TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067729
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177932
出願日
2023-10-14
発明の名称
ワーク加工装置、ワーク加工装置における搬送方法、及び搬送プログラム
出願人
株式会社FUJI
代理人
個人
,
個人
,
個人
主分類
G05B
19/4093 20060101AFI20250417BHJP(制御;調整)
要約
【課題】 より簡便な構成にてワーク変更に対応したワーク加工装置、ワーク加工装置における搬送方法、及び搬送プログラムを提供する。
【解決手段】 ワーク加工装置は、ワークを搬送する搬送装置と、前記ワークの番号であるワーク番号を取得する取得部と、前記ワーク番号と前記搬送装置の動作パターンとを関連付けたデータと、前記取得部によって取得した前記ワーク番号と、から前記ワーク番号に対応した前記動作パターンを導出する導出部と、前記導出部によって導出された前記動作パターンを設定後動作パターンとして設定する設定部と、前記設定部によって設定された前記設定後動作パターンにて前記搬送装置の動作を制御する制御部と、を備えている。
【選択図】 図7
特許請求の範囲
【請求項1】
ワークを搬送する搬送装置と、
前記ワークの番号であるワーク番号を取得する取得部と、
前記ワーク番号と前記搬送装置の動作パターンとを関連付けたデータと、前記取得部によって取得した前記ワーク番号と、から前記ワーク番号に対応した前記動作パターンを導出する導出部と、
前記導出部によって導出された前記動作パターンを設定後動作パターンとして設定する設定部と、
前記設定部によって設定された前記設定後動作パターンにて前記搬送装置の動作を制御する制御部と、
を備えたワーク加工装置。
続きを表示(約 730 文字)
【請求項2】
前記動作パターンは、前記ワークの搬送経路、前記ワークの加工経路、及び前記ワークの搬送状態のうち少なくとも1つを含んでいる請求項1に記載のワーク加工装置。
【請求項3】
ワークを搬送する搬送装置の動作を制御するための搬送プログラムであって、
