TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099378
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216011
出願日
2023-12-21
発明の名称
侵入監視システム
出願人
株式会社タダノ
代理人
個人
,
個人
主分類
B66C
13/00 20060101AFI20250626BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】監視対象領域内に配置されている作業機の状態に基づいて前記監視対象領域内において物体の侵入の判定に用いられる点群を算出することによりシステムの信頼性を向上させた侵入監視システムを提供する。
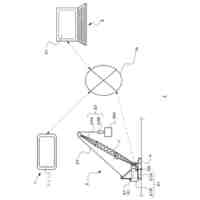
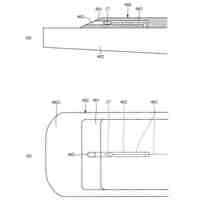
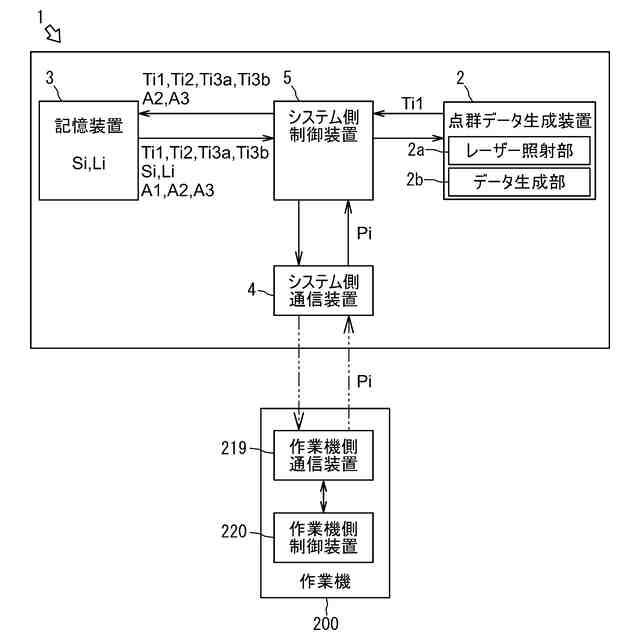
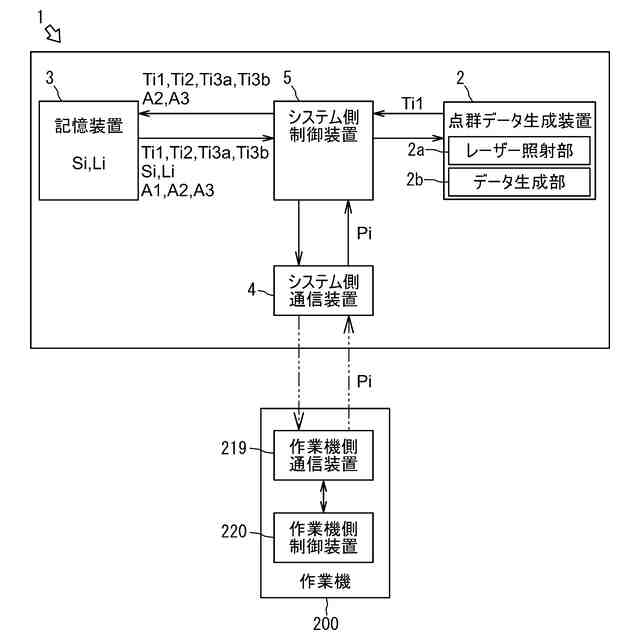
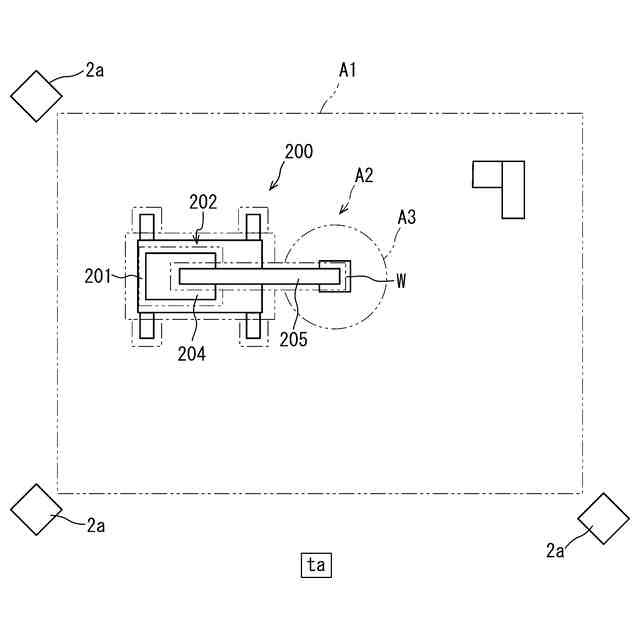
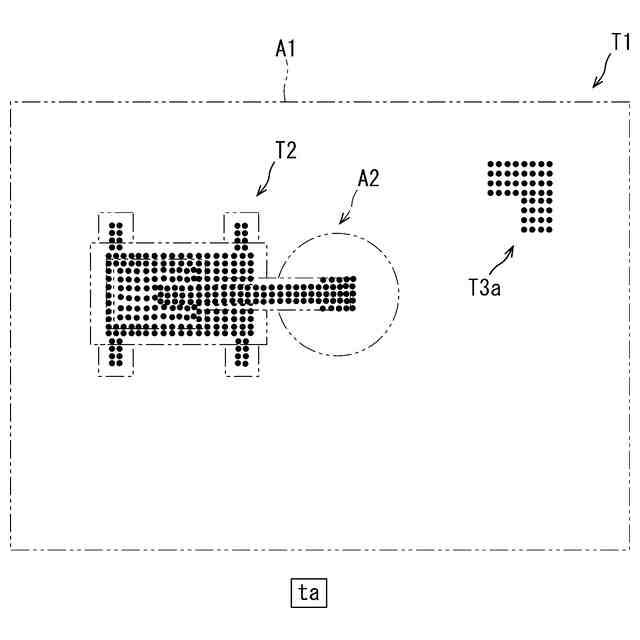
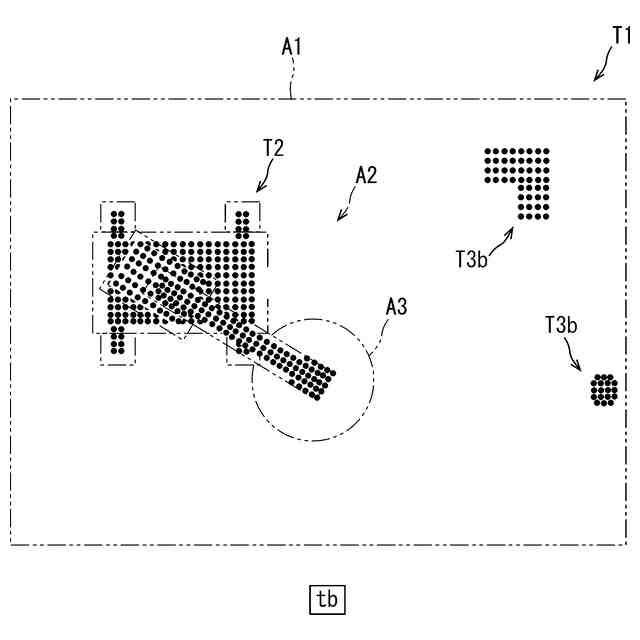
【解決手段】侵入監視システム1の制御装置5は、位置姿勢データPi及び点群データTi1を取得すると、作業機200が占有する3次元領域に沿うように規定される作業機領域A2と、点群データTi1に基づいた監視対象領域A1及び作業機領域A2の点群の位置と、を単位時間毎に算出する。作業機領A2域内に位置する点群を、作業機200を示す作業機点群T2と判定し、監視対象領域A1内の点群のうち作業機領域A2外に位置する点群である侵入判定対象点群T3によって監視対象領域A1内に侵入した物体の有無を判定する。
【選択図】図1
特許請求の範囲
【請求項1】
所定の3次元領域である監視対象領域内の物体の位置を示す点群データを単位時間毎に生成する点群データ生成装置と、
前記点群データ生成装置から前記点群データを前記単位時間毎に記憶する記憶装置と、
