TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024141808
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023053650
出願日
2023-03-29
発明の名称
腕重量補償機構
出願人
白山工業株式会社
代理人
個人
主分類
B66F
19/00 20060101AFI20241003BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】腕の角度に関わらず、荷重を支えることができる腕重量補償機構を提供すること。
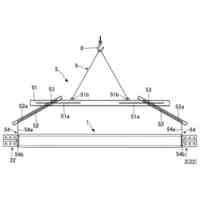
【解決手段】ユーザPの肩部に配置された支点66で回転自在に支持され、一端の吊り下げ点16にユーザPの腕の荷重Wが作用し、他端の補償力作用点72にシリンダ100の牽引力が作用する、直線状のアーム10であって、吊り下げ点16と支点66間の長さと、支点66と補償力作用点72間の長さとの比が一定に保たれるように伸縮可能に構成される、アーム10と;ユーザPに支持されるシリンダ100とを備える、腕重量補償機構1。
【選択図】図3
特許請求の範囲
【請求項1】
ユーザの肩部に配置された支点で回転自在に支持され、一端の吊り下げ点に前記ユーザの腕の荷重が作用し、他端の補償力作用点に荷重支持力が作用する、アームであって、前記吊り下げ点と前記支点間の長さと、前記支点と前記補償力作用点間の長さとの比が一定に保たれるように構成される、アームと;
前記ユーザに支持される荷重出力生成装置とを備える;
腕重量補償機構。
続きを表示(約 920 文字)
【請求項2】
前記アームの軸直交方向を拘束されつつ軸方向に配設され、一端に前記荷重が作用し、前記一端の前記軸方向の変位を比例的に縮小しながら他端側に伝える軸力機構と;
前記アームの前記他端側に配置されるラムダ機構であって、長要素の一端は前記軸力機構に接続され、該長要素の他端は前記支点に支持され、短要素の端部に前記荷重出力生成装置が連結される、ラムダ機構とを備える;
請求項1に記載の腕重量補償機構。
【請求項3】
前記軸力機構は、
前記荷重が連結され、前記軸力機構内をスライドし、内面にラックギア形成されたスライドパイプと;
前記スライドパイプのラックギアと係合して回転する二重歯車の第1ギアと;
前記軸力機構内をスライドするスライド部材であって、前記第1ギアの前記ラックギアと係合する歯車とは異なる歯車と係合する第1ラックギアと、第2ラックギアとが形成された、スライド部材と;
前記スライド部材の第2ラックギアと係合する第2ギアであって、前記軸力機構に形成された固定ラックギアと係合し、前記スライド部材の前記軸力機構内でのスライドによって回転しながら前記アームの軸方向に移動する第2ギアとを備え;
前記ラムダ機構の前記長要素の一端は前記第2ギアに接続される;
