TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068764
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023178759
出願日
2023-10-17
発明の名称
操舵制御装置
出願人
株式会社ジェイテクト
,
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250422BHJP(鉄道以外の路面車両)
要約
【課題】車速がゼロよりも大きい場合における制御定数の値を学習できるようにした操舵制御装置を提供する。
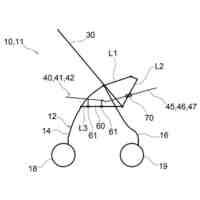
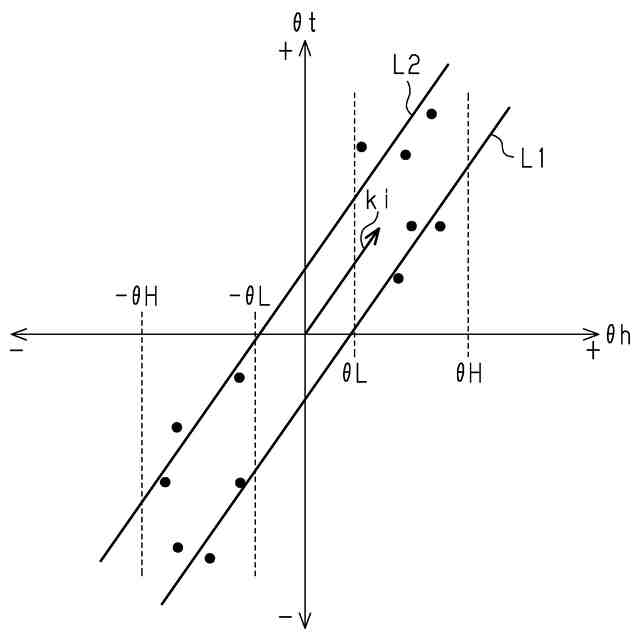
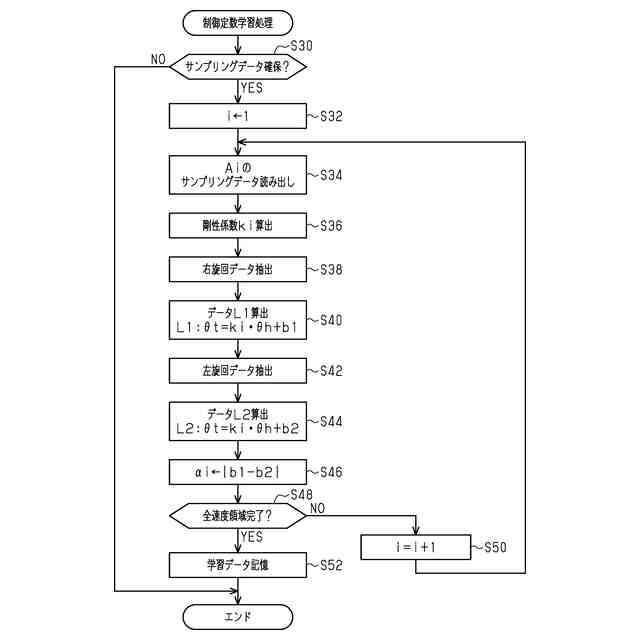
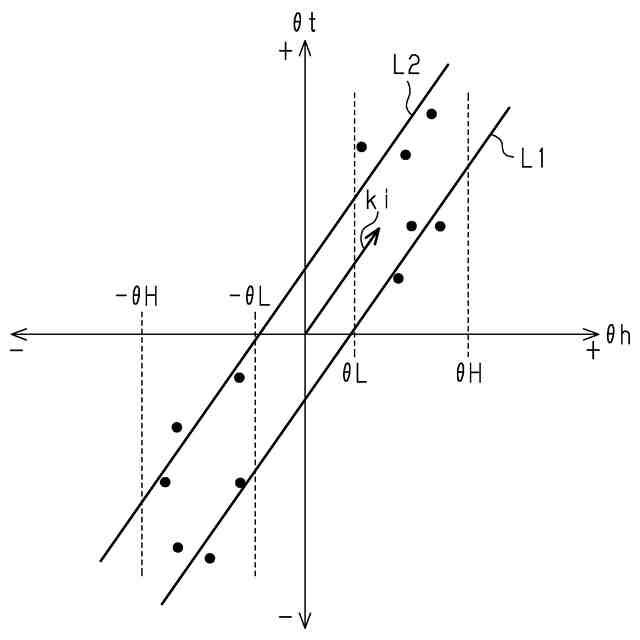
【解決手段】PUは、操舵方向が右旋回方向である場合、操舵角の大きさが学習用最小値θL以上であって学習用最大値θH以下である場合、ヨーレートおよび車速から推定される転舵角と操舵角θhとをサンプリングする。PUは、サンプリングした点に基づき右旋回直線L1を算出する。PUは、操舵方向が左旋回方向である場合、操舵角の大きさが学習用最小値θL以上であって学習用最大値θH以下である場合、ヨーレートおよび車速から推定される転舵角θtと操舵角θhとをサンプリングする。PUは、サンプリングした点に基づき左旋回直線L2を算出する。PUは、右旋回直線L1と左旋回直線L2との切片同士の差を、不感帯幅に代入する。
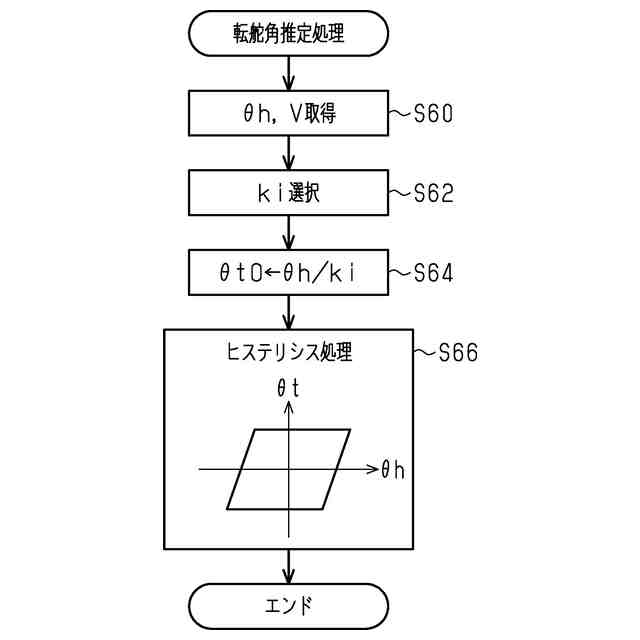
【選択図】図6
特許請求の範囲
【請求項1】
操舵装置を制御対象とする操舵制御装置であって、
前記操舵装置は、
ステアリング軸と、
前記ステアリング軸の回転に伴って転舵する車両の転舵輪と、
を備え、
サンプリング処理、転舵角算出処理、および制御定数学習処理を実行するように構成され、
前記サンプリング処理は、操舵角およびヨーレートを同期してサンプリングする処理であり、
前記操舵角は、前記ステアリング軸の回転角度であり、
前記転舵角算出処理は、前記ヨーレートおよび車速が入力であって、前記転舵輪の転舵角を算出する処理であり、