前記記憶装置が記憶した複数の前記点群データを比較することにより、前記監視対象領域内に前記物体が侵入したか否かを判定する制御装置と、を有する侵入監視システムであって、
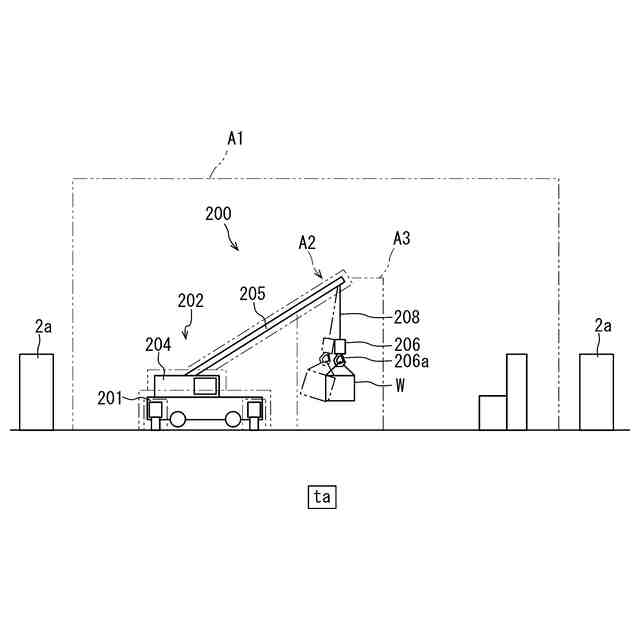
旋回可能な旋回台及び前記旋回台に支持される起伏及び伸縮可能なブームを有する作業機が前記監視対象領域内に位置する状態において、
前記作業機の位置及び姿勢に関連するデータである位置姿勢データを前記単位時間毎に取得する通信装置を有し、
前記記憶装置は、
前記作業機の各部の形状に関連するデータであるパーツ形状データを記憶し、
前記制御装置は、
前記通信装置が前記位置姿勢データ及び前記点群データを取得すると、取得した前記位置姿勢データ及び前記パーツ形状データに基づいて前記作業機が占有する3次元領域に沿うように規定される作業機領域と、前記点群データに基づいた前記監視対象領域及び前記作業機領域の点群の位置と、を単位時間毎に算出し、
前記作業機領域内に位置する点群を、前記作業機を示す作業機点群と判定し、前記監視対象領域内の点群のうち前記作業機領域外に位置する点群である侵入判定対象点群によって前記監視対象領域内に侵入した物体の有無を判定する、
侵入監視システム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の侵入監視システムにおいて、
前記制御装置は、
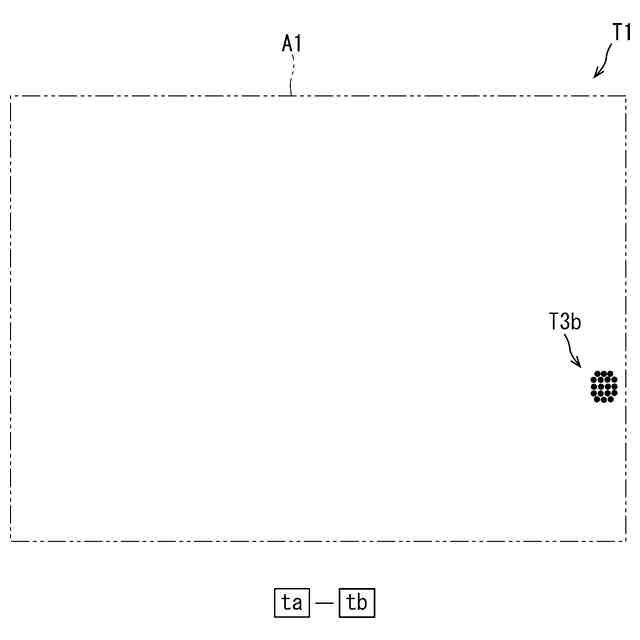
任意の第1経過時間において取得した点群データに基づいて算出した第1の前記侵入判定対象点群と、前記第1経過時間から前記単位時間だけ経過した第2経過時間において取得した点群データに基づいて算出した第2の前記侵入判定対象点群との差から、前記単位時間の間に前記監視対象領域内に侵入した物体の有無を判定する、
侵入監視システム。
【請求項3】
請求項1または2に記載の侵入監視システムにおいて、
前記制御装置は、
前記作業機領域のうち前記作業機の移動する部分に対応する作業機移動領域における前記作業機点群の点の数である移動点群点数を算出し、
前記移動点群点数が所定値範囲外である場合、前記作業機または前記点群データ生成装置の少なくとも一方の点検が必要であると判定する、
侵入監視システム。
【請求項4】
請求項3に記載の侵入監視システムにおいて、
前記制御装置は、
