TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024101581
公報種別
公開特許公報(A)
公開日
2024-07-30
出願番号
2023005547
出願日
2023-01-18
発明の名称
荷役車両
出願人
株式会社豊田自動織機
代理人
主分類
B66F
9/18 20060101AFI20240723BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】円柱形状の荷を確実にクランプすることが可能な荷役車両の提供にある。
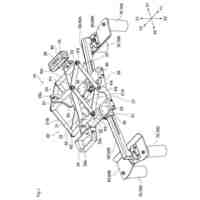
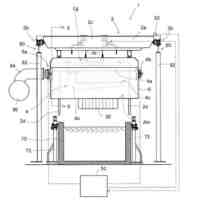
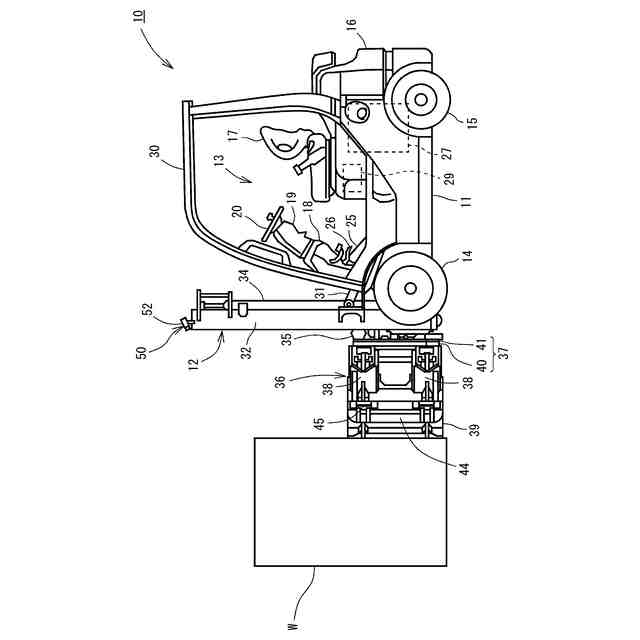
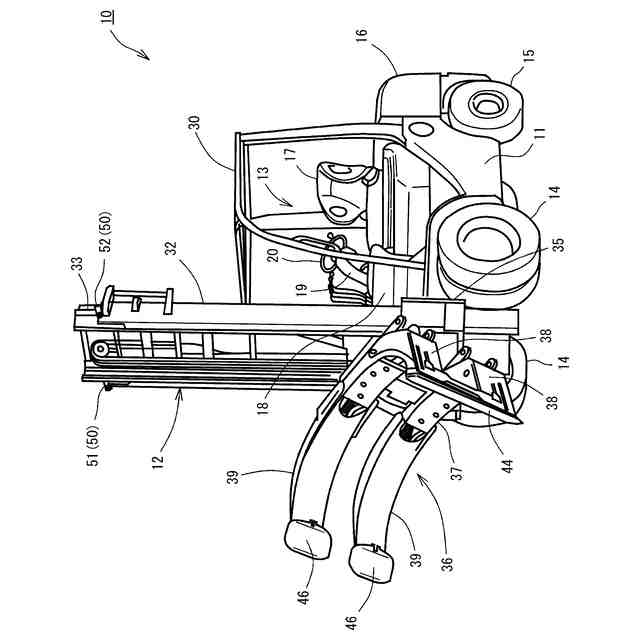
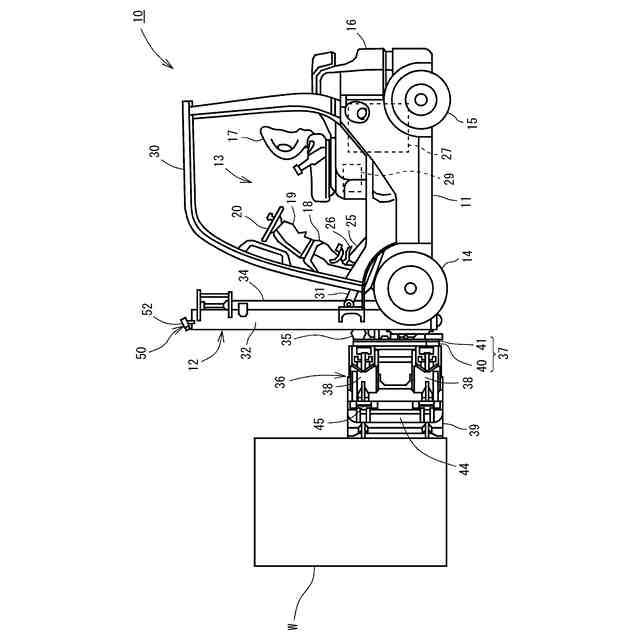
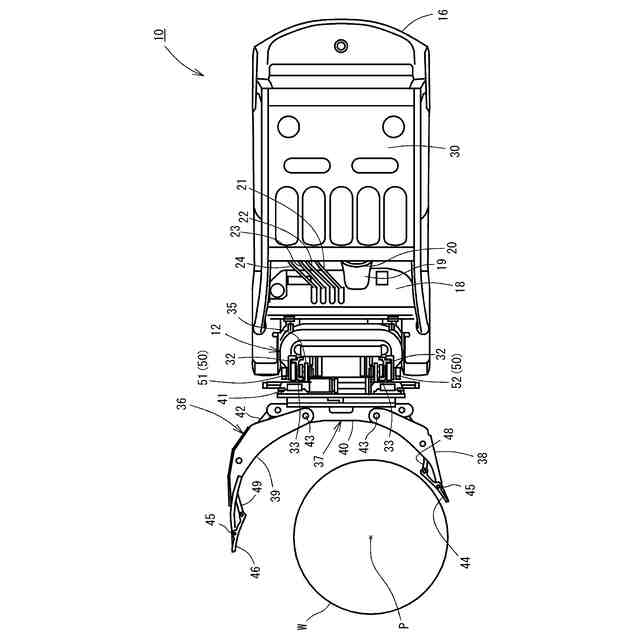
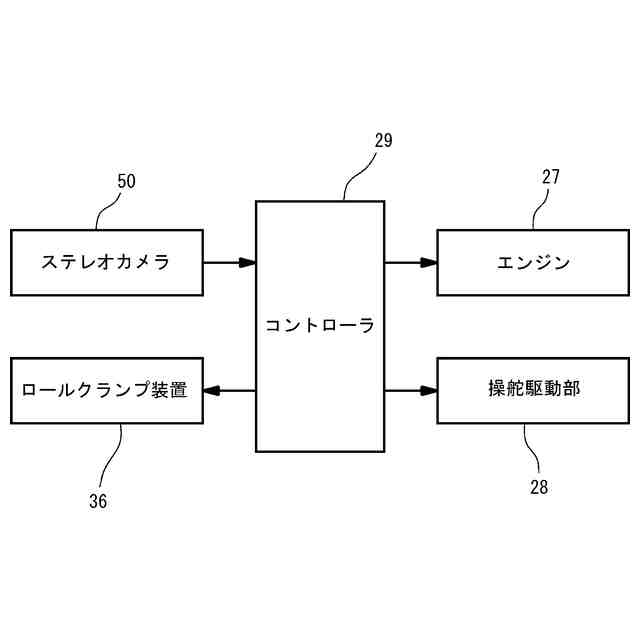
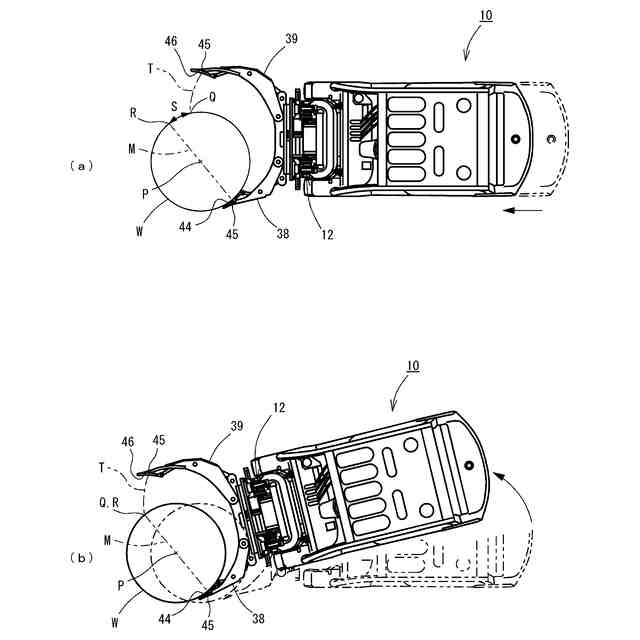
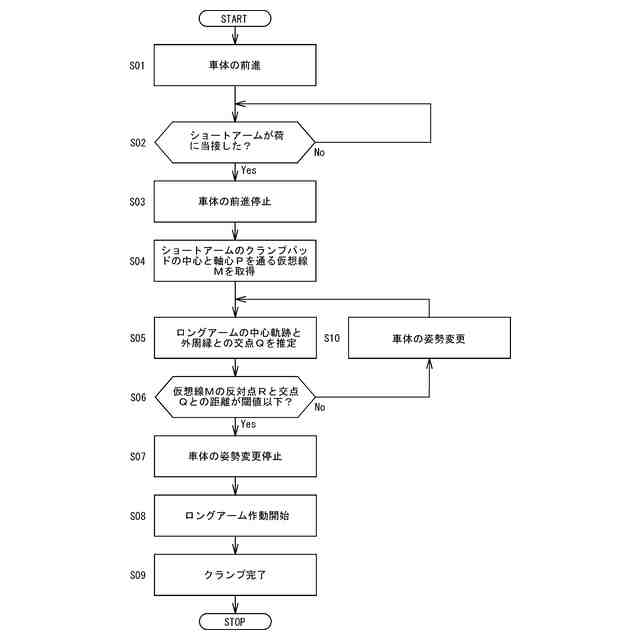
【解決手段】車体11と、走行駆動部と、操舵駆動部と、円柱形状の荷Wを把持可能な一対のクランプアーム38、39を有するロールクランプ装置36と、走行駆動部、操舵駆動部およびロールクランプ装置36を制御するコントローラ29と、を有する荷役車両である。荷Wおよび一対のクランプアーム38、39の先端部を検出可能とする物体検出器を有し、コントローラ29は、物体検出器の検出に基づいてクランプアーム38の当接位置と荷Wの軸心とを通る仮想線を取得し、クランプアーム39の先端部の中心軌跡と荷Wの外周縁との交点を推定し、交点が仮想線における当接位置と反対となる外周縁との交点である反対点に近づくように走行駆動部および操舵駆動部を制御し、車体11の位置を移動させる。
【選択図】 図2
特許請求の範囲
【請求項1】
駆動輪および操舵輪を備える車体と、
前記車体に搭載され、前記駆動輪を駆動する走行駆動部と、
