TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080974
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194420
出願日
2023-11-15
発明の名称
移動体の制御装置、移動体の制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/229 20240101AFI20250520BHJP(制御;調整)
要約
【課題】ロボットを、効率的に経由地点を経由して目的地まで走行させること。
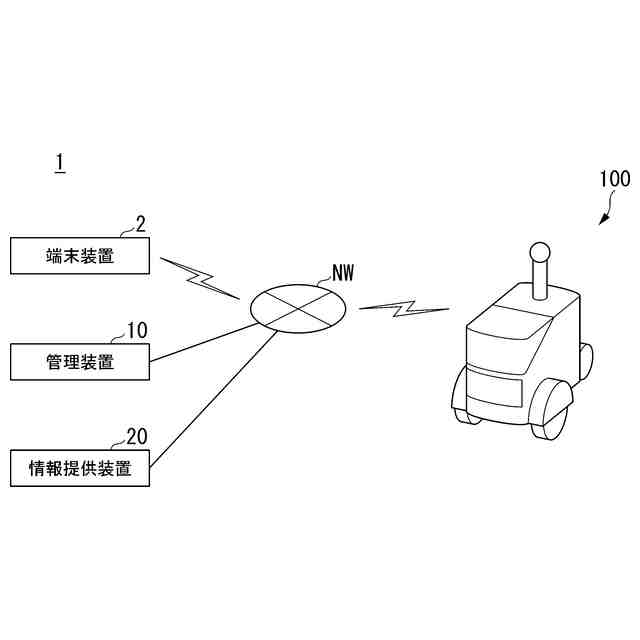
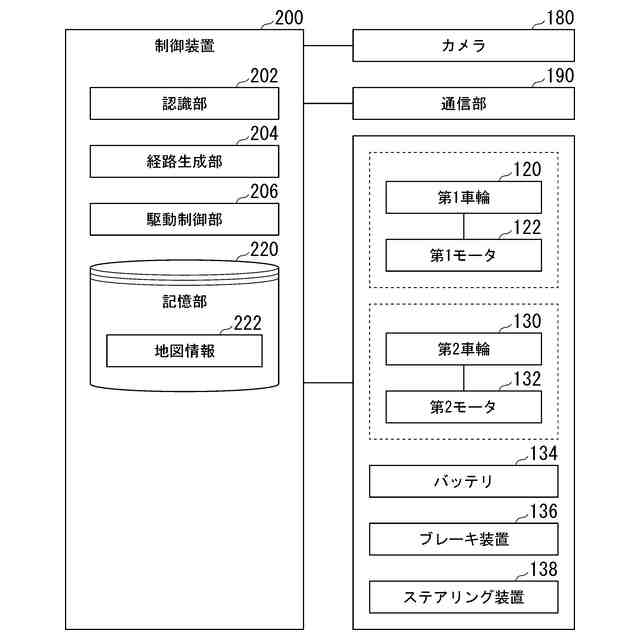
【解決手段】移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成する生成部と、生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、前記移動体が複数の前記経由地点のうちの第1経由地点に向けて走行する場合、前記生成部は、前記第1経由地点と、前記第1経由地点の次の経由地点である第2経由地点との間に、仮目的地点を設定し、前記制御部は、前記第1経由地点を経由して前記仮目的地点に向けて前記移動体を走行させる、移動体の制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成する生成部と、
生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、
前記移動体が複数の前記経由地点のうちの第1経由地点に向けて走行する場合、前記生成部は、前記第1経由地点と、前記第1経由地点の次の経由地点である第2経由地点との間に、仮目的地点を設定し、前記制御部は、前記第1経由地点を経由して前記仮目的地点に向けて前記移動体を走行させる、
移動体の制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記移動体が前記第1経由地点に到達した場合、前記生成部は、前記仮目的地点を削除し、前記第2経由地点と、前記第2経由地点の次の経由地点である第3経由地点との間に、次の仮目的地点を設定し、前記制御部は、前記第2経由地点を経由して前記次の仮目的地点に向けて前記移動体を走行させる処理を繰り返す、
請求項1に記載の移動体の制御装置。
【請求項3】
前記生成部は、前記移動体と前記第1経由地点との間の距離が閾値以下となった場合、前記仮目的地点を設定する、