前記作業機領域のうち前記作業機の移動しない部分に対応する作業機固定領域において前記作業機点群の点の数である固定点群点数を算出し、
前記固定点群点数が所定値範囲外である場合、前記点群データ生成装置の点検が必要であると判定し、
前記固定点群点数が所定値範囲内である場合、前記作業機の点検が必要であると判定する、
侵入監視システム。
【請求項5】
請求項3に記載の侵入監視システムにおいて、
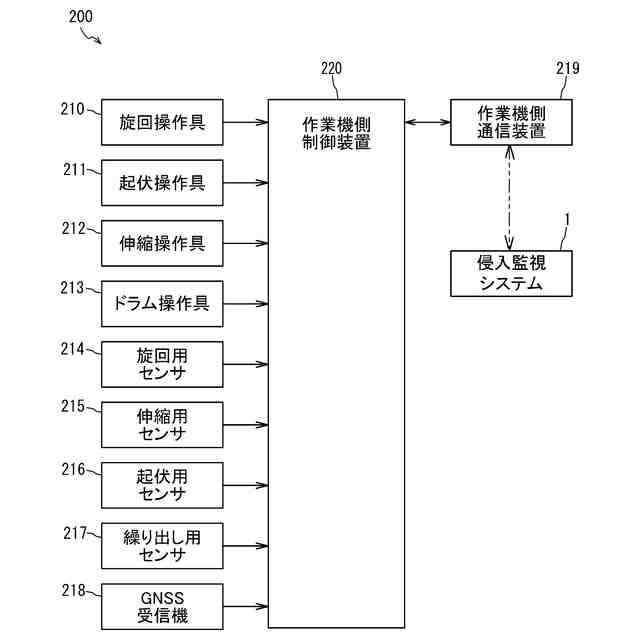
前記通信装置は、
前記作業機の操作に関連する操作データを前記単位時間毎に取得可能に構成され、
前記制御装置は、
前記通信装置が前記操作データを取得していない状態において、単位時間毎に前記作業機点群によって示される前記作業機の位置が変化している場合、前記作業機の点検が必要であると判定する、
侵入監視システム。
【請求項6】
請求項1または2に記載の侵入監視システムにおいて、
前記制御装置は、
前記位置姿勢データ及び前記パーツ形状データに基づいて、前記作業機が占有する3次元領域の境界面から垂直な方向に所定量だけ離れた位置を境界とする前記作業機領域を算出する、
侵入監視システム。
【請求項7】
請求項4に記載の侵入監視システムにおいて、
前記制御装置は、
前記監視対象領域内に侵入した物体があると判定した場合、前記作業機の点検が必要であると判定した場合、または前記点群データ生成装置の点検が必要であると判定した場合、前記作業機の動作を停止する制御を行う、
侵入監視システム。
【請求項8】
請求項1または請求項2に記載の侵入監視システムにおいて、
前記作業機は、
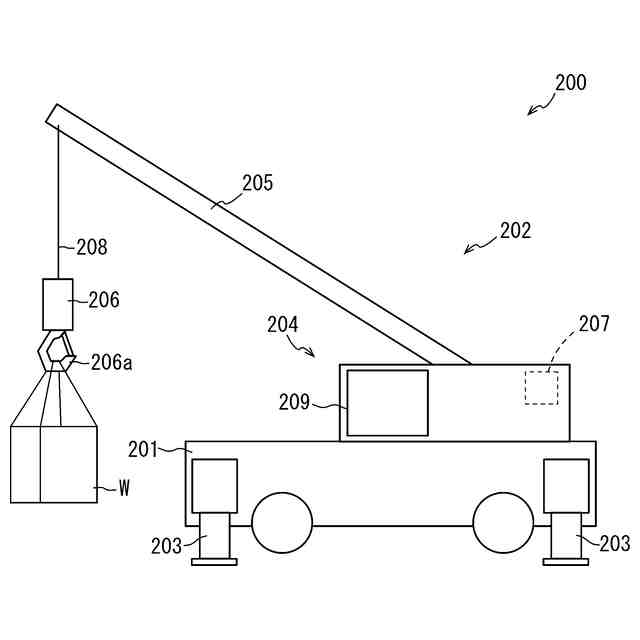
前記ブームから吊り荷が吊り下げられるクレーンであって、
通信装置は、
前記吊り荷の形状に関連するデータである吊り荷形状データを取得可能に構成され、
前記制御装置は、
前記位置姿勢データ及び前記吊り荷形状データに基づいて、前記ブームの先端部分から下方に延びる前記吊り荷を含む領域を前記作業機領域に含める、
侵入監視システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、侵入監視システムに関連する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来から、クレーン等の作業機が動作する領域を含む作業機領域を監視し、前記作業機領域内への物体の侵入を検出する侵入監視システムがある。例えば、特許文献1には、物体の侵入を監視する監視エリアを設定する監視エリア設定システムが開示されている。
