TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076937
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188919
出願日
2023-11-02
発明の名称
走行制御装置及び走行制御システム
出願人
古河ユニック株式会社
代理人
個人
,
個人
,
個人
主分類
B66C
23/44 20060101AFI20250509BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】設計、製造及び整備コストの増加を抑制しながら、旋回操作時にクローラの走行段を自動的に切り替えることが可能な走行装置及び走行制御システムを提供すること。
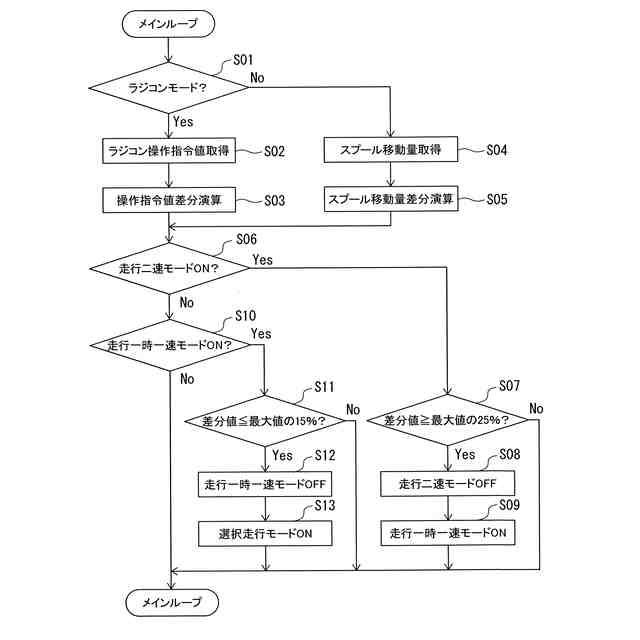
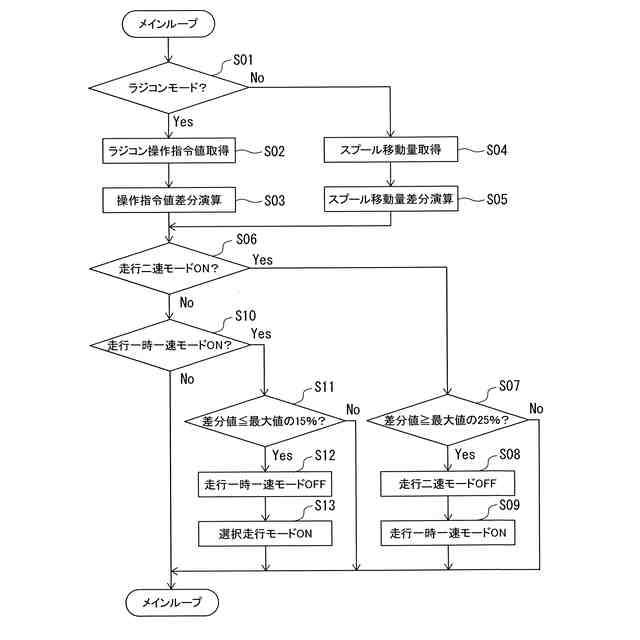
【解決手段】走行二速モードに設定されていた場合(S06:YES)、旋回判定部43は、演算した差分値が高速段判定値以上であるか、即ち操作指令値又はスプール動作量の最大値の25%以上であるか判定する(S07)。25%以上であった場合(S07:YES)は、旋回操作が行われたと判定し、走行二速モードをOFFにし(S08)、走行一時一速モード(S09)をONにする。差分値が最大値の25%よりも小さかった場合(S07:NO)には、特に処理を行わず、処理を最初から繰り返す。
【選択図】図9
特許請求の範囲
【請求項1】
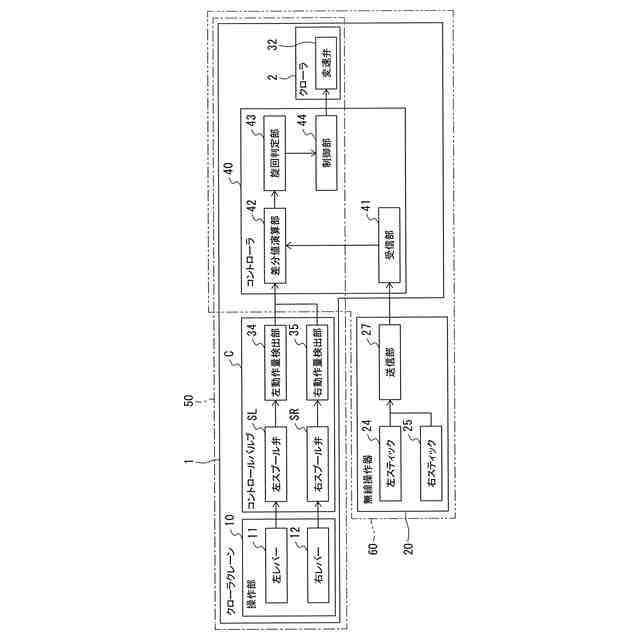
機体の左右それぞれにクローラを備え、該クローラのそれぞれが変速機構を備えた流体圧モータによって駆動する産業用機械の走行制御装置であって、
左右の前記クローラを操作するための操作部と、
前記操作部に対して旋回操作が行われたか判定する旋回判定部と、
該旋回判定部の判定に基づいて、前記流体圧モータの走行段を切り替えるための制御を行う制御部と、を備えており、
前記流体圧モータは、走行段を少なくとも低速段と高速段との二段階に設定可能であり、
前記制御部は、前記旋回判定部が旋回操作を行っていると判定している間、前記流体圧モータの走行段を前記低速段に設定させることを特徴とする走行制御装置。
続きを表示(約 2,100 文字)
【請求項2】
前記制御部は、操作者の操作によって走行モードが低速段モード又は高速段モードに設定され、
前記低速段モードのときには前記変速機構を低速段に設定し、前記高速段モードのときには前記変速機構を前記高速段に設定し、該高速段モードのときに、前記旋回判定部が旋回操作を行っていると判定している間、一時低速モードとして前記走行段を前記低速段に設定し、前記一時低速モードのときに、前記旋回判定部が旋回操作を行っていないと判定した場合、操作者が選択している走行モードに設定することを特徴とする請求項1に記載の走行制御装置。