請求項1に記載の移動体の制御装置。
【請求項4】
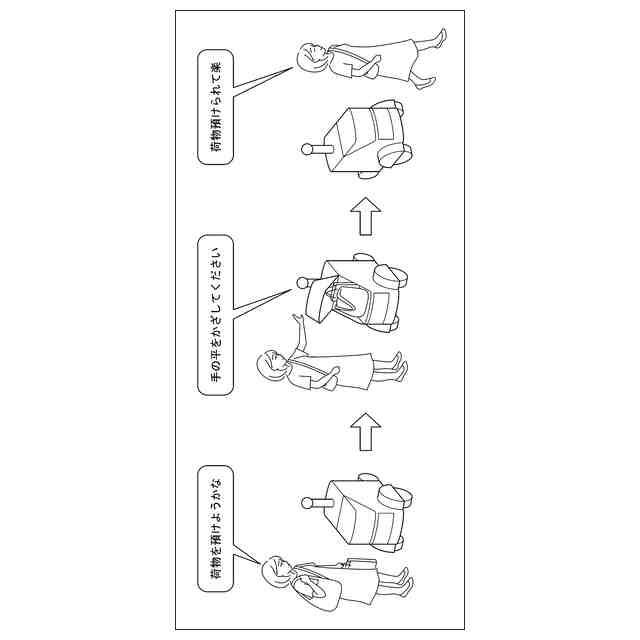
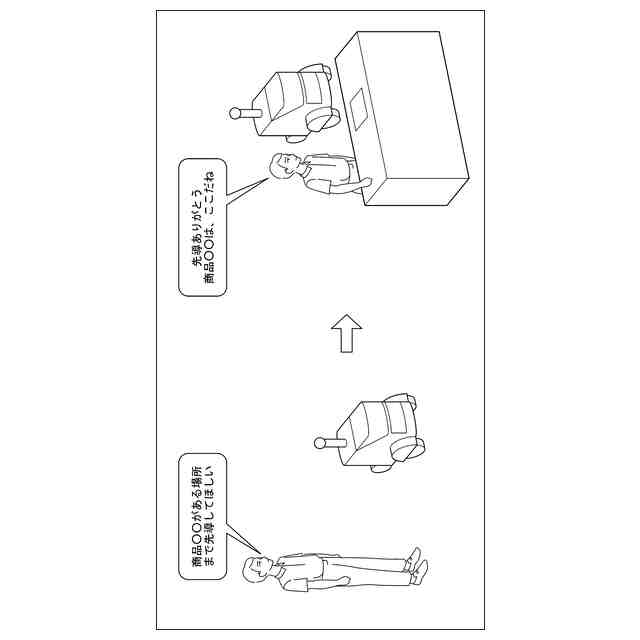
前記移動体は、ユーザを追従するように移動する追従モードと、前記ユーザの前を前記ユーザの移動速度に合わせて移動する誘導モードとのいずれかのモードにおいて動作する、
請求項1に記載の移動体の制御装置。
【請求項5】
前記移動体が前記追従モードにおいて動作する場合、前記目的地は前記ユーザ又は前記ユーザから所定範囲内の地点である、
請求項4に記載の移動体の制御装置。
【請求項6】
前記移動体が前記誘導モードにおいて動作する場合、前記目的地は前記ユーザによって設定された地点、または前記ユーザの前方の所定範囲内の地点である、
請求項4に記載の移動体の制御装置。
【請求項7】
前記移動体が前記誘導モードにおいて動作する場合、前記目的地は、前記ユーザによって設定された目的地点に到達するために暫定的に設定された暫定地点である、
請求項4に記載の移動体の制御装置。
【請求項8】
前記移動体が前記誘導モードにおいて動作する場合、前記目的地は、地図情報又は前記ユーザの動作に基づいて推定された地点である、
請求項4に記載の移動体の制御装置。
【請求項9】
前記第2経由地点は、前記目的地である、
請求項1に記載の移動体の制御装置。
【請求項10】
コンピュータが、
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識し、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成し、
生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御し、
前記移動体が複数の前記経由地点のうちの第1経由地点に向けて走行する場合、前記第1経由地点と、前記第1経由地点の次の経由地点である第2経由地点との間に、仮目的地点を設定し、前記第1経由地点を経由して前記仮目的地点に向けて前記移動体を走行させる、
移動体の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御装置、移動体の制御方法、およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、ユーザを所望の場所に案内したり、荷物を搬送したりするロボットが知られている(例えば、特許文献1参照)。上記のロボットは、最大移動速度と、環境内の各エリアのそれぞれとを対応づけた移動速度データベースを参照して、設定した最大移動速度を上限とした移動速度となるように移動するものである。