請求項2に記載の腕重量補償機構。
【請求項4】
前記軸力機構は、
前記荷重が連結され、前記軸力機構内をスライドし、ワイヤが固定されたスライドパイプと;
前記ワイヤにより片端のプーリが回転する二重プーリ機構であって、中央のプーリが前記アームの軸方向に移動する、二重プーリ機構とを備え;
前記ラムダ機構の前記長要素の一端は前記中央のプーリに接続される;
請求項2に記載の腕重量補償機構。
【請求項5】
前記支点を前記ユーザの肩部に配置するリンクを有し、該リンクは前記荷重出力生成装置と固定連結され、前記シリンダまたは前記リンクをユーザに固定する固定バンドを備える;
請求項3または請求項4に記載の腕重量補償機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、腕重量補償機構に関する。特に、簡単な構造で、腕をどのような位置にしても腕重量を支えることができる腕重量補償機構に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
溶接作業のように腕を空間に止めてゆっくり正確に動かすような作業や、果樹園での果樹収穫作業のように腕を空中に伸ばして長く保持するような作業では腕が疲れやすい。また、グラインダなどの重い工具を取り扱う工場での作業の場合には、工具を保持し続けることで、腕や肩に負担がかかる。このような作業を補助するために、従来から種々な装置が考案されている。従来の装置では、肩の部分に位置する回転部材と腕を支える部材を有し、回転部材のモーメントを相殺するようにして補助する機構が主体であった。
【0003】
例えば特許文献1に開示された装置は、ユーザの身体上で着用されるように構成されるハーネスと、ユーザの腕に力を付与するための腕当てと、ハーネスと腕当てとを回転可能に接続する枢軸と、腕当てに枢軸周りのモーメントを付与する弾性要素と、弾性要素に生ずる弾性力を調整するための機構(ケーブルと二重軌道滑車、ケーブルとカム)を備え、腕の位置に関わらず、腕に作用する荷重を相殺することが意図されている。
【先行技術文献】
【特許文献】
【0004】
特許第6894467号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、このような装置では、腕を真上または真下に伸ばした状態では、腕当てにモーメントを働かす必要がなくなる。この状態では、荷重、すなわち腕で支える荷重と腕自体の重量とは、そのまま腕に軸力として作用することになり、ユーザの腕と肩とで支えることになる。すなわち、腕重量を支える機能は果たしていない。
【0006】
そこで、本発明は、腕の角度に関わらず、荷重を支えることができる腕重量補償機構を提供することを課題とする。
【課題を解決するための手段】
【0007】
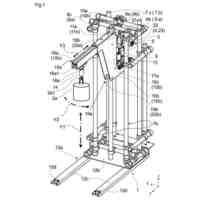
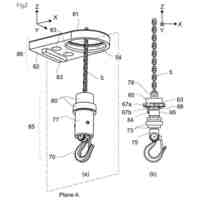