【請求項3】
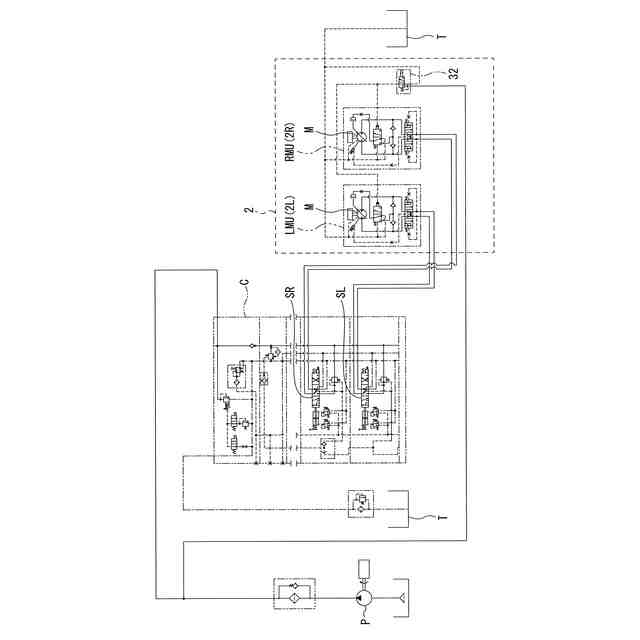
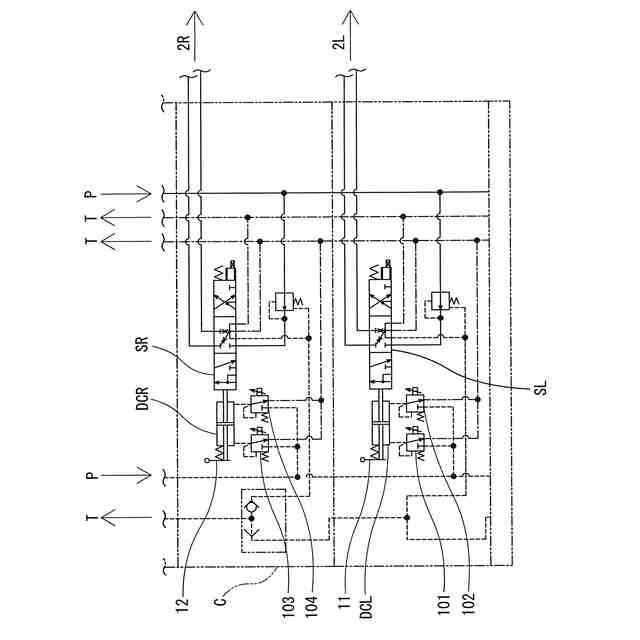
前記産業用機械は、前記流体圧モータに供給される作動流体の向き及び流量を調節するためのコントロールバルブを備えており、
該コントロールバルブには、左側の前記クローラに対応する前記流体圧モータに接続された左スプール弁と、右側の前記クローラに対応する前記流体圧モータに接続された右スプール弁とが内蔵されており、
前記左スプール弁には、スプールの動作量を検出する左動作量検出部が備えられ、
前記右スプール弁には、スプールの動作量を検出する右動作量検出部が備えられており、
前記旋回判定部は、前記左動作量検出部の検出値と、前記右動作量検出部の検出値とに所定の差が生じているとき、旋回操作を行っていると判定することを特徴とする請求項1に記載の走行制御装置。
【請求項4】
前記所定の差は、前記右スプール弁及び前記左スプール弁の最大駆動量の15%以上25%以下の所定の値であることを特徴とする請求項3に記載の走行制御装置。
【請求項5】
前記所定の差は、前記流体圧モータが高速段に設定されているときには高速段判定値に設定され、低速段に設定されているときには低速段判定値に設定されており、
前記高速段判定値は、前記低速段判定値よりも大きい値に設定されることを特徴とする請求項4に記載の走行制御装置。
【請求項6】
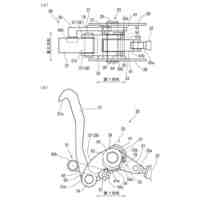
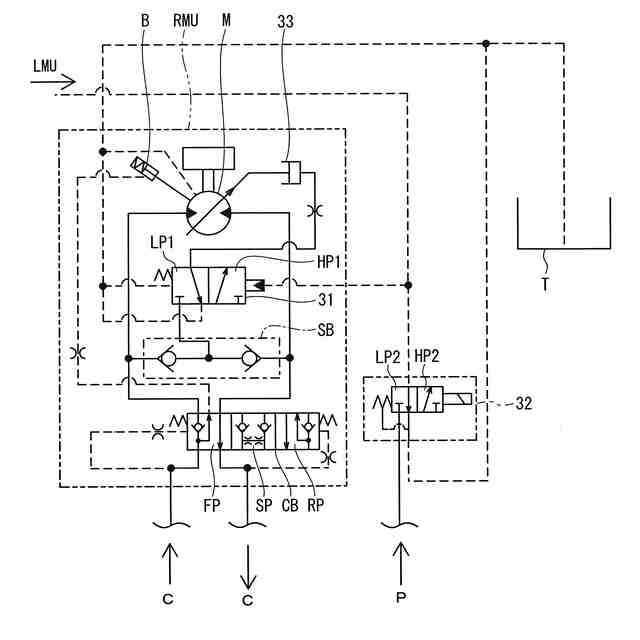
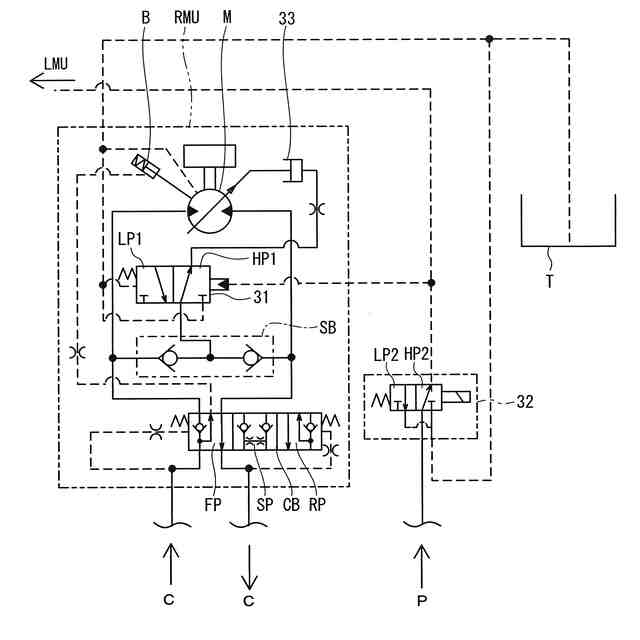
前記流体圧モータには、該流体圧モータに圧油を供給する駆動用流路と、前記変速機構を動作させるための変速用流路とが接続されており、
前記変速機構は、作動流体圧力によって走行段を変化させ、
前記変速用流路は、前記変速機構の動作を制御するパイロット弁である切換弁と、該切換弁の動作を制御するソレノイド弁である変速制御弁とを備えており、
前記切換弁は、前記走行段を、高速段に設定させる高速位置と、低速段に設定させる低速位置とに切り替え可能であり、
前記変速制御弁は、前記切換弁のパイロットポートをポンプに接続する高速指令位置と、前記パイロットポートを作動流体タンクに接続する低速指令位置とに切り替え可能であり、
前記制御部は、前記旋回判定部が旋回操作を行っていると判定している間、前記変速制御弁を低速指令位置に設定することを特徴とする請求項1から請求項5のいずれかに記載の走行制御装置。