前記制御定数学習処理は、前記サンプリング処理によってサンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組に基づいて、制御定数を学習する処理であり、
前記制御定数は、前記ステアリング軸の回転変位に対する前記転舵輪の回転変位を示す定数である操舵制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記制御定数は、前記操舵角に対する転舵角の比である剛性係数を含み、
前記制御定数学習処理は、前記操舵角と該操舵角に対応する前記転舵角との複数の組から定まる直線の傾きを前記剛性係数として学習する処理を含む請求項1記載の操舵制御装置。
【請求項3】
前記制御定数は、不感帯幅を含み、
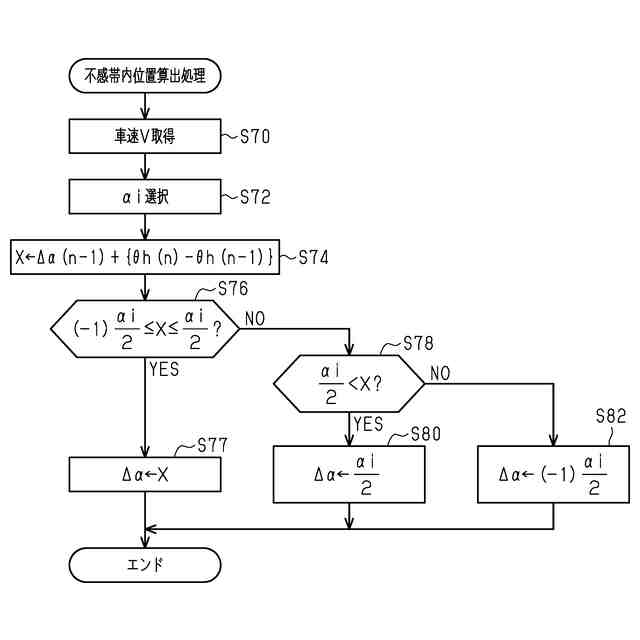
前記不感帯幅は、前記ステアリング軸の回転方向が右旋回方向および左旋回方向のいずれか一方から他方に切り替わってから前記転舵輪が転舵するまでに前記ステアリング軸が回転する回転量であり、
前記制御定数学習処理は、右旋回直線算出処理、左旋回直線算出処理、および不感帯幅算出処理を含み、
前記右旋回直線算出処理は、前記サンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組のうちの前記回転方向が右旋回方向であるときにおける複数の組から右旋回直線を算出する処理であり、
前記左旋回直線算出処理は、前記サンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組のうちの前記回転方向が左旋回方向であるときにおける複数の組から左旋回直線を算出する処理であり、
前記不感帯幅算出処理は、前記右旋回直線と前記左旋回直線との切片の差を前記不感帯幅として算出する処理である請求項1記載の操舵制御装置。
【請求項4】
前記制御定数学習処理は、互いに異なる車速毎に前記サンプリング処理によってサンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組に基づき、前記制御定数を互いに異なる前記車速毎に算出する処理である請求項1記載の操舵制御装置。
【請求項5】
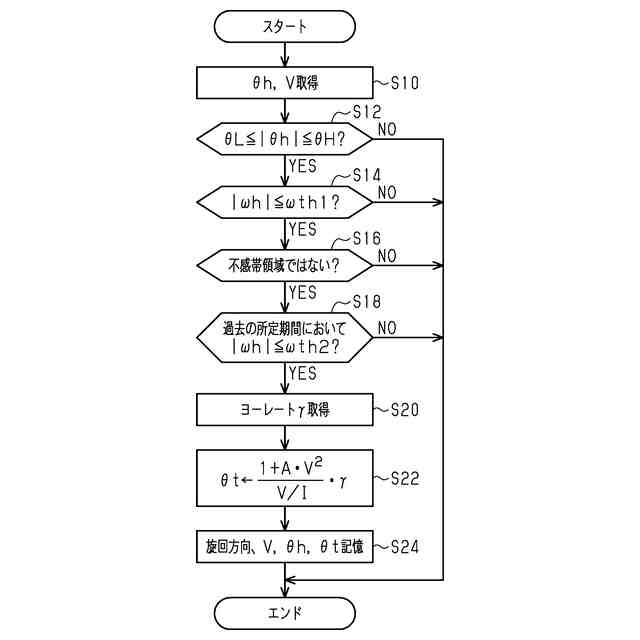
前記サンプリング処理は、前記操舵角の大きさが学習用最小値以上であるときに実行される請求項1記載の操舵制御装置。
【請求項6】
前記サンプリング処理は、前記操舵角の大きさが学習用最大値以下である場合に実行される請求項1記載の操舵制御装置。
【請求項7】