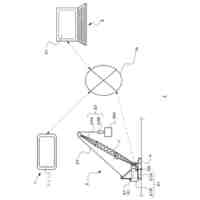
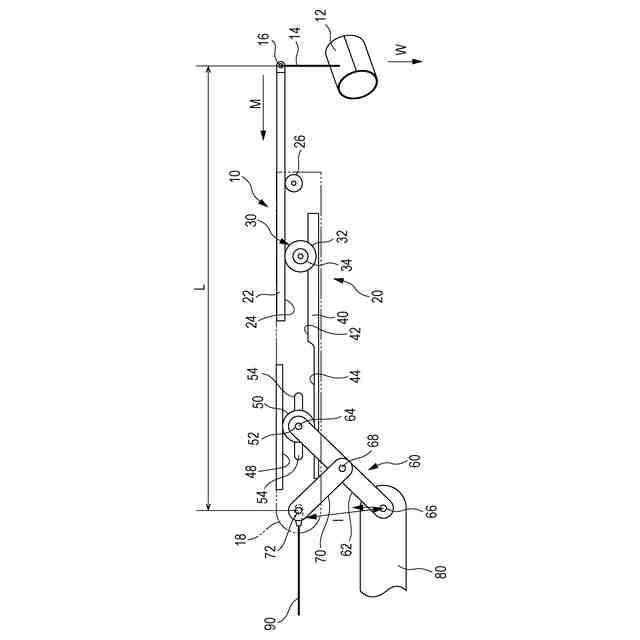
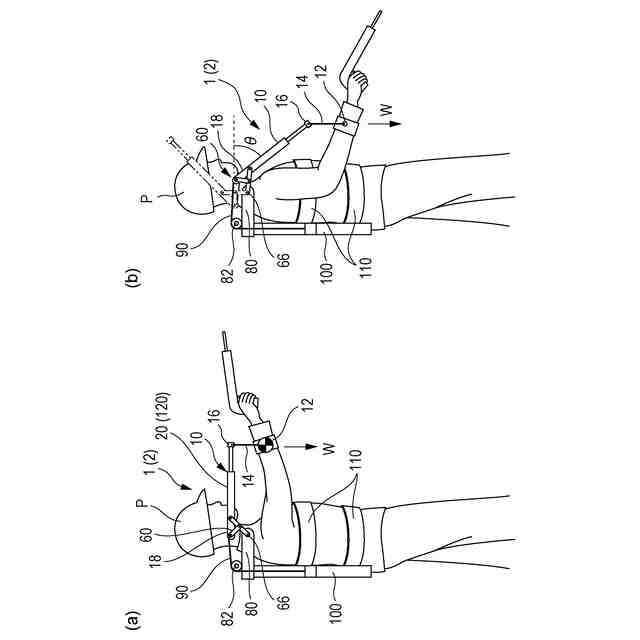
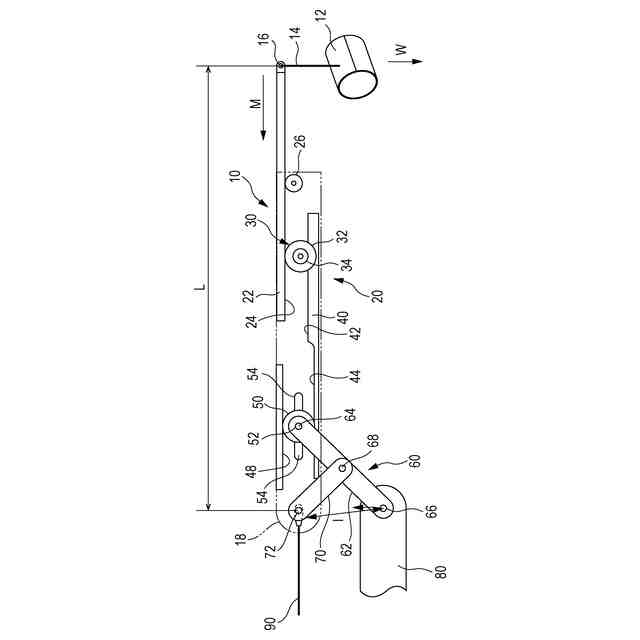
上記課題を解決するために、本発明の第1の態様に係る腕重量補償機構1は、例えば図2および図3に示すように、ユーザPの肩部に配置された支点66で回転自在に支持され、一端の吊り下げ点16にユーザPの腕の荷重Wが作用し、他端の補償力作用点72にシリンダ100の牽引力が作用する、直線状のアーム10であって、吊り下げ点16と支点66間の長さと、支点66と補償力作用点72間の長さとの比が一定に保たれるように伸縮可能に構成される、アーム10と、ユーザPに支持されるシリンダ100とを備える。
【0008】
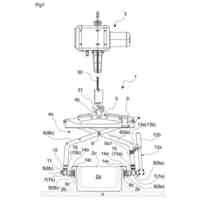
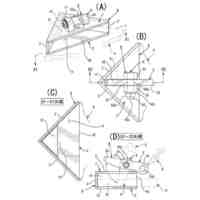
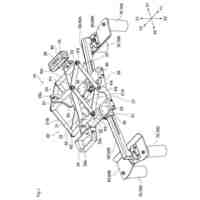
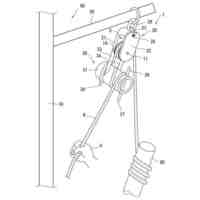
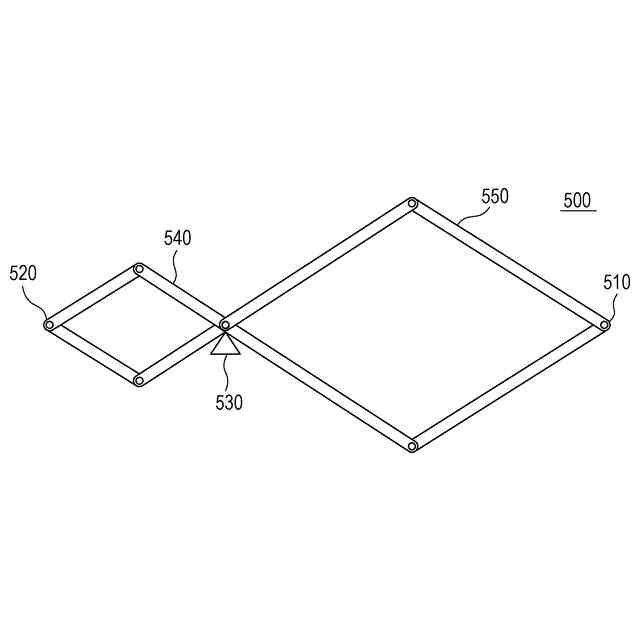
このように構成すると、アームの吊り下げ点に作用する荷重は、長さの比で補償力作用点に作用する牽引力によりバランスする。腕の角度に関わらず、アームが吊り下げ点と支点間の長さと支点と補償力作用点間の長さとの比が一定に保たれるように伸縮するので、すなわち、吊り下げ点の軸方向変位と補償力作用点と支点との間の長さとが比例するように移動するので、アームの先端に作用する荷重も長さの比で補償力作用点に作用する牽引力によりバランスする。よって真上でも真下でも、腕の位置に関わらず荷重を支えることができる、腕重量補償機構となる。本発明の腕重量補償機構において、シリンダ100の牽引力は、荷重支持力とすることができ、シリンダは荷重出力生成装置とすることもできる。このため、本発明の機構において牽引でなく押し出し力を使う構成とすることもできる。また、シリンダ以外の構成としては、その牽引力をハンドルの回転で変えられるようなバネとすることも可能である。さらには、本発明の機構を用いることにより、伸縮型機構ではなく、図1に記載のような折れ曲がるパンタグラフ機構でアームを構成することも可能である。
【0009】
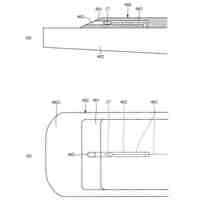
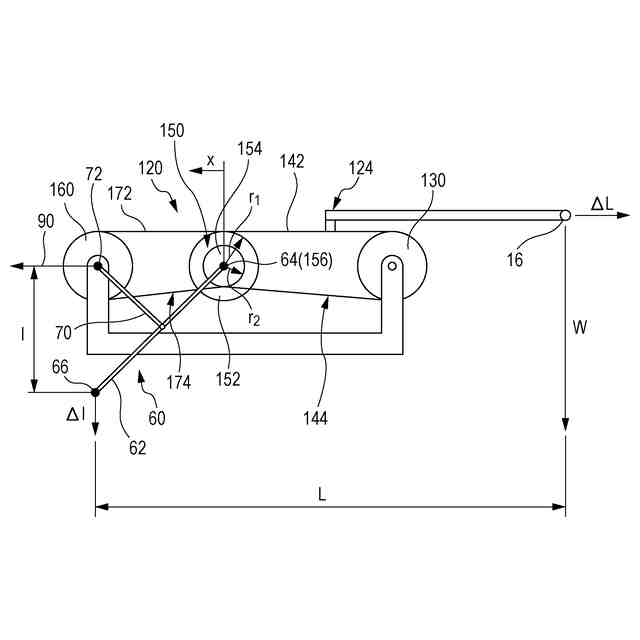
