TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025144892
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044803
出願日
2024-03-21
発明の名称
クレーンの自動運転装置
出願人
株式会社大林組
代理人
個人
,
個人
主分類
B66C
13/48 20060101AFI20250926BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】クレーンの自動運転のための制御パラメータの精度を高めることが可能なクレーンの自動運転装置を提供する。
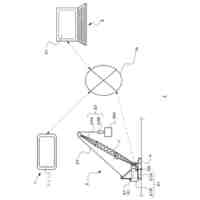
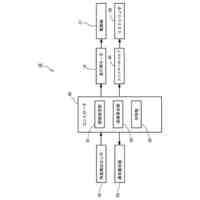
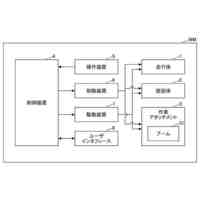
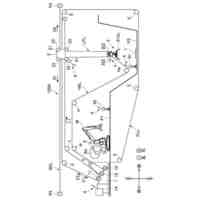
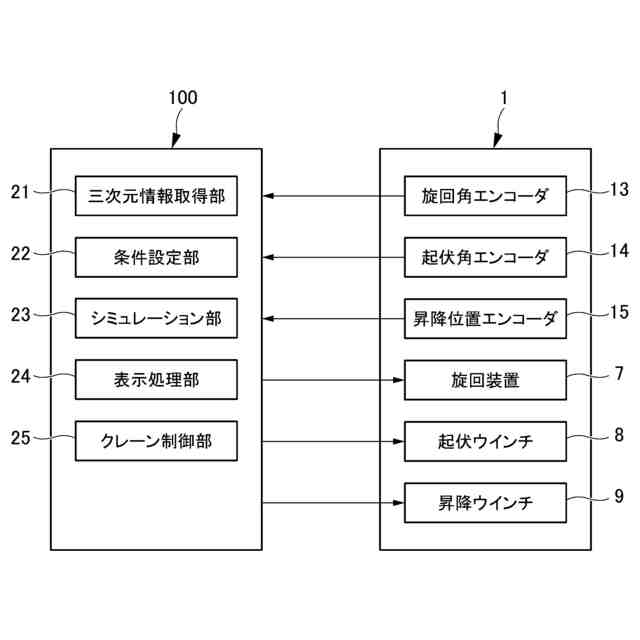
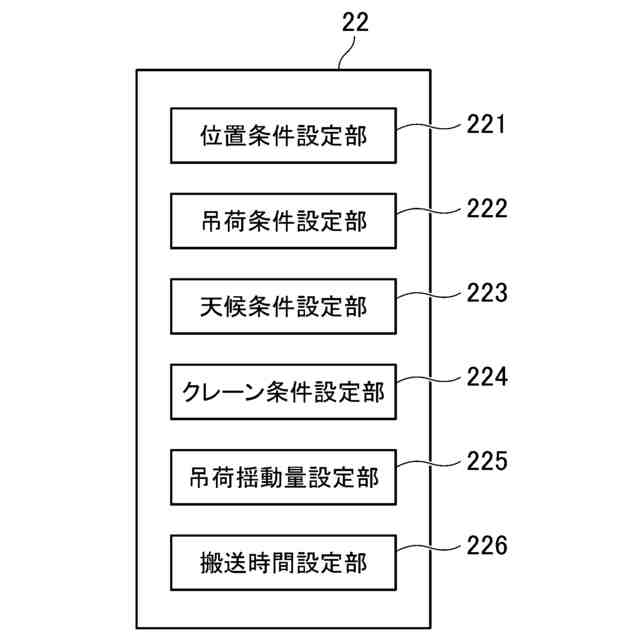
【解決手段】本開示は、クレーン1の自動運転装置100であって、移動始点位置及び移動終点位置を設定する位置条件設定部と、吊荷条件を設定する吊荷条件設定部と、天候条件を設定する天候条件設定部と、クレーン条件を設定するクレーン条件設定部と、吊荷揺動量設定部と、搬送時間設定部と、クレーン1の吊荷支持部の移動のシミュレーションを行い、吊荷支持部の経路を作成し、クレーン1の駆動装置を自動制御するための制御パラメータを算出するシミュレーション部23と、シミュレーション部23が作成した経路と、シミュレーション部23が算出した制御パラメータとに基づいてクレーン1の駆動装置を自動制御してクレーン1の吊荷支持部を移動させるクレーン制御部25と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
クレーンの駆動装置を自動制御して、吊荷を支持可能な前記クレーンの吊荷支持部を移動させるクレーンの自動運転装置であって、
前記吊荷の移動始点位置及び移動終点位置を設定する位置条件設定手段と、
前記吊荷の大きさ及び吊荷重量を含む吊荷条件を設定する吊荷条件設定手段と、
風向き及び風速を含む天候条件を設定する天候条件設定手段と、
前記クレーンの撓み情報を含むクレーン条件を設定するクレーン条件設定手段と、
前記吊荷の揺動の最大許容量を設定する吊荷揺動量設定手段と、
前記移動始点位置から前記移動終点位置までの前記吊荷の搬送時間の最大許容量を設定する搬送時間設定手段と、
前記移動始点位置及び前記移動終点位置と、前記吊荷条件と、前記天候条件と、前記クレーン条件と、前記吊荷の揺動の最大許容量と、前記搬送時間の最大許容量とに基づいて、前記クレーンの前記吊荷支持部の移動のシミュレーションを行い、前記吊荷支持部の経路を作成し、前記クレーンの前記駆動装置を自動制御するための制御パラメータを算出するシミュレーション手段と、
前記シミュレーション手段が作成した前記経路と、前記シミュレーション手段が算出した前記制御パラメータとに基づいて前記クレーンの前記駆動装置を自動制御して前記クレーンの前記吊荷支持部を移動させるクレーン制御手段と、を備える
ことを特徴とするクレーンの自動運転装置。
続きを表示(約 400 文字)