前記サンプリング処理は、前記操舵角の変化速度の大きさが規定速度以下である場合に実行される請求項1記載の操舵制御装置。
【請求項8】
前記サンプリング処理は、前記操舵角および前記転舵角の組が不感帯領域に入っていない場合に実行され、
前記不感帯領域は、前記操舵角の変化に対して前記転舵角が変化しない領域である請求項1記載の操舵制御装置。
【請求項9】
前記サンプリング処理は、直前の所定期間における前記操舵角の変化速度の大きさが閾値以下である場合に実行される請求項1記載の操舵制御装置。
【請求項10】
前記サンプリング処理は、第1状態、第2状態、第3状態、および第4状態のそれぞれにおいて実行され、
前記第1状態は、前記操舵角が右旋回方向に変化しているときにおける前記操舵角が右旋回領域に入っている状態であり、
前記第2状態は、前記操舵角が右旋回方向に変化しているときにおける前記操舵角が左旋回領域に入っている状態であり、
前記第3状態は、前記操舵角が左旋回方向に変化しているときにおける前記操舵角が右旋回領域に入っている状態であり、
前記第4状態は、前記操舵角が左旋回方向に変化しているときにおける前記操舵角が左旋回領域に入っている状態である請求項1記載の操舵制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、操舵制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
たとえば下記特許文献1には、操舵角が変化しても転舵輪の転舵角が変化しない量の最大値であるあそび量を学習する装置が記載されている。この装置は、キースイッチがオン操作されたときに、電動パワーステアリングモータを左右に回転させる。そしてこの装置は、モータを流れる電流が大きくなることに基づき、転舵輪が転舵し始める操舵角を検出する。そして、この装置は、検出された一対の操舵角の差をあそび量に代入する。
【先行技術文献】
【特許文献】
【0003】
特開2022-68056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記あそび量は車速に応じて変化する。しかし、上記装置では、車速がゼロよりも大きい場合のあそび量を算出できない。
【課題を解決するための手段】
【0005】
以下、上記課題を解決するための手段およびその作用効果について記載する。
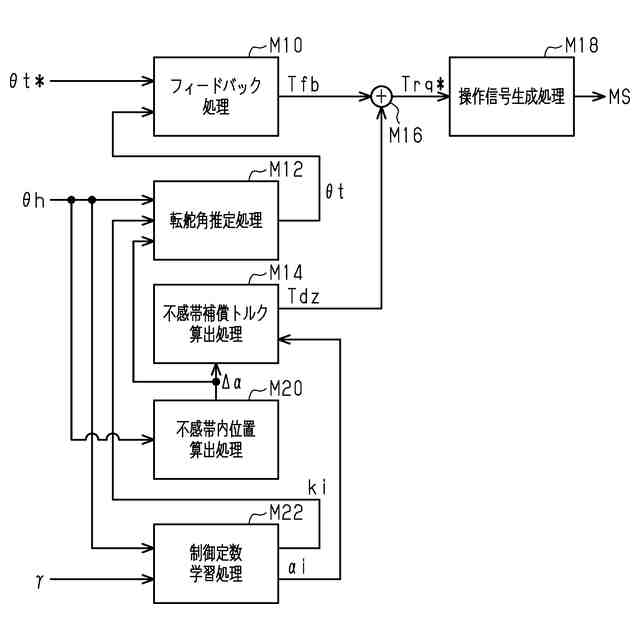
