TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099824
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216773
出願日
2023-12-22
発明の名称
クレーン
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B66C
13/22 20060101AFI20250626BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】旋回により生じる吊荷の振れを、効率よく抑制できるクレーンを提供する。
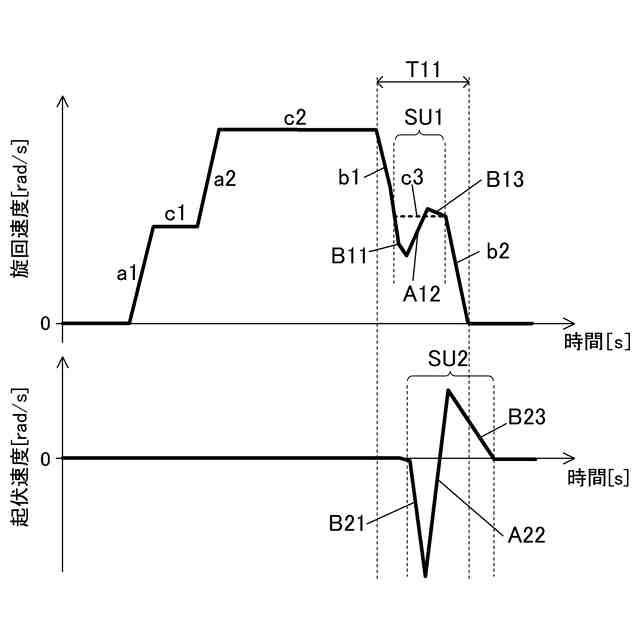
【解決手段】上部旋回体と、上部旋回体に対して起伏可能なブームを備えたクレーンである。そして、上部旋回体が旋回して吊荷を移動させる際に、自動でブームの起伏角度を増加及び減少させて(SU2)吊荷を制振する。また、制振モードのときに、ブームの起伏角度を増加及び減少させて吊荷を制振する。
【選択図】図6
特許請求の範囲
【請求項1】
上部旋回体と、
前記上部旋回体に対して起伏可能なブームを備えたクレーンであって、
前記上部旋回体が旋回して吊荷を移動させる際に、自動で前記ブームの起伏角度を増加及び減少させて吊荷を制振する、
クレーン。
続きを表示(約 800 文字)
【請求項2】
前記上部旋回体が旋回して吊荷を移動させる自動運転の際に、自動で前記ブームの起伏角度を増加及び減少させて吊荷を制振する、
請求項1記載のクレーン。
【請求項3】
前記自動運転には吊荷の移動半径を変えるための起伏運転が含まれ、
制振のための起伏角度の増加は、前記起伏運転に含まれる起伏角度の増加よりも増加率が大きい、或いは、制振のための起伏角度の減少は、前記起伏運転に含まれる起伏角度の減少よりも減少率が大きい、
請求項2記載のクレーン。
【請求項4】
制振のための起伏角度の増加及び減少の時間が、前記吊荷の振れが一往復する時間である振れ周期より短い、
請求項1から請求項3のいずれか一項に記載のクレーン。
【請求項5】
制振のための起伏角度の増加量と減少量とが等しい、
請求項1から請求項3のいずれか一項に記載のクレーン。
【請求項6】
前記上部旋回体の減速旋回中、旋回停止後又はこれら両方の間に、制振のための起伏角度の増加と減少とが行われる、
請求項1から請求項3のいずれか一項に記載のクレーン。
【請求項7】
制振を行わない通常モードと、制振を行う制振モードがあり、
制振モードのときに、前記ブームの起伏角度を増加及び減少させて吊荷を制振する、
請求項1記載のクレーン。
【請求項8】
吊荷の振れを検出する検出装置と、
前記検出装置の検出情報に基づき前記制振モードへ移行又は移行の支援を行う制御部と、
を備える請求項7記載のクレーン。
【請求項9】