本発明の第2の態様に係る腕重量補償機構1では、例えば図2および図3に示すように、アーム10の軸直交方向を拘束されつつ軸方向に配設され、一端16に荷重Wが作用し、一端16の軸方向の変位を比例的に縮小しながら他端側に伝える軸力機構20と、アーム10の他端18側に配置されるラムダ機構60であって、長要素62の一端64は軸力機構20に接続され、長要素62の他端は支点66に支持され、短要素70の端部72にシリンダ100が連結される、ラムダ機構60とを備える。
【0010】
このように構成すると、アームの一端に荷重が作用し他端側がラムダ機構により回転可能に支持されてシリンダの牽引力を受け、さらに、軸力機構により一端の軸方向変位が比例的に縮小されて他端側のシリンダによる牽引変位に変換される。このアーム先端の変位量とシリンダによる牽引変位の比例関係はアームが水平な姿勢から角度θだけ傾いた時にも成り立つので、アームの一端に働く荷重はシリンダが生成する補償力によってアームの角度θに関わらず常に補償される。そしてこの補償力はアームの軸直交方向の荷重だけでなく軸方向の荷重も相殺する効果を生成し、その効果はアームの姿勢θが±90度までの、腕が真下あるいは真上にした姿勢であっても生成される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
1か月前
個人
懸吊装置
12か月前
ユニパルス株式会社
吊具
3か月前
個人
海上コンテナ昇降装置
8か月前
ユニパルス株式会社
荷役装置
8か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社いうら
車椅子用昇降機
1か月前
株式会社豊田自動織機
産業車両
9か月前
ユニパルス株式会社
リフト装置
3か月前
水戸工業株式会社
吊り具
5か月前
株式会社豊田自動織機
荷役車両
7か月前
ユニパルス株式会社
荷役助力装置
4か月前
愛知製鋼株式会社
受け架台
15日前
ユニパルス株式会社
荷役助力装置
1か月前
ユニパルス株式会社
荷役助力装置
3か月前
株式会社大林組
安全支援システム
8日前
株式会社伊藤
滑り止め装置
1か月前
白山工業株式会社
バランサ
5か月前
大栄産業株式会社
クランプ
3か月前
株式会社ユピテル
システム等
4か月前
個人
建築部材の吊り上げ装置
10か月前
株式会社キトー
タイヤ用吊具
4か月前
株式会社五十鈴製作所
搬送装置
3か月前
株式会社大林組
養生方法
11か月前
フジテック株式会社
エレベータ
7か月前
大和ハウス工業株式会社
吊上具
24日前
株式会社豊田自動織機
フォークリフト
6か月前
新英運輸株式会社
自動車用台車
4か月前
株式会社キトー
吊具
11か月前
株式会社タダノ
高所作業車
11か月前
白山工業株式会社
腕重量補償機構
11か月前
有限会社サエキ
玉掛用器具
8か月前
中坪造園有限会社
吊り荷降ろし具
3か月前
フジテック株式会社
エスカレータ
5か月前
大和ハウス工業株式会社
パネル吊具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