前記ワークの番号であるワーク番号に対応した前記搬送装置の動作パターンを設定するための動作パターン設定プログラムと、
前記動作パターン設定プログラムによって設定された前記動作パターンにて前記搬送装置を動作させる動作プログラムと、
を少なくとも含んでいる搬送プログラム。
【請求項4】
前記動作パターン設定プログラムは、前記ワーク番号毎に設けられている請求項3に記載の搬送プログラム。
【請求項5】
前記動作パターン設定プログラムは、前記ワーク番号の全てに対応可能に設定されている請求項3に記載の搬送プログラム。
【請求項6】
ワークを搬送する搬送装置を備えたワーク加工装置における搬送方法であって、
前記ワークの番号であるワーク番号を取得する取得工程と、
前記ワーク番号と前記搬送装置の動作パターンとを関連付けたデータと、前記取得工程によって取得した前記ワーク番号と、から前記ワーク番号に対応した前記動作パターンを導出する導出工程と、
前記導出工程によって導出された前記動作パターンを設定後動作パターンとして設定する設定工程と、
前記設定工程によって設定された前記設定後動作パターンにて前記搬送装置の動作を制御する制御工程と、
を備えたワーク加工装置における搬送方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、ワーク加工装置、ワーク加工装置における搬送方法、及び搬送プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
ワーク加工装置の一形式として、特許文献1には、上位コンピュータを用いてNC制御される工作機械と上位コンピュータにて制御され工作機械のワークや工具の着脱移動を行なうロボットとを備える設備が開示されている。この設備において、ワークの変更に伴い上位コンピュータよりロボット変更制御用プログラムにてロボットコントローラに動作制御データを送り、ロボットコントローラでは、平面X軸,Y軸からなる走行横行軸の移動を含めた複数軸制御指令をロボットに出力するロボットの制御方法が開示されている。