1.操舵装置を制御対象とする操舵制御装置であって、前記操舵装置は、ステアリング軸と、前記ステアリング軸の回転に伴って転舵する車両の転舵輪と、を備え、サンプリング処理、転舵角算出処理、および制御定数学習処理を実行するように構成され、前記サンプリング処理は、操舵角およびヨーレートを同期してサンプリングする処理であり前記操舵角は、前記ステアリング軸の回転角度であり、前記転舵角算出処理は、前記ヨーレートおよび車速が入力であって、前記転舵輪の転舵角を算出する処理であり、前記制御定数学習処理は、前記サンプリング処理によってサンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組に基づいて、制御定数を学習する処理であり、前記制御定数は、前記ステアリング軸の回転変位に対する前記転舵輪の回転変位を示す定数である操舵制御装置である。
【0006】
上記構成では、ヨーレートおよび車速に応じて転舵角を算出する。これにより、車速がゼロよりも大きい場合における転舵角と操舵角との関係を取得できることから、制御定数の値を学習できる。
【0007】
2.前記制御定数は、前記操舵角に対する転舵角の比である剛性係数を含み、前記制御定数学習処理は、前記操舵角と該操舵角に対応する前記転舵角との複数の組から定まる直線の傾きを前記剛性係数として学習する処理を含む上記1記載の操舵制御装置である。
【0008】
操舵角と転舵角との間には比例関係がある。上記構成では、この比例関係を示す剛性係数を学習できる。
3.前記制御定数は、不感帯幅を含み、前記不感帯幅は、前記ステアリング軸の回転方向が右旋回方向および左旋回方向のいずれか一方から他方に切り替わってから前記転舵輪が転舵するまでに前記ステアリング軸が回転する回転量であり、前記制御定数学習処理は、右旋回直線算出処理、左旋回直線算出処理、および不感帯幅算出処理を含み、前記右旋回直線算出処理は、前記サンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組のうちの前記回転方向が右旋回方向であるときにおける複数の組から右旋回直線を算出する処理であり、前記左旋回直線算出処理は、前記サンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組のうちの前記回転方向が左旋回方向であるときにおける複数の組から左旋回直線を算出する処理であり、前記不感帯幅算出処理は、前記右旋回直線と前記左旋回直線との切片の差を前記不感帯幅として算出する処理である上記1または2記載の操舵制御装置である。