【0003】
特許文献1に記載の監視エリア設定システムは、前記作業機の周囲に監視エリアを設定する監視エリア設定手段と、前記監視エリアのうち、前記作業機の動作範囲のエリアを除外エリアとし、前記監視エリアから前記除外エリアを除外する除外手段と、基準位置から前記監視エリア内に位置する物体までの距離を示す点群データを取得するLiDAR(点群データ取得部)とを有する。
【0004】
特許文献1に記載の監視エリア設定システムは、前記LiDARによって取得された前記点群データのうち、作業機の位置を示す点群データを累積することにより、作業機の一部が移動する可能性がある作業機の動作範囲を除外エリアとして算出する。前記監視エリア設定システムは、前記除外エリアを除外した後の前記監視エリア内の点群データに基づいて、前記監視エリア内への物体の侵入を検出している。
【先行技術文献】
【特許文献】
【0005】
特開2023-074040号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の監視エリア設定システムでは、前記作業機が移動する可能性がある範囲を前記除外エリアとして設定している。よって、前記除外エリアは、前記監視エリア内おいて、外部から物体が侵入可能な大きさを有している。また、前記監視エリア設定システムは、前記監視エリアに含まれる前記除外エリア内の点群を前記物体の侵入の判定に用いられる点群から除外する。つまり、前記監視エリア設定システムは、前記除外エリア内において作動している作業機の位置を示す点群と前記除外エリア内に侵入した物体の位置を示す点群とを区別することなく前記監視エリア内への物体の侵入の判定に用いられる点群から除外する。よって、前記監視エリア設定システムは、前記作業機の動作範囲が大きくなるほど設定した前記監視エリアにおける実質的な監視対象範囲が狭くなり、システムの信頼性が低下する問題があった。
【0007】
本発明の目的は、監視対象領域内に配置されている作業機の状態に基づいて前記監視対象領域内において物体の侵入の判定に用いられる点群を算出することによりシステムの信頼性を向上させた侵入監視システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0009】