これによれば、上位コンピュータによりワークが変ってもロボットの変更制御プログラムにてロボットの姿勢データ動作パターン、位置データ、ハンド交換、生爪交換、工具交換等を制御データとしてロボットコントローラに送ることになり、ワークの変更に応じたロボットの動作が可能となり、しかもX軸,Y軸はロボット軸とは異なる外部平面軸で位置決めできて制御が容易となることが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平05-324034号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1に記載されている設備においては、ワークの変更に応じたロボットの動作が可能となるものの、より簡便な構成にてワーク変更に対応したワーク加工装置が要請されている。
【0005】
このような事情に鑑みて、本明細書は、より簡便な構成にてワーク変更に対応したワーク加工装置、ワーク加工装置における搬送方法、及び搬送プログラムを開示する。
【課題を解決するための手段】
【0006】
本明細書は、ワークを搬送する搬送装置と、前記ワークの番号であるワーク番号を取得する取得部と、前記ワーク番号と前記搬送装置の動作パターンとを関連付けたデータと、前記取得部によって取得した前記ワーク番号と、から前記ワーク番号に対応した前記動作パターンを導出する導出部と、前記導出部によって導出された前記動作パターンを設定後動作パターンとして設定する設定部と、前記設定部によって設定された前記設定後動作パターンにて前記搬送装置の動作を制御する制御部と、を備えたワーク加工装置を開示する。
【発明の効果】
【0007】
本開示によれば、ワーク加工装置において、ワーク変更に対応して動作パターンを自動的に変更し、その変更後動作パターンにて搬送装置を制御することが可能となる。すなわち、ワーク変更の際に、ワーク加工装置は、外部からの制御データを受信しなくても、単独でワーク変更に確実に対応することが可能となる。よって、より簡便な構成にてワーク変更に対応することが可能となる。
【図面の簡単な説明】
【0008】
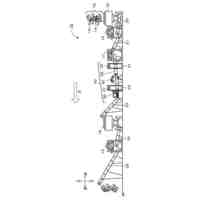
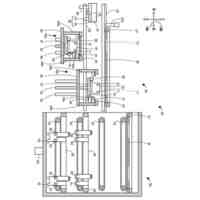
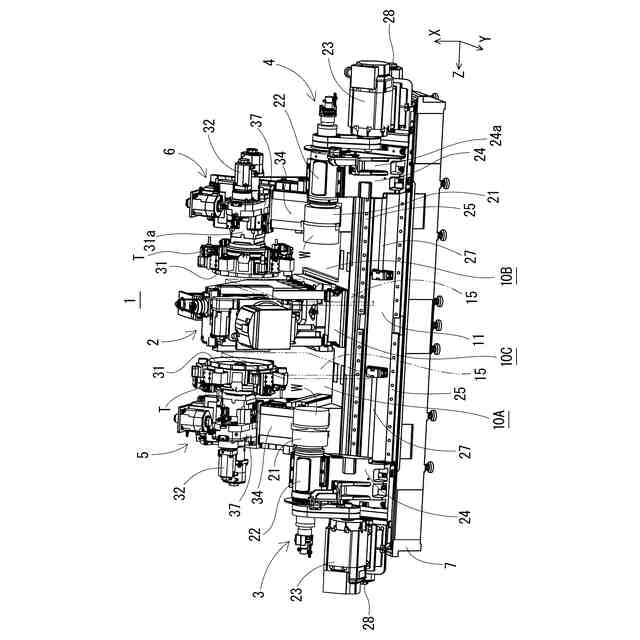
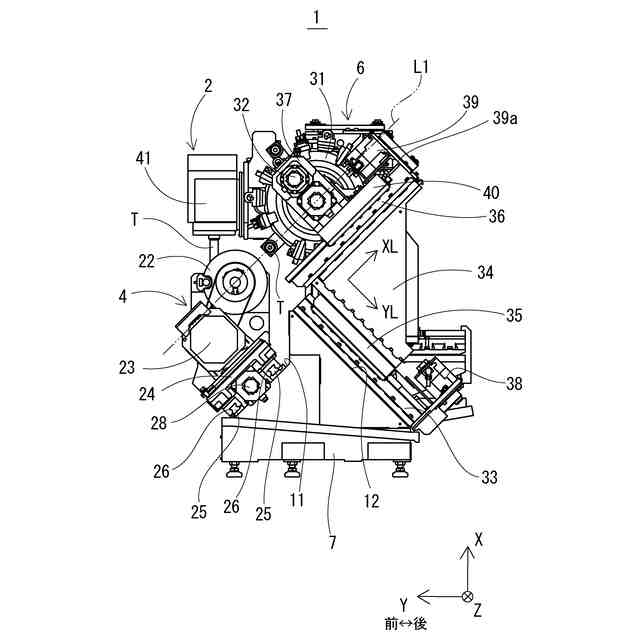