【0009】
上記構成では、右旋回直線および左旋回直線を算出することによって、不感帯幅を算出できる。
4.前記制御定数学習処理は、互いに異なる車速毎に前記サンプリング処理によってサンプリングされた前記操舵角と該操舵角に対応する前記転舵角との複数の組に基づき、前記制御定数を互いに異なる前記車速毎に算出する処理である上記1~3のいずれか1つに記載の操舵制御装置。
【0010】
制御定数は車速に応じて変化する傾向がある。そこで上記構成では、車速毎に制御定数を学習する。これにより、車速に応じた適切な制御定数をうることができる。
5.前記サンプリング処理は、前記操舵角の大きさが学習用最小値以上であるときに実行される上記1~4のいずれか1つに記載の操舵制御装置。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発音装置
1か月前
個人
折り畳み自転車
5か月前
個人
電動モビリティ
2か月前
個人
自転車用傘捕捉具
6か月前
個人
自転車用荷台
9か月前
個人
体重掛けリフト台車
5か月前
個人
自由方向乗車自転車
2か月前
個人
自転車用荷物台
5か月前
個人
キャンピングトライク
3か月前
個人
アタッチメント
6か月前
個人
ステアリングの操向部材
8か月前
個人
ステアリングの操向部材
3か月前
株式会社CPM
駐輪機
6か月前
三甲株式会社
台車
8か月前
三甲株式会社
台車
8か月前
株式会社三五
リアサブフレーム
4か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ダイハツ工業株式会社
車両
7か月前
豊田合成株式会社
操舵装置
6か月前
学校法人千葉工業大学
車両
4か月前
ヤマハ発動機株式会社
車両
6か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
ヤマハ発動機株式会社
車両
6か月前
株式会社クボタ
作業車
25日前
コンビ株式会社
乳母車
23日前
個人
自転車の駐輪場システム
8日前
株式会社カインズ
台車
4か月前
株式会社オカムラ
搬送用什器
2か月前
株式会社クボタ
作業車
9か月前
株式会社クボタ
作業車
9か月前
株式会社カインズ
台車
2か月前
ダイハツ工業株式会社
車両構造
9か月前
株式会社Kaedear
給電器
8か月前
日本精機株式会社
鞍型車両用表示装置
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