【先行技術文献】
【特許文献】
【0003】
特開2012-111011号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
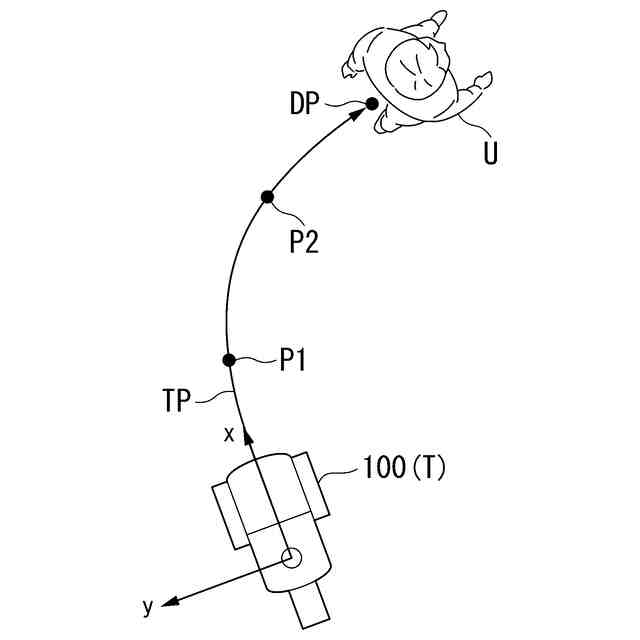
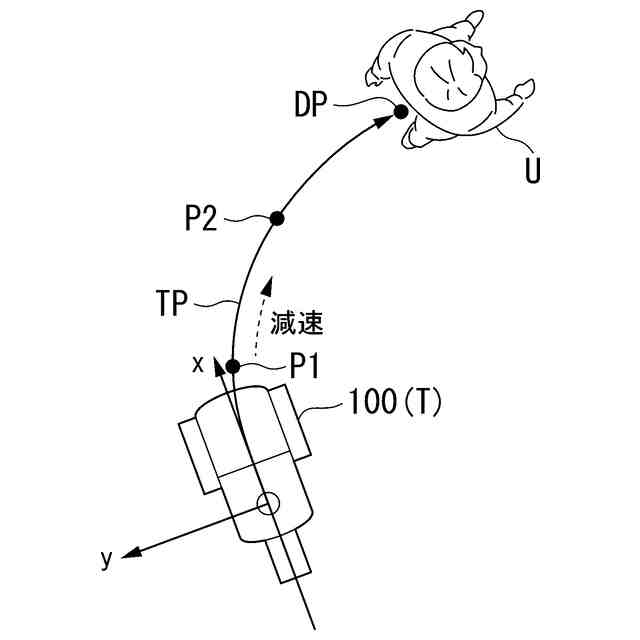
一般的に、従来技術のロボットは、目的地に向けた経路を生成する際に、複数の経由地点を生成し、これら経由地点を連結することによって経路を生成するものである。その後、ロボットは、これら経由地点を通過しつつ、目的地に向けて走行する。しかしながら、従来技術では、ロボットが各経由地点を通過する際に、当該経由地点を暫定的な目的地として設定し、設定された目的地を確実に通過するよう制御されるため、ロボットは、経由地点の手前で減速制御される場合があった。その結果、ロボットは効率的に経由地点を経由して目的地まで走行できない場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、ロボットを、効率的に経由地点を経由して目的地まで走行させることができる移動体の制御装置、移動体の制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る移動体の制御装置、移動体の制御方法、およびプログラムは、以下の構成を採用した。
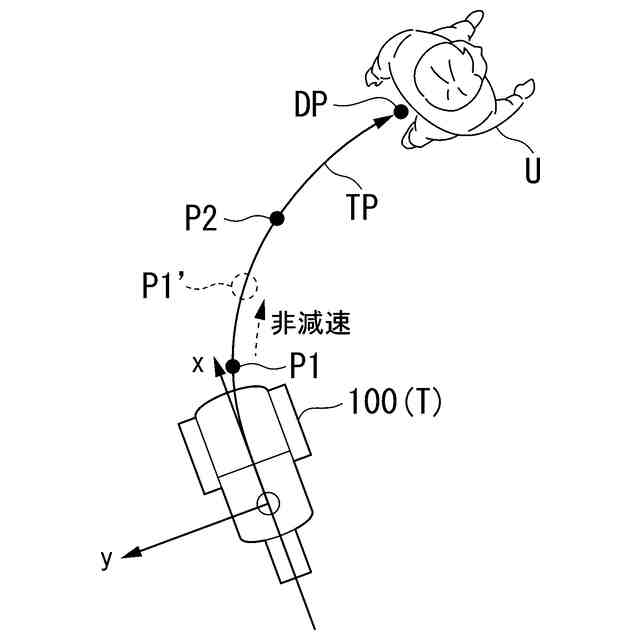
(1):この発明の一態様に係る移動体の制御装置は、移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成する生成部と、生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、前記移動体が複数の前記経由地点のうちの第1経由地点に向けて走行する場合、前記生成部は、前記第1経由地点と、前記第1経由地点の次の経由地点である第2経由地点との間に、仮目的地点を設定し、前記制御部は、前記第1経由地点を経由して前記仮目的地点に向けて前記移動体を走行させるものである。
【0007】
(2):上記(1)の態様において、前記移動体が前記第1経由地点に到達した場合、前記生成部は、前記仮目的地点を削除し、前記第2経由地点と、前記第2経由地点の次の経由地点である第3経由地点との間に、次の仮目的地点を設定し、前記制御部は、前記第2経由地点を経由して前記次の仮目的地点に向けて前記移動体を走行させる処理を繰り返すものである。