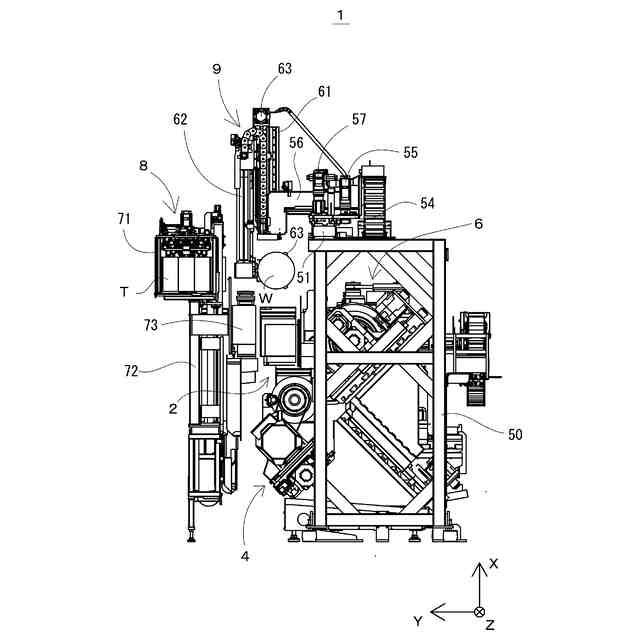
工作機械が適用された複合加工機1の内部を示す斜視図である。
図1に示す複合加工機1の内部を示す側面図である。
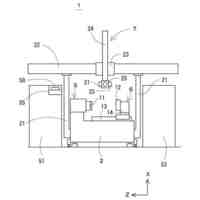
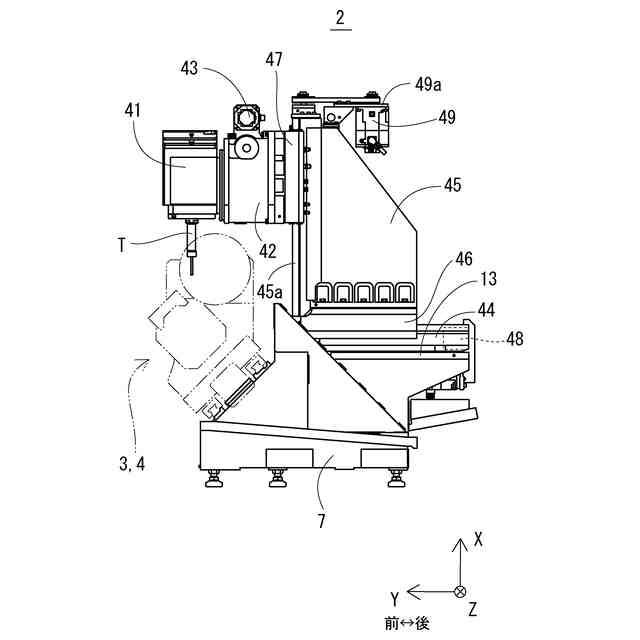
図1に示す工具主軸装置2を示す側面図である。
図1に示す複合加工機1の外観正面図である。
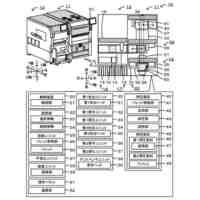
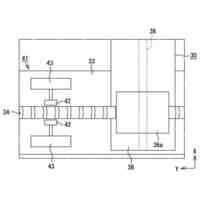
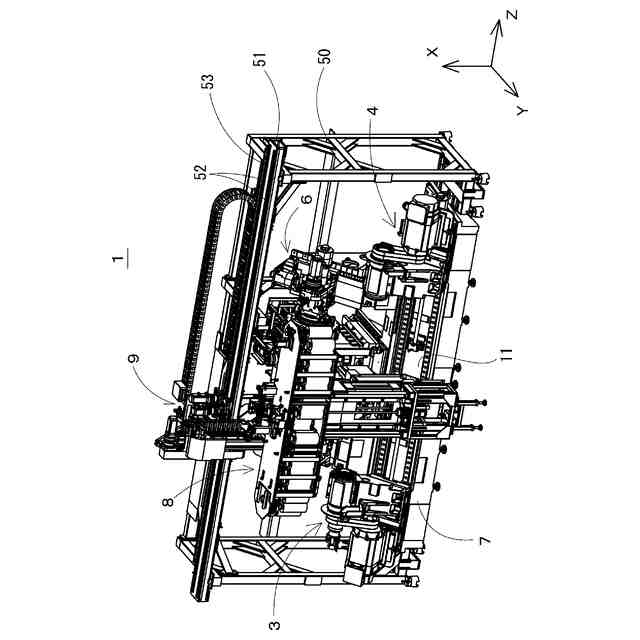
機体カバーを外した複合加工機1を示した斜視図である。
機体カバーを外した複合加工機1を示した側面図である。
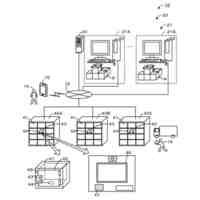
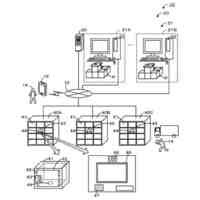
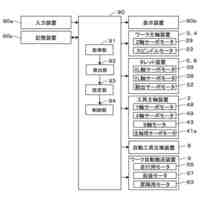
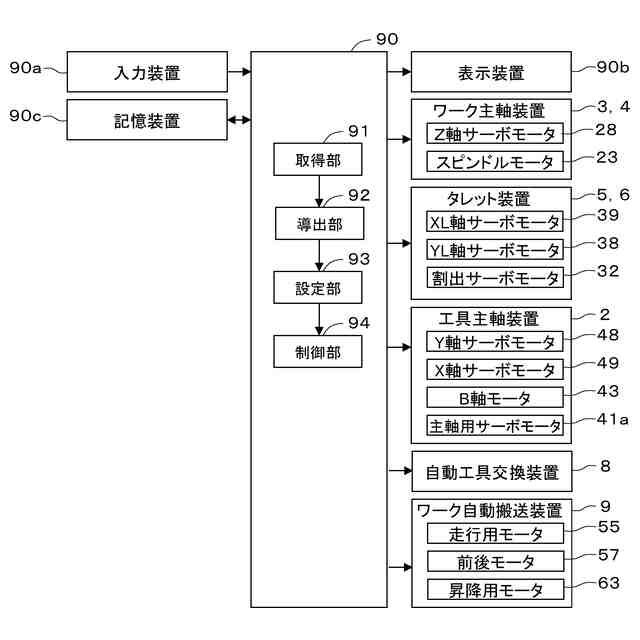
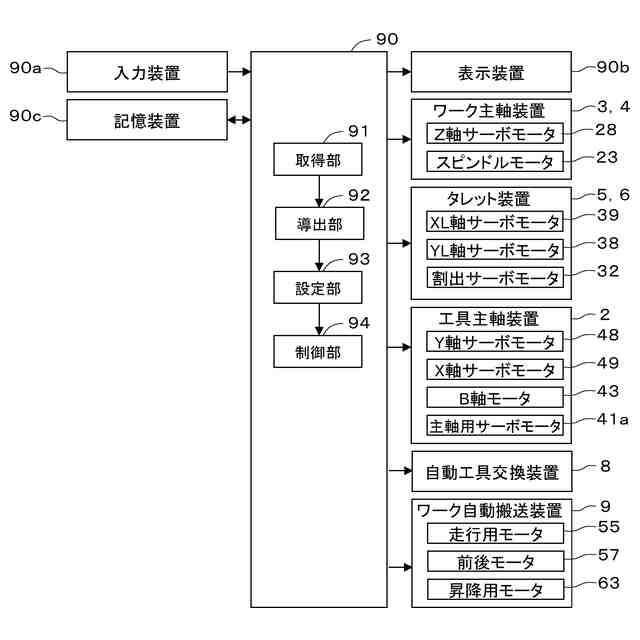
複合加工機1を示すブロック図である。
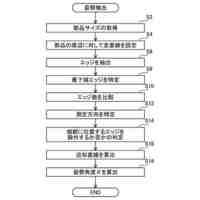
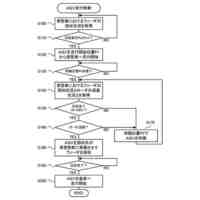
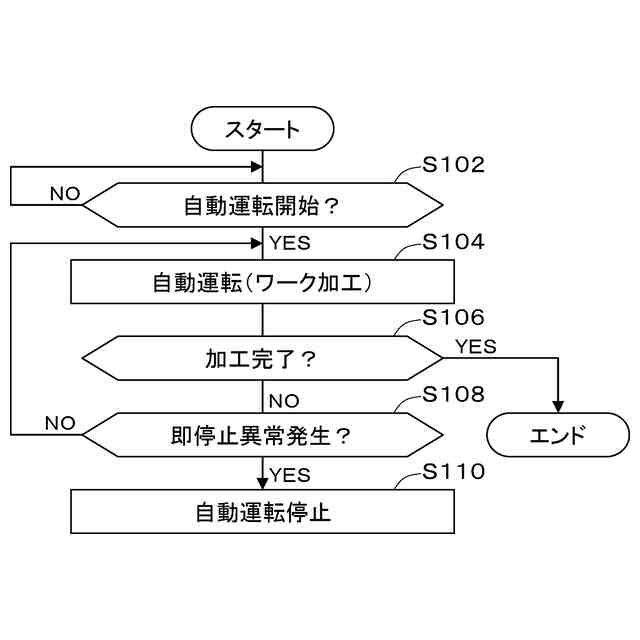
図7に示す制御装置90にて実施されるプログラムを表すフローチャートである。
図7に示す制御装置90にて実施されるプログラムを表すフローチャートである。
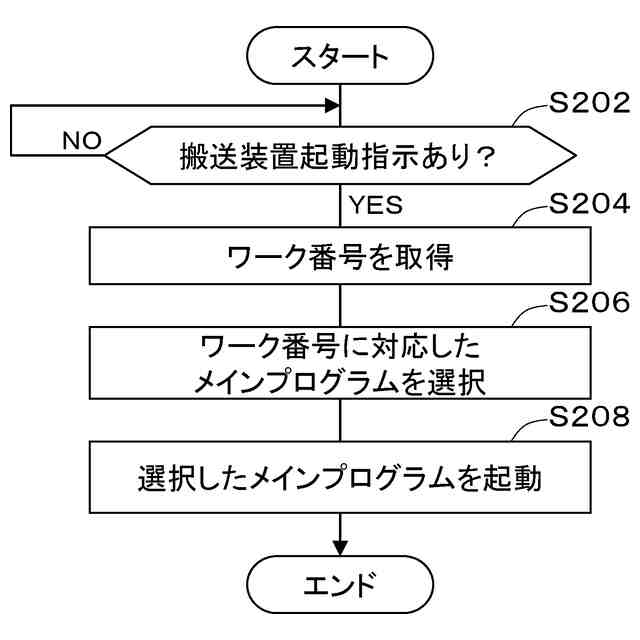
図7に示す制御装置90にて実施されるプログラムを表すフローチャート(メインプログラム)である。
メインプログラムを示す図である。
動作パターン設定プログラムを示す図である。
動作パターン及びシーケンスパラメータを示す図である。
動作パターン2におけるワークWの経路を示す図である。