前記上部旋回体の旋回の停止又は旋回の減速に基づいて前記制振モードへ移行又は移行の支援を行う制御部を備える請求項7又は請求項8に記載のクレーン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、クレーンに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、クレーンの旋回時に生じた吊荷の振れ(振り子運動)を止める制振制御について記載されている。当該制振制御においては、ブームの旋回時にブーム吊り点半径を減少すると同時に吊荷を吊ったワイヤーロープを繰り出して吊荷の振れを止めている。
【先行技術文献】
【特許文献】
【0003】
特許4167885号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の制振制御のように、ワイヤーロープを繰り出しのみで制振させようとすると、ワイヤーロープの繰り出し速度が遅いため、振れ止めに必要な速度を担保できないという課題がある。
【0005】
本発明は、旋回により生じる吊荷の振れを、効率よく抑制できるクレーンを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る一つのクレーンは、
上部旋回体と、
前記上部旋回体に対して起伏可能なブームを備えたクレーンであって、
前記上部旋回体が旋回して吊荷を移動させる際に、自動で前記ブームの起伏角度を増加及び減少させて吊荷を制振する。
【発明の効果】
【0007】
本発明によれば、旋回により生じる吊荷の振れを、効率よく抑制できるという効果が得られる。
【図面の簡単な説明】
【0008】
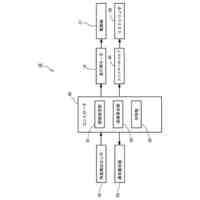
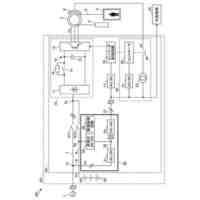
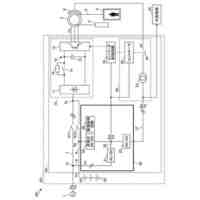
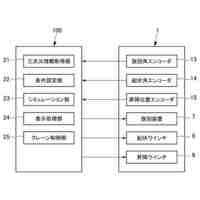
本実施形態のクレーンを示すブロック図である。
モード切替制御部が実行するモード切替処理を示すフローチャートである。
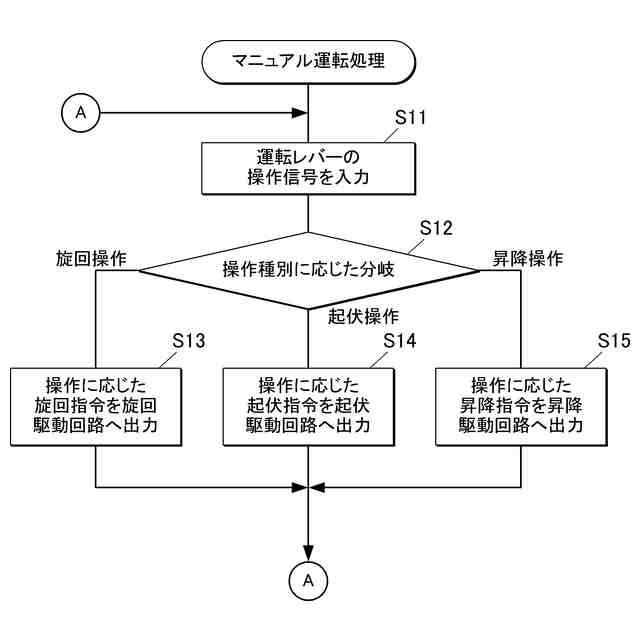
マニュアル運転制御部が実行するマニュアル運転処理を示すフローチャートである。
自動運転制御部が実行する自動運転処理を示すフローチャートである。
制振モード運転制御部が実行する制振運転処理を示すフローチャートである。
実施形態の自動運転例1を説明するタイムチャートである。
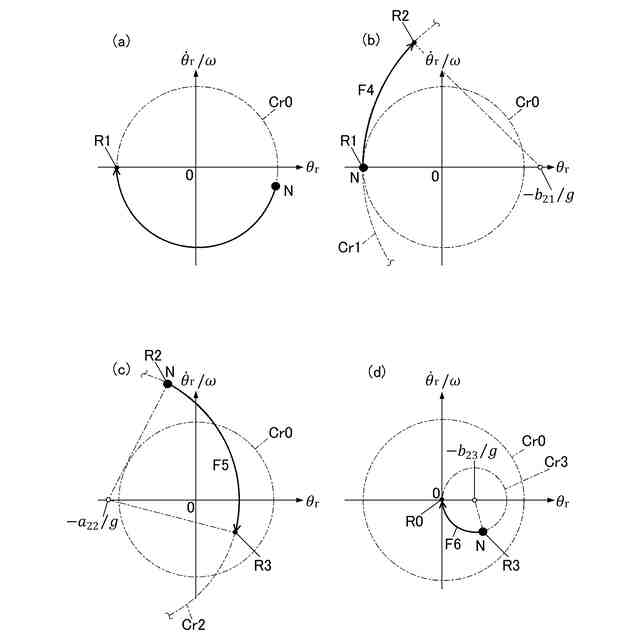
旋回方向の制振の原理を説明する第1段階(a)から第4段階(d)の位相面軌跡図である。
直交方向の制振の原理を説明する第1段階(a)から第4段階(d)の位相面軌跡図である。
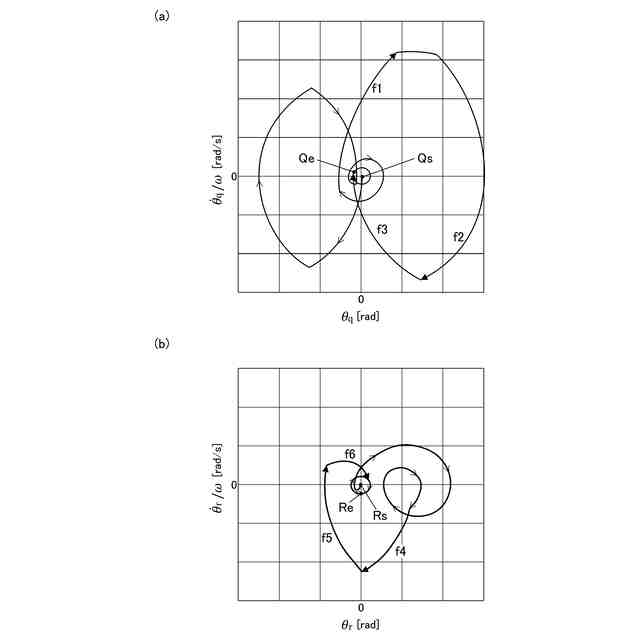
自動運転例1のシミュレーション結果を示す旋回方向の位相面軌跡図(a)及び直交方向の位相面軌跡図(b)である。
制振を行わなかった場合の旋回方向合の位相面軌跡図(a)及び直交方向の位相面軌跡図(b)である。
実施形態の自動運転例2を説明するタイムチャートである。
実施形態の自動運転例3を説明するタイムチャートである。