【0008】
(3):上記(1)の態様において、前記生成部は、前記移動体と前記第1経由地点との間の距離が閾値以下となった場合、前記仮目的地点を設定するものである。
【0009】
(4):上記(1)の態様において、前記移動体は、ユーザを追従するように移動する追従モードと、前記ユーザの前を前記ユーザの移動速度に合わせて移動する誘導モードとのいずれかのモードにおいて動作するものである。
【0010】
(5):上記(1)の態様において、前記移動体が前記追従モードにおいて動作する場合、前記目的地は前記ユーザ又は前記ユーザから所定範囲内の地点であるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
トヨタ自動車株式会社
ペダル機構
9日前
株式会社ダイフク
搬送設備
10日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
自己位置推定装置
19日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
17日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
10日前
WHILL株式会社
電動モビリティ
18日前
日本信号株式会社
自走式装置
24日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
1か月前
井関農機株式会社
作業車両
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
2日前
株式会社ダイヘン
移動体、及び誘導線検出装置
2日前
株式会社デンソー
診断装置
1か月前
株式会社アイシン
自律移動体
24日前
株式会社アイシン
自律移動体
24日前
ローム株式会社
バイアス回路
1か月前
株式会社アイシン
自律移動体
24日前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
株式会社アイシン
自律移動体
24日前
株式会社東海理化電機製作所
ペダル装置
5日前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
株式会社ダイヘン
情報処理装置
17日前
株式会社マキタ
作業ロボット
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