動作パターン4におけるワークWの経路を示す図である。
設定プログラムを示す図である。
動作プログラムを示す図である。
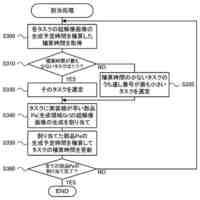
図7に示す制御装置90にて実施される変形例に係るプログラムを表すフローチャートである。
図7に示す制御装置90にて実施される変形例に係るプログラムを表すフローチャート(メインプログラム)である。
【発明を実施するための形態】
【0009】
以下、ワーク加工装置、ワーク加工装置における搬送方法、及び搬送プログラムが適用された複合加工機の一実施形態について説明する。本実施形態の複合加工機1は、NC旋盤とマシニングセンタの両方の機能を持った工作機械である。この複合加工機1は、図1に示すように、把持したワークWに回転を与える第1ワーク主軸装置3および第2ワーク主軸装置4と、ワークWの加工に対応した複数の工具T(タレット工具)を有する第1タレット装置5および第2タレット装置6が、それぞれ左右対称に配置された対向二軸旋盤に加え、機体中央に旋盤では難しい加工を実行するための工具主軸装置2が設けられている。
【0010】
(複合加工機)
複合加工機1は、ワークWを加工する工作機械(ワーク加工装置)であり、第1ワーク主軸装置3(以下、左M/C、M/C1と称する場合がある。)および第2ワーク主軸装置4(以下、右M/C、M/C2と称する場合がある。)、第1タレット装置5および第2タレット装置6、工具主軸装置2が一つのベッド7に搭載されている。特に、複合加工機1は、省スペース化を達成することができるようにコンパクトな構成になっている。具体的には、機体前方側に第1ワーク主軸装置3と第2ワーク主軸装置4とが配置され、その後方には第1タレット装置5と第2タレット装置6が配置されている(図2参照)。そして、複合加工機1は、こうした対向二軸旋盤に加えて第1タレット装置5と第2タレット装置6に挟まれるようにして機体中央に工具主軸装置2が配置されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社FUJI
印刷装置
10日前
株式会社FUJI
基板搬送装置
4日前
株式会社FUJI
保持具収納装置
1か月前
