TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025077573
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023189867
出願日
2023-11-07
発明の名称
ワーク搬送機付き工作機械
出願人
株式会社FUJI
代理人
個人
主分類
B23Q
7/04 20060101AFI20250512BHJP(工作機械;他に分類されない金属加工)
要約
【課題】重量測定装置で測定したワーク重量に基づいてワーク搬送機の駆動制御を行うワーク搬送機付き工作機械を提供すること。
【解決手段】加工室内でワークの加工を実行する複数の加工用装置と、前記加工室におけるワークの搬入と搬出とを行うワーク搬送機と、前記ワーク搬送機によってワークを前記加工室内へ搬入する搬送ルート上に配置されるワーク重量測定装置と、前記加工用装置および前記ワーク搬送機を駆動制御する制御装置と、を有し、前記ワーク搬送機は、ワークの搬入時に前記ワーク重量測定装置で測定されたワーク重量の値を基に、予め設定された搬送条件に従い前記制御装置によって駆動制御が行われるワーク搬送機付き工作機械。
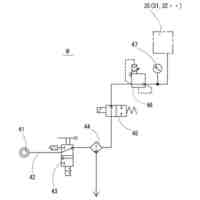
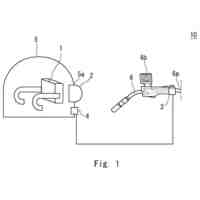
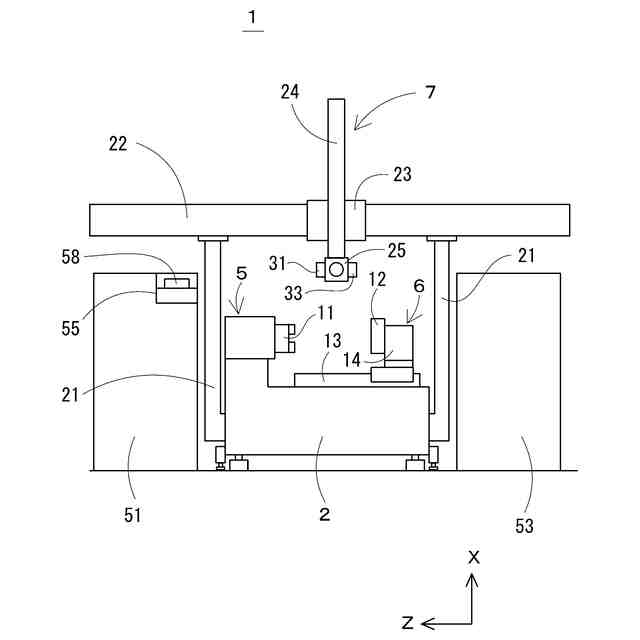
【選択図】図1
特許請求の範囲
【請求項1】
加工室内でワークの加工を実行する複数の加工用装置と、
前記加工室におけるワークの搬入と搬出とを行うワーク搬送機と、
前記ワーク搬送機によってワークを前記加工室内へ搬入する搬送ルート上に配置されるワーク重量測定装置と、
前記加工用装置および前記ワーク搬送機を駆動制御する制御装置と、
を有し、
前記ワーク搬送機は、ワークの搬入時に前記ワーク重量測定装置で測定されたワーク重量の値を基に、予め設定された搬送条件に従い前記制御装置によって駆動制御が行われるワーク搬送機付き工作機械。
続きを表示(約 320 文字)
【請求項2】