【請求項7】
機体の左右それぞれにクローラを備え、該クローラのそれぞれが変速機構を備えた流体圧モータによって駆動する産業用機械と、
前記クローラの操作指令値を入力するための操作部を備えた遠隔操作器と、を備えた走行制御システムであって、
前記遠隔操作器から送信された操作指令値に基づいて、旋回操作が行われたか判定する旋回判定部と、
該旋回判定部の判定に基づいて、前記流体圧モータの走行段を切り替える制御を行う制御部と、を備えており、
前記流体圧モータは、走行段を低速段と高速段との少なくとも二段階に設定可能であり、
前記制御部は、前記旋回判定部が旋回操作を行っていると判定している間、前記クローラの走行段を前記低速段に設定することを特徴とする走行制御システム。
【請求項8】
前記制御部は、操作者の操作によって走行モードが低速段モード又は高速段モードに設定され、前記低速段モードのときには前記変速機構を低速段に設定し、前記高速段モードのときには前記変速機構を前記高速段に設定し、該高速段モードのときに前記旋回判定部が旋回操作を行っていると判定している間、一時低速モードとして前記走行段を前記低速段に設定し、前記一時低速モードのときに、前記旋回判定部が旋回操作を行っていないと判定した場合、操作者が選択している走行モードに設定することを特徴とする請求項7に記載の走行制御システム。
【請求項9】
前記旋回判定部は、前記遠隔操作器に入力された左側の前記クローラに対応する前記流体圧モータの操作指令値と右側の前記クローラに対応する前記流体圧モータの操作指令値とに所定の差が生じているとき、旋回操作を行っていると判定することを特徴とする請求項7に記載の走行制御システム。
【請求項10】
前記所定の差は操作指令値の最大値の15%以上25%以下の所定の値であることを特徴とする請求項9に記載の走行制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用機械の走行制御装置及び走行制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、左右に一対のクローラを備えた産業用機械には、低速ではあるが高トルクを発揮可能な一速と、低トルクではあるが高速で走行可能な二速の、二段階の走行段を有しているものがある。
このような産業用機械を走行させるとき、操作者は、直進時等の走行抵抗が低い場合には二速を使用して走行し、走行抵抗が増大する旋回時には一速を使用することで、旋回性能を向上させる場合がある。
【0003】