前記操舵輪を操舵する操舵駆動部と、
前記車体の前部に備えられるマストと、
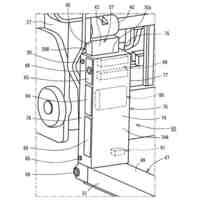
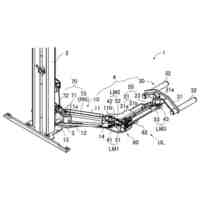
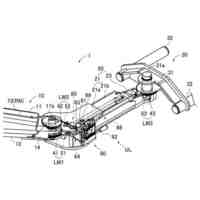
前記マストに対して昇降可能であって、円柱形状の荷を把持可能な一対のクランプアームを有するロールクランプ装置と、
前記走行駆動部、前記操舵駆動部および前記ロールクランプ装置を制御するコントローラと、を有する荷役車両において、
荷および前記一対のクランプアームの先端部を検出可能とする物体検出器を有し、
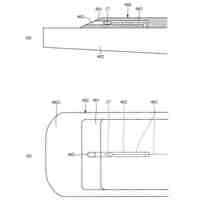
前記コントローラは、前記一対のクランプアームの一方のアームの先端部が荷の外周面に当接する際に、前記物体検出器の検出に基づいて、前記一方のアームの当接位置と荷の軸心とを通る仮想線を取得し、前記一対のクランプアームの他方のアームの先端部の中心軌跡と荷の外周縁との交点を推定し、前記交点が前記仮想線における前記当接位置と反対となる前記外周縁との交点である反対点に近づくように前記走行駆動部および前記操舵駆動部を制御し、前記車体の位置を移動させることを特徴とする荷役車両。
続きを表示(約 260 文字)
【請求項2】
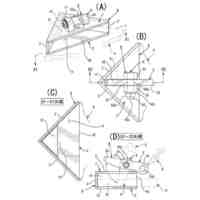
前記物体検出器は、前記一対のクランプアームの先端部を撮像可能とするカメラであり、
前記カメラにより撮像されたカメラ画像を画像処理する画像処理部を有することを特徴とする請求項1記載の荷役車両。
【請求項3】
前記カメラは、前記マストの上部に設けられることを特徴とする請求項2記載の荷役車両。
【請求項4】
前記コントローラは、前記一方のアームが荷に当接したとき、前記物体検出器の検出に基づいて前記交点を推定することを特徴とする請求項1又は2記載の荷役車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、円柱形状の荷をクランプすることが可能なロールクランプ装置を備える荷役車両に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