株式会社FUJI
ストッカシステム
20日前
株式会社FUJI
周辺装置制御用治具
19日前
株式会社FUJI
ワーク搬送機付き工作機械
14日前
株式会社FUJI
押圧装置、印刷装置及び押圧部材
14日前
株式会社FUJI
実装機、実装機のヘッド交換方法
20日前
株式会社FUJI
部品実装機及び部品傾き検出方法
1か月前
株式会社FUJI
3次元造形装置およびパレット検出方法
1か月前
株式会社FUJI
実装装置、画像処理装置および画像処理方法
1か月前
株式会社FUJI
部品実装機、方法及びコンピュータプログラム
1か月前
株式会社FUJI
動作プログラム、およびアクチュエータの駆動方法
1か月前
株式会社FUJI
制御装置、管理装置、ストッカシステムおよびストッカ
1か月前
株式会社FUJI
睡眠判定システム、睡眠判定方法および学習モデル生成方法
20日前
株式会社FUJI
実装システム
1か月前
株式会社FUJI
廃材処理システム
1か月前
株式会社FUJI
制御装置、ストッカ、ストッカシステム、管理装置および制御方法
13日前
株式会社FUJI
制御装置、ストッカ、管理装置、ストッカシステムおよび制御方法
17日前
株式会社FUJI
印刷装置及び搬送治具
1か月前
株式会社FUJI
廃テープ回収ユニット
6日前
株式会社FUJI
ワーク加工装置、ワーク加工装置における搬送方法、及び搬送プログラム
1か月前
株式会社FUJI
良否判定方法および基板生産システム
1か月前
株式会社FUJI
良否判定方法および基板生産システム
1か月前
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
株式会社ダイフク
搬送設備
11日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
ペダル機構
10日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
20日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社やまびこ
走行制御装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