制振モードの運転例を示すタイムチャートである。
制振モードのシミュレーション結果を示す、旋回方向qの位相面軌跡図(a)、直交方向rの位相面軌跡図(b)、並びに、吊荷の軌跡図(c)である。
【発明を実施するための形態】
【0009】
以下、本発明の各実施形態について図面を参照して詳細に説明する。
【0010】
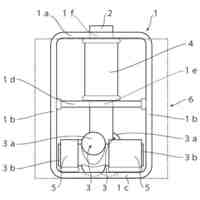
図1は、本実施形態のクレーンを示すブロック図である。本実施形態のクレーン1は、下部構造体11と、下部構造体11に対して旋回駆動する上部旋回体12と、上部旋回体12に対して起伏するブーム(起伏部材)13と、ブーム13からワイヤーロープLを介して吊り下げられたフック14と、吊荷Hの振れを検出するカメラなどの検出装置16と、オペレータにより操作可能な運転操作部20と、オペレータへ情報を出力及びオペレータから情報を入力する入出力部30と、クレーン1の運転制御を行う制御部40と、を備える。検出装置16は、I/O64を介して制御部40へ吊荷Hの振れの検出情報(映像データ等)を送る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
転落防止階段
28日前
個人
小型クレーン
22日前
株式会社豊田自動織機
産業車両
2か月前
個人
垂直自動搬送機
2か月前
個人
エアバック式レスキュー用品
1か月前
株式会社大林組
安全支援システム
3か月前
岐阜工業株式会社
運搬台車
29日前
個人
アウトリガー用転倒防止ベース
21日前
株式会社豊田自動織機
フォークリフト
2か月前
中国計量大学
電子安全クランプ
1か月前
株式会社キトー
コンテナ吊り具
1日前
フジテック株式会社
乗客コンベア
20日前
山崎産業株式会社
手摺り拭用器具
2か月前
株式会社タダノ
クレーン装置
8日前
株式会社タダノ
3段ブーム伸縮機構
8日前
株式会社スギヤス
車両整備用リフト
1か月前
フジテック株式会社
エレベータ
1か月前
神鋼物流株式会社
吊具
15日前
ライセン株式会社
飛行体用ウインチ吊フック
今日
CKD株式会社
アーム型助力装置
15日前
イワフジ工業株式会社
架線集材システム
1か月前
イワフジ工業株式会社
架線集材システム
1か月前
フジテック株式会社
マンコンベヤ
1か月前
フジテック株式会社
フック掛け器具
22日前
日本リフト株式会社
移動式昇降台装置
7日前
富士電機株式会社
エレベータ制御装置
1か月前
富士電機株式会社
エレベータ制御装置
1か月前
株式会社豊田自動織機
監視装置
1か月前
フジテック株式会社
エレベータ
2か月前
富士電機株式会社
エレベータ制御装置
2か月前
株式会社日立産機システム
クレーン
1か月前
中国計量大学
制振型ガイドレール固定システム
2か月前
有限会社三兄
フォークリフト用アタッチメント
1か月前
株式会社大林組
クレーンの自動運転装置
1か月前
フジテック株式会社
乗客コンベア
2か月前
フジテック株式会社
乗客コンベア
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