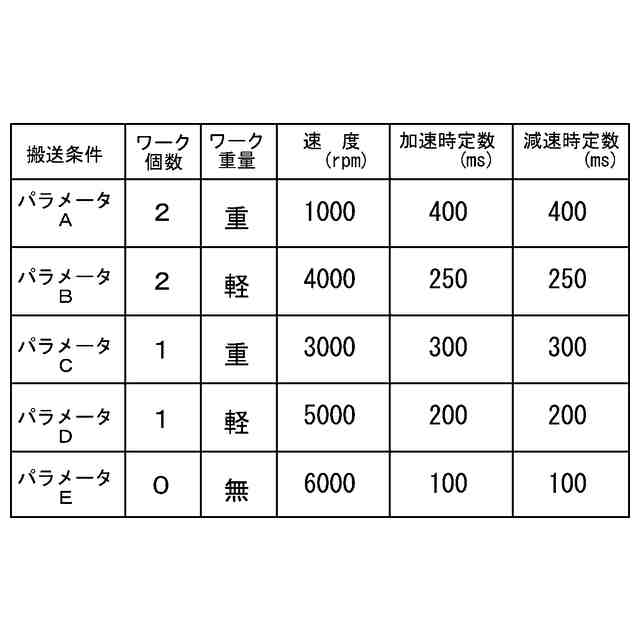
前記搬送条件は、ワーク重量に応じて設定された搬送速度、加速時定数および減速時定数である請求項1に記載のワーク搬送機付き工作機械。
【請求項3】
前記ワーク搬送機は、複数のチャック機構を備えたロボットハンドによってワークを搬送するものであり、ワーク重量およびワーク数によって決定された前記搬送条件に従い、前記制御装置によって駆動制御が行われる請求項1または請求項2に記載のワーク搬送機付き工作機械。
【請求項4】
前記制御装置は、前記ワーク重量測定装置で測定されたワーク重量の値から、前記ワーク搬送機によって前記加工室へと搬入するワークの適否を判定する請求項1に記載のワーク搬送機付き工作機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搭載したワーク搬送機によってワークを搬入および搬出する工作機械であって、重量測定装置で測定された搬入時のワーク重量に基づいてワーク搬送機の駆動制御が行われるワーク搬送機付き工作機械に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
ワークの自動加工が行われる工作機械にはワーク搬送機が一体に設けられ、その搬送制御によって加工室へのワークの搬入および搬出が行われる。下記特許文献1には、ワーク重量に応じた搬送速度調整が可能な、ワーク搬送機付き工作機械に関する従来例が開示されている。その工作機械は、ワークを把持するためのチャック機構を備えたロボットハンドが、サーボモータからなる駆動部に無端ベルトの駆動伝達手段によって連結されている。また、そのロボットハンドや駆動伝達手段は、工作機械の左右方向に配置した走行レールに沿って取り付けられている。
【0003】
そして、この従来例には制御部に重量検出手段が設けられ、ワークを把持して移動を開始する時にサーボモータの負荷値から自動的に重量が検出される。重量区分は大、中、小の3つが設定され、制御部には区分毎に予め最適な早送り速度等の搬送速度および、それに最適な加減速の時定数などが搬送条件として設定されている。よって、こうした従来例では、搬送対象であるワークがより重い重量物であれば、揺れの少ないゆっくりとした速度でワーク搬送が行われ、ワークが軽い軽量物の場合には相対的に速い速度でワーク搬送が行われる。
【先行技術文献】
【特許文献】
【0004】
特開2019-42866号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来のワーク搬送機付き工作機械は、ワーク重量をサーボモータの負荷値から検出してワーク搬送速度を決定しているため、制御プログラムが複雑になってしまっていた。また、微小な重量差を測定することが困難であり、加工対象のワークであるか否について判定を行うことまで対応するものではなかった。
【0006】
そこで、本発明は、かかる課題を解決すべく、重量測定装置で測定したワーク重量に基づいてワーク搬送機の駆動制御を行うワーク搬送機付き工作機械を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係るワーク搬送機付き工作機械は、加工室内でワークの加工を実行する複数の加工用装置と、前記加工室におけるワークの搬入と搬出とを行うワーク搬送機と、前記ワーク搬送機によってワークを前記加工室内へ搬入する搬送ルート上に配置されるワーク重量測定装置と、前記加工用装置および前記ワーク搬送機を駆動制御する制御装置と、を有し、前記ワーク搬送機は、ワークの搬入時に前記ワーク重量測定装置で測定されたワーク重量の値を基に、予め設定された搬送条件に従い前記制御装置によって駆動制御が行われるものである。
【発明の効果】
【0008】
前記構成によれば、加工室内で複数の加工用装置による駆動制御によってワークの加工が実行され、その加工室におけるワークの搬入と搬出とがワーク搬送機によって行われるが、ワークを加工室内へと搬入する搬送ルート上に配置されている重量測定装置によってワーク重量が測定されることにより、ワーク搬送機は、その測定値を基に予め設定された搬送条件に従い、制御装置によってその後のワーク搬送機の駆動制御が行われる。
【図面の簡単な説明】
【0009】
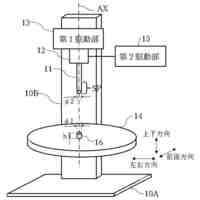
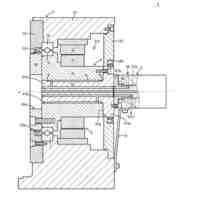