荷役車両の従来の技術として、例えば、特許文献1に開示されたロールクランプ装置が知られている。特許文献1に開示されたロールクランプ装置では、フォークリフトに装着される基盤の前面に、対向する一対のショートアームとスイングアームを有するクランプホルダがクランプ位置修正装置を介して配置されている。クランプ位置修正装置は、ショート側クランプパッドの取付軸を中心とする円弧状のガイド溝を有するガイドブラケットと、そのガイド溝に沿って移動するガイドロッドと、駆動源としての油圧シリンダと、から構成されている。このため、ショート側クランプパッドをロール紙に当接した状態でクランプホルダが回動されることで、スイング側クランプパッドのロール紙に対する当接位置が修正可能である。つまり、この種のロールクランプ装置によれば、一方のクランプアームをロール紙に当接後、車両操作を伴うことなく、他方のクランプアームのロール紙に対する当接位置を修正移動することができる。
【先行技術文献】
【特許文献】
【0003】
特開2000-229793号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ロール紙のような円柱形状の荷をロールクランプ装置によりクランプする場合、ロールクランプ装置を備える荷役車両のオペレータの技量によって作業効率の多寡が決まる。また、オペレータが操作を行わない無人運転では、荷に対して適切な位置にクランプアームを当接させる必要がある。しかしながら、特許文献1に開示されたロールクランプ装置は、クランプアームがロール紙の外周縁において適切な位置で当接されるか否かはオペレータが判断する必要がある。また、特許文献1に開示されたロールクランプ装置は、無人運転による円柱形状の荷をクランプすることは困難である。
【0005】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、円柱形状の荷を確実にクランプすることが可能な荷役車両の提供にある。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明は、駆動輪および操舵輪を備える車体と、前記車体に搭載され、前記駆動輪を駆動する走行駆動部と、前記操舵輪を操舵する操舵駆動部と、前記車体の前部に備えられるマストと、前記マストに対して昇降可能であって、円柱形状の荷を把持可能な一対のクランプアームを有するロールクランプ装置と、前記走行駆動部、前記操舵駆動部および前記ロールクランプ装置を制御するコントローラと、を有する荷役車両において、荷および前記一対のクランプアームの先端部を検出可能とする物体検出器を有し、前記コントローラは、前記一対のクランプアームの一方のアームの先端部が荷の外周面に当接する際に、前記物体検出器の検出に基づいて、前記一方のアームの当接位置と荷の軸心とを通る仮想線を取得し、前記一対のクランプアームの他方のアームの先端部の中心軌跡と荷の外周縁との交点を推定し、前記交点が前記仮想線における前記当接位置と反対となる前記外周縁との交点である反対点に近づくように前記走行駆動部および前記操舵駆動部を制御し、前記車体の位置を移動させることを特徴とする。
【0007】
本発明では、円柱形状の荷および一対のクランプアームの先端部を検出可能とする物体検出器を有する。コントローラは、一対のクランプアームの一方のアームの先端部が荷の外周面に当接する際に、物体検出器の検出に基づいて一方のアームの当接位置と荷の軸心とを通る仮想線を取得し、一対のクランプアームの他方のアームの先端部の中心軌跡と荷の外周縁との交点を推定する。そして、コントローラは、交点が仮想線における当接位置と反対となる外周縁との交点である反対点に近づくように走行駆動部および操舵駆動部を制御し、車体の位置を移動させる。このため、荷役車両は円柱形状の荷を確実にクランプすることが可能となる。
【0008】
また、上記の荷役車両において、前記物体検出器はカメラであり、前記カメラにより撮像されたカメラ画像を画像処理する画像処理部を有する構成としてもよい。
この場合、画像処理部によりカメラが撮像したカメラ画像を画像処理することで、コントローラは、円柱形状の荷の外周縁における他方のアームの先端の当接位置を推定することができる。
【0009】
また、上記の荷役車両において、前記カメラは、前記マストの上部に設けられる構成としてもよい。
この場合、カメラがマストの上部に設けられることで、一対のクランプアームが円柱形状の荷をクランプする際、カメラが荷の外周縁を撮像しやすくすることができる。このため、コントローラは、カメラ画像の画像処理により一方のアームが荷の外周面に当接することを検出することができる。
【0010】
また、上記の荷役車両において、前記コントローラは、前記一方のアームが荷に当接したとき、物体検出器の検出に基づいて前記交点を推定する構成としてもよい。