即ち、本発明の一実施形態に係る侵入監視システムは、所定の3次元領域である監視対象領域内の物体の位置を示す点群データを単位時間毎に生成する点群データ生成装置と、前記点群データ生成装置から前記点群データを前記単位時間毎に記憶する記憶装置と、前記記憶装置が記憶した複数の前記点群データを比較することにより、前記監視対象領域内に前記物体が侵入したか否かを判定する制御装置と、を有する侵入監視システムである。前記侵入監視システムは、旋回可能な旋回台及び前記旋回台に支持される起伏及び伸縮可能なブームを有する作業機が前記監視対象領域内に位置する状態において、前記作業機の位置及び姿勢に関連するデータである位置姿勢データ、及び前記作業機の動作に関連するデータである動作データを前記単位時間毎に取得する通信装置を有する。前記記憶装置は、前記作業機の各部の形状に関連するデータであるパーツ形状データを記憶する。前記制御装置は、前記通信装置が前記位置姿勢データ及び前記点群データを取得すると、取得した前記位置姿勢データ及び前記パーツ形状データに基づいて前記作業機が占有する3次元領域に沿うように規定される作業機領域と、前記点群データに基づいた前記監視対象領域及び前記作業機領域の点群の位置と、を単位時間毎に算出する。更に、前記制御装置は、前記作業機領域内に位置する点群を、前記作業機を示す作業機点群と判定し、前記監視対象領域内の点群のうち前記作業機領域外に位置する点群である侵入判定対象点群によって前記監視対象領域内に侵入した物体の有無を判定する。
【0010】
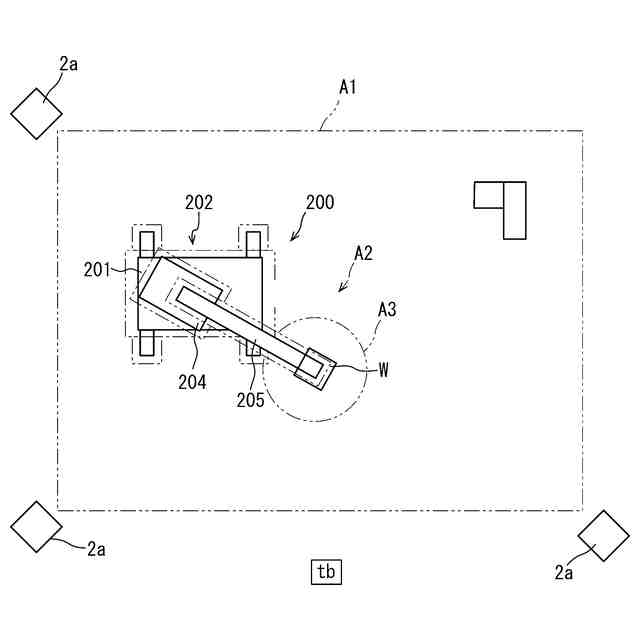
前述の構成では、侵入監視システムの制御装置は、監視対象領域内に位置する作業機の形状、単位時間毎の姿勢に基づいて、前記作業機が占有する領域である作業機領域を算出している。つまり、前記制御装置は、単位時間毎に前記作業機が占有する空間に沿った領域を前記作業機領域として算出している。前記制御装置は、算出した前記作業機領域内に位置する点群を前記作業機点群として判定するので、前記監視対象領域内において前記作業機の動作範囲内に侵入した物体を検出することができる。