【請求項2】
表示部と、
前記シミュレーション手段が行った前記吊荷支持部の移動の前記シミュレーションの結果を前記表示部に表示させる表示処理手段と、を備え、
前記シミュレーション手段は、三次元モデルを利用して前記シミュレーションを行い、
前記表示処理手段は、前記三次元モデル及び前記吊荷支持部の移動軌跡を前記表示部に表示させる
ことを特徴とする請求項1に記載のクレーンの自動運転装置。
【請求項3】
前記シミュレーション手段は、前記搬送時間が最短となる前記制御パラメータを算出する
ことを特徴とする請求項1又は請求項2に記載のクレーンの自動運転装置。
【請求項4】
前記シミュレーション手段は、前記吊荷の揺動量が最小となる前記制御パラメータを算出する
ことを特徴とする請求項1又は請求項2に記載のクレーンの自動運転装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、クレーンの自動運転装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
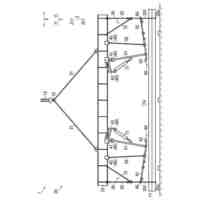
特許文献1には、タワークレーンの自動運転システムが開示されている。この自動運転システムでは、建造物の設計図と移送時間を演算する座標とを用いて、タワークレーンのジブ先端の位置と、建築部材(吊り荷)の設置位置とを座標上で読み込み、両者の位置関係(距離)を算出して、巻上・巻下か、ジブの起・伏か、回転体の右旋回・左旋回かを判別すると同時に、それに要する時間も算出して移動速度を決定し、自動運転開始信号を出力する。
【先行技術文献】
【特許文献】
【0003】
特開2019-112178号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載のようなタワークレーンの自動運転においては、クレーン操作量を制御する制御パラメータの設定は、安全性や精度に影響するので重要である。
【0005】
クレーンの自動運転のための制御パラメータを決定するときは、実際にクレーンを用いて荷ぶれ(吊荷の揺動)やオーバーラップをできるだけ抑えるような範囲でクレーン操作量を調整し、その際の制御パラメータをもとに算出することが考えられる。
【0006】
しかし、吊荷の重量には多くのパターンが存在し、それぞれに対し巻上下・旋回・起伏など様々な動作の制御パラメータを調整する必要があるため、手間が掛かる。また、建設現場の風速などの外的要因によって、制御パラメータの精度が低下する可能性がある。一方で、荷ぶれやオーバーラップの度合いが分からない状態で、実際に吊荷の揚重を行うと、吊荷が周囲に衝突するおそれがあり、安全性を確保することが難しい。
【0007】
そこで、本開示は、クレーンの自動運転のための制御パラメータの精度を高めることが可能なクレーンの自動運転装置の提供を目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の第1の態様は、クレーンの駆動装置を自動制御して、吊荷を支持可能な前記クレーンの吊荷支持部を移動させるクレーンの自動運転装置であって、前記吊荷の移動始点位置及び移動終点位置を設定する位置条件設定手段と、前記吊荷の大きさ及び吊荷重量を含む吊荷条件を設定する吊荷条件設定手段と、風向き及び風速を含む天候条件を設定する天候条件設定手段と、前記クレーンの撓み情報を含むクレーン条件を設定するクレーン条件設定手段と、前記吊荷の揺動の