続に伴って生じる付随リスクを評価するステップと、前記付随リスクの評価の結果に基づいて、前記規定時間を短縮するステップと、を含む。
【0010】
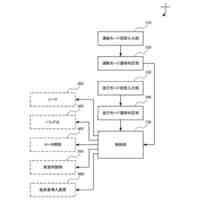
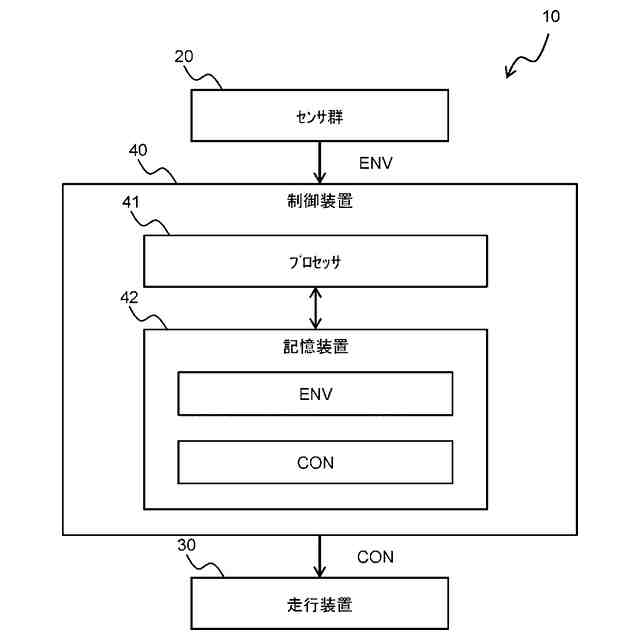
本開示の第2の観点は、車両の運転を支援する装置であり、次の特徴を有する。
前記装置は、前記車両の運転環境情報が格納される記憶装置と、プロセッサとを備える。前記プロセッサは、前記運転環境情報に基づいて、前記車両の前方のリスク要因を回避するための運転支援制御を実行し、前記運転支援制御の実行の開始後、前記車両の操作者による当該実行の中止を要求する車両操作が検出された場合、当該検出が継続する時間をカウントし、前記車両操作の検出が継続する時間が規定時間を上回る場合、前記運転支援制御の実行を中止する。前記プロセッサは、更に、前記車両操作の検出が継続する時間のカウント中、前記運転環境情報に基づいて、前記運転支援制御の実行の継続に伴って生じる付随リスクを評価し、前記付随リスクの評価の結果に基づいて、前記規定時間を短縮する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スーパーEV
1か月前
個人
骨組み型熱交換器
4日前
個人
自動車暴走抑制装置
11日前
日本精機株式会社
表示装置
2か月前
東レ株式会社
フロントグリル
11日前
個人
断熱構造体とその製造方法
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
オクト産業株式会社
自動車
1か月前
株式会社SUBARU
車両
2か月前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
1か月前
株式会社SUBARU
車両
2か月前
井関農機株式会社
作業車両
27日前
トヨタ自動車株式会社
車両
2か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社SUBARU
車両
21日前
株式会社SUBARU
車両
21日前
株式会社SUBARU
車両
21日前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本化薬株式会社
ガス発生器
1か月前
新明和工業株式会社
作業車両
1か月前
カヤバ株式会社
シリンダ装置
21日前
新明和工業株式会社
荷箱の天蓋装置
18日前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
1か月前
個人
トイレ付き水陸両用の電気自動車
2か月前
オムロン株式会社
表示システム
4日前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
乗員保護装置
1か月前
ダイハツ工業株式会社
搬送装置
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