また、前記作業機領域は、単位時間毎の前記作業機が占有する領域に沿うように算出されている。そのため、前記制御装置は、前記作業機の動作範囲が変化しても前記監視対象領域の点群から前記作業機の位置を示す点群だけを前記作業機点群として判定する。このように、前記監視対象領域内に配置されている前記作業機の状態に基づいて前記監視対象領域内において物体の侵入の判定に用いられる点群を算出することにより侵入監視システムの信頼性を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
3か月前
個人
転落防止階段
1日前
ユニパルス株式会社
吊具
4か月前
個人
海上コンテナ昇降装置
10か月前
ユニパルス株式会社
吊具装置
11か月前
ユニパルス株式会社
荷役装置
9か月前
水戸工業株式会社
吊り具
6か月前
ユニパルス株式会社
リフト装置
5か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社いうら
車椅子用昇降機
3か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
産業車両
11か月前
ユニパルス株式会社
荷役助力装置
4か月前
ユニパルス株式会社
荷役助力装置
3か月前
大栄産業株式会社
クランプ
5か月前
株式会社大林組
安全支援システム
2か月前
株式会社伊藤
滑り止め装置
2か月前
岐阜工業株式会社
運搬台車
2日前
個人
垂直自動搬送機
1か月前
個人
エアバック式レスキュー用品
24日前
愛知製鋼株式会社
受け架台
2か月前
ユニパルス株式会社
荷役助力装置
6か月前
白山工業株式会社
バランサ
7か月前
株式会社ユピテル
システム等
6か月前
株式会社キトー
タイヤ用吊具
6か月前
株式会社豊田自動織機
フォークリフト
1か月前
フジテック株式会社
エレベータ
9か月前
新英運輸株式会社
自動車用台車
6か月前
大和ハウス工業株式会社
吊上具
2か月前
株式会社五十鈴製作所
搬送装置
5か月前
株式会社豊田自動織機
フォークリフト
8か月前
中国計量大学
電子安全クランプ
1か月前
有限会社サエキ
玉掛用器具
10か月前
中坪造園有限会社
吊り荷降ろし具
5か月前
フジテック株式会社
エスカレータ
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