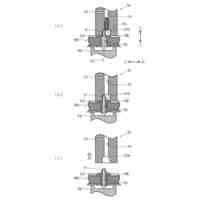
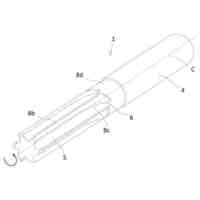
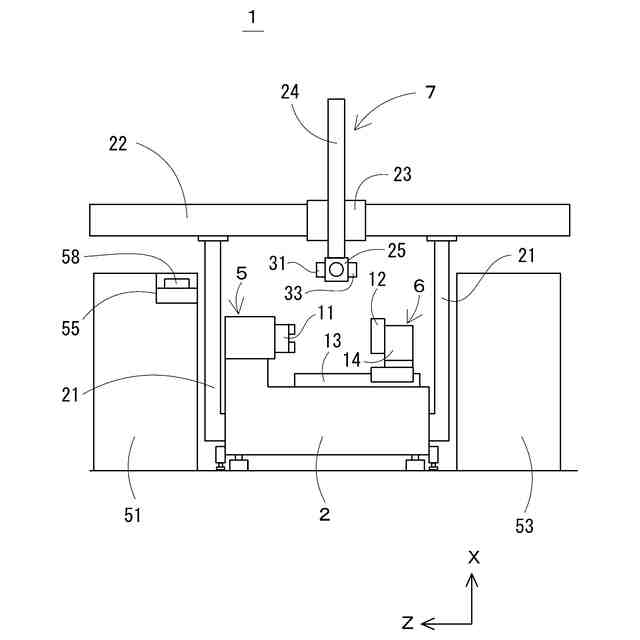
ワーク搬送機付き工作機械の一実施形態を簡易的に示した正面図である。
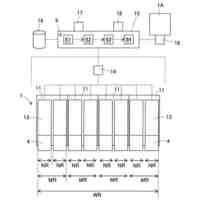
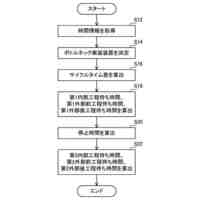
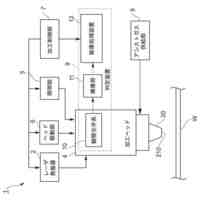
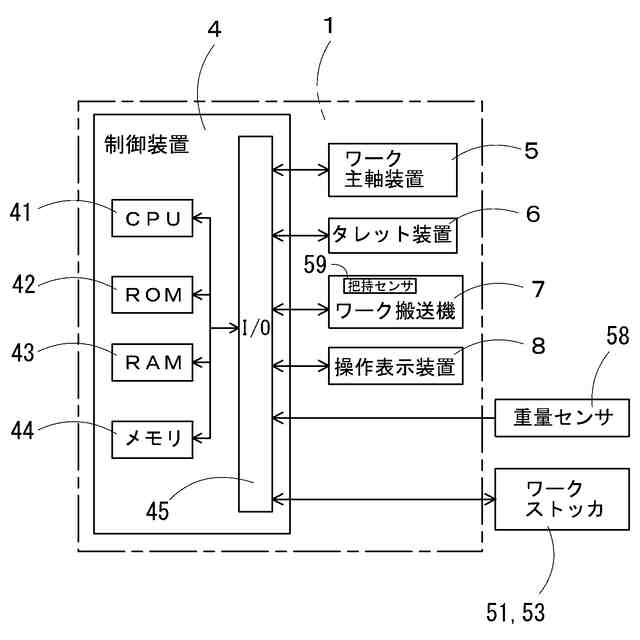
ワーク搬送機付き工作機械を制御する制御システムを示したブロック図である。
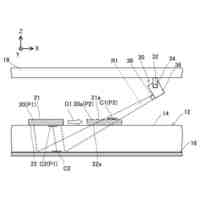
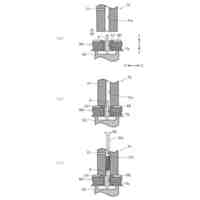
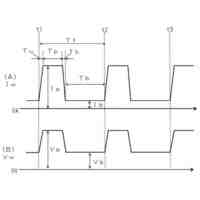
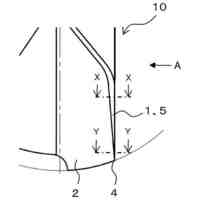
搬送条件を単純化した場合のワーク搬送に関するパラメータを示した図である。
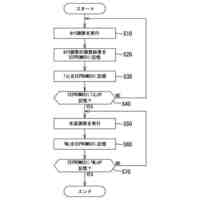
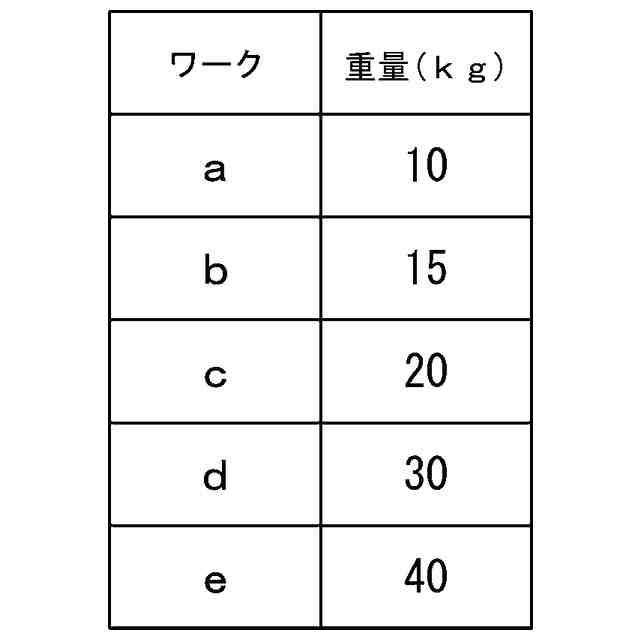
加工対象ワークの適否を判定するワーク重量データを示した図である。
【発明を実施するための形態】
【0010】
本発明に係るワーク搬送機付き工作機械の一実施形態について、図面を参照しながら以下に説明する。図1は、本実施形態のワーク搬送機付き工作機械を簡易的に示した正面図である。このワーク搬送機付き工作機械(以下、単に「工作機械」という)1は、ベッド2が前後左右の4か所に配置されたレベリングブロックによって支持され、各々の高さ調整によって水平出しが行われるよう構成されている。工作機械1は、そうしたベッド2上に搭載されたワーク主軸装置5やタレット装置6などの各種加工用装置が不図示の機体カバーによって覆われ、加工時にはクーラントが噴射さえる閉じられた加