上記のような走行段の切り替え操作は、操作レバーの付近に備えられている変速スイッチを操作して行う。しかし、変速スイッチを操作するためには操作レバーから手を離さなければならないため、一旦産業用機械を停止させ、変速操作を行ってから再度走行操作を行う必要がある。また、運転席が備えられており、変速スイッチが床に配置されているような場合であっても、円滑に走行させようとする場合は、操作レバーの操作を行いながら、タイミングよく変速スイッチを操作する必要がある。そのため、変速操作を交えた走行操作を行うためには一定の習熟が要求される。
【0004】
そこで、走行操作時における操作者の負担を軽減させるための要素として、特許文献1には、油圧モータの駆動回路中に自動切換弁を備える構成について開示されている。自動切換弁は、モータの負荷の大きさにより低速と高速との切り替えを自動的に行う。
【0005】
特許文献1に開示されている切換弁の構造を簡単に説明すると、油圧モータ及びコントロールピストンへの流路を制御する中空2速スプール、操作者の入力によって圧力が供給される中空2速スプールを二速位置に設定する外部パイロットポート、油圧モータの駆動圧力が供給される第一小径スプール及び第二小径スプール及び変速操作が行われていない間に中空2速スプールを一速位置に復帰させるためのスプリングが備えられている。
【0006】
この切換弁は、自動変速を行うために、第二小径スプールの受圧面積が第一小径スプールの受圧面積よりも小さく形成されている。この構造によって、油圧モータの負荷上昇に伴って作動油圧力が上昇したときに、第二小径スプールに掛かる作動力が第一小径スプールに掛かる作動力を大きく上回り、第一小径スプールと外部パイロットポートとに掛かる作動力の合力よりも、第二小径スプールとスプリングとの合力が大きくなり、中空2速スプールが特許文献1の図1に示されている位置(一速位置)まで移動する。
そのため、自動変速弁が二速位置に位置していても、油圧モータの駆動圧力が所定の値を超えたとき、走行段が自動的に一速に切り替わる。
このように、油圧モータに掛かる圧力の変化によって走行段が切り替わるため、操作者が走行段を切り替える操作を行わずに走行操作を行うことができる。
【先行技術文献】
【特許文献】
【0007】
特開2015-017684号広報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、このような自動変速機構は、外部パイロットポートへの供給圧力や、第一小径スプールと第二小径スプールとの受圧面積比に加え、スプリングの付勢力を適切な値に設定しなければならず、また、多数の流路が自動切換え弁に接続されるため構造が複雑化しやすい。
そのため、油圧モータユニットの製造コスト及び整備コストを増加させる原因となる。
また、油圧モータの大きさが異なる機種への適用時や、同一機種であってもマイナーチェンジを行ったときには上記構造の再設計が必要になるため、設計コストも低減させにくい。
【0009】