この場合、一方のアームが円柱形状の荷に当接したとき、コントローラが物体検出器の検出に基づいて他方のアームの先端部の中心軌跡と荷の外周縁との交点を推定する。このため、一方のアームが当接されたとき、コントローラは、他方のアームの先端部の当接位置を推定でき、他方のアームの先端部が荷のクランプに適切な位置か判別することができる。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
自走手摺
2日前
個人
懸吊装置
10か月前
ユニパルス株式会社
吊具
1か月前
個人
海上コンテナ昇降装置
7か月前
ユニパルス株式会社
吊具装置
7か月前
ユニパルス株式会社
荷役装置
6か月前
株式会社豊田自動織機
荷役車両
11か月前
株式会社豊田自動織機
産業車両
8か月前
ユニパルス株式会社
リフト装置
1か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
5か月前
水戸工業株式会社
吊り具
3か月前
株式会社日本キャリア工業
昇降機
11か月前
ユニパルス株式会社
荷役助力装置
2か月前
ユニパルス株式会社
荷役助力装置
10日前
大栄産業株式会社
クランプ
2か月前
ユニパルス株式会社
荷役助力装置
1か月前
白山工業株式会社
バランサ
4か月前
株式会社キトー
タイヤ用吊具
2か月前
個人
建築部材の吊り上げ装置
9か月前
株式会社ユピテル
システム等
3か月前
株式会社豊田自動織機
フォークリフト
4か月前
新英運輸株式会社
自動車用台車
2か月前
フジテック株式会社
エレベータ
6か月前
株式会社五十鈴製作所
搬送装置
1か月前
株式会社大林組
養生方法
9か月前
白山工業株式会社
腕重量補償機構
9か月前
中坪造園有限会社
吊り荷降ろし具
1か月前
フジテック株式会社
エスカレータ
3か月前
ウエダ産業株式会社
鋼板保持装置
11か月前
株式会社キトー
吊具
10か月前
株式会社タダノ
高所作業車
9か月前
有限会社サエキ
玉掛用器具
7か月前
株式会社スギヤス
車両整備用リフト
7か月前
株式会社スギヤス
車両整備用リフト
7か月前
株式会社大林組
作業システム
9か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