最大許容量を設定する吊荷揺動量設定手段と、前記移動始点位置から前記移動終点位置までの前記吊荷の搬送時間の最大許容量を設定する搬送時間設定手段と、前記移動始点位置及び前記移動終点位置と、前記吊荷条件と、前記天候条件と、前記クレーン条件と、前記吊荷の揺動の最大許容量と、前記搬送時間の最大許容量とに基づいて、前記クレーンの前記吊荷支持部の移動のシミュレーションを行い、前記吊荷支持部の経路を作成し、前記クレーンの前記駆動装置を自動制御するための制御パラメータを算出するシミュレーション手段と、前記シミュレーション手段が作成した前記経路と、前記シミュレーション手段が算出した前記制御パラメータとに基づいて前記クレーンの前記駆動装置を自動制御して前記クレーンの前記吊荷支持部を移動させるクレーン制御手段と、を備える。
【0009】
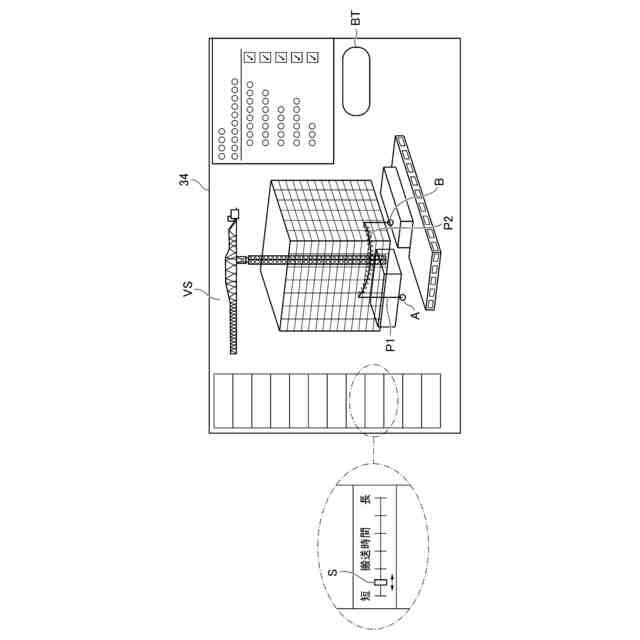
本発明の第2の態様は、上記第1の態様のクレーンの自動運転装置であって、表示部と、前記シミュレーション手段が行った前記吊荷支持部の移動の前記シミュレーションの結果を前記表示部に表示させる表示処理手段と、を備え、前記シミュレーション手段は、三次元モデルを利用して前記シミュレーションを行い、前記表示処理手段は、前記三次元モデル及び前記吊荷支持部の移動軌跡を前記表示部に表示させる。
【0010】
本発明の第3の態様は、上記第1の態様又は上記第2の態様のクレーンの自動運転装置であって、前記シミュレーション手段は、前記搬送時間が最短となる前記制御パラメータを算出する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
4か月前
個人
転落防止階段
28日前
個人
小型クレーン
22日前
株式会社豊田自動織機
産業車両
2か月前
株式会社いうら
車椅子用昇降機
4か月前
株式会社大林組
安全支援システム
3か月前
愛知製鋼株式会社
受け架台
3か月前
個人
エアバック式レスキュー用品
1か月前
ユニパルス株式会社
荷役助力装置
4か月前
岐阜工業株式会社
運搬台車
29日前
個人
垂直自動搬送機
2か月前
株式会社伊藤
滑り止め装置
3か月前
個人
アウトリガー用転倒防止ベース
21日前
大和ハウス工業株式会社
吊上具
3か月前
中国計量大学
電子安全クランプ
1か月前
株式会社キトー
コンテナ吊り具
1日前
株式会社豊田自動織機
フォークリフト
2か月前
山崎産業株式会社
手摺り拭用器具
2か月前
フジテック株式会社
乗客コンベア
20日前
株式会社スギヤス
車両整備用リフト
1か月前
大和ハウス工業株式会社
パネル吊具
4か月前
株式会社タダノ
クレーン装置
8日前
株式会社タダノ
3段ブーム伸縮機構
8日前
神鋼物流株式会社
吊具
15日前
ベストテック株式会社
リフト用補助具
3か月前
フジテック株式会社
エレベータ
1か月前
住友重機械工業株式会社
作業機械
4か月前
フジテック株式会社
マンコンベヤ
1か月前
株式会社大林組
作業支援システム
3か月前
住友重機械工業株式会社
作業機械
4か月前
イワフジ工業株式会社
架線集材システム
1か月前
住友重機械工業株式会社
クレーン
4か月前
イワフジ工業株式会社
架線集材システム
1か月前
住友重機械工業株式会社
クレーン
4か月前
鈴健興業株式会社
消波ブロック保持装置
3か月前
住友重機械工業株式会社
クレーン
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