このような実情に鑑み、本発明は、設計、製造及び整備コストの増加を抑制しながら、旋回操作時にクローラの走行段を自動的に切り替えることが可能な走行装置及び走行制御システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
第一の発明は、機体の左右それぞれにクローラを備え、該クローラのそれぞれが変速機構を備えた流体圧モータによって駆動する産業用機械の走行制御装置であって、左右の前記クローラを操作するための操作部と、前記操作部に対して旋回操作が行われたか判定する旋回判定部と、該旋回判定部の判定に基づいて、前記流体圧モータの走行段を切り替えるための制御を行う制御部と、を備えており、前記流体圧モータは、走行段を少なくとも低速段と高速段との二段階に設定可能であり、前記制御部は、前記旋回判定部が旋回操作を行っていると判定している間、前記流体圧モータの走行段を前記低速段に設定させることを特徴とする走行制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
8か月前
ユニパルス株式会社
吊具
11か月前
個人
海上コンテナ昇降装置
5か月前
ユニパルス株式会社
吊具装置
6か月前
ユニパルス株式会社
荷役装置
4か月前
株式会社豊田自動織機
産業車両
6か月前
株式会社豊田自動織機
荷役車両
10か月前
ユニパルス株式会社
リフト装置
5日前
水戸工業株式会社
吊り具
1か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
4か月前
大栄産業株式会社
クランプ
13日前
白山工業株式会社
バランサ
2か月前
株式会社日本キャリア工業
昇降機
9か月前
ユニパルス株式会社
荷役助力装置
1か月前
株式会社ユピテル
システム等
1か月前
個人
建築部材の吊り上げ装置
7か月前
株式会社キトー
タイヤ用吊具
1か月前
新英運輸株式会社
自動車用台車
1か月前
株式会社豊田自動織機
フォークリフト
10か月前
フジテック株式会社
エレベータ
4か月前
株式会社大林組
養生方法
8か月前
株式会社豊田自動織機
フォークリフト
3か月前
ウエダ産業株式会社
鋼板保持装置
9か月前
株式会社タダノ
高所作業車
7か月前
ブラザー工業株式会社
架台
11か月前
ブラザー工業株式会社
架台
11か月前
フジテック株式会社
エスカレータ
1か月前
中坪造園有限会社
吊り荷降ろし具
6日前
小野谷機工株式会社
ジャッキ装置
11か月前
株式会社キトー
吊具
8か月前
白山工業株式会社
腕重量補償機構
7か月前
有限会社サエキ
玉掛用器具
5か月前
株式会社大林組
作業システム
8か月前
株式会社慧泉
搬送装置
11か月前
株式会社キトー
巻上機
10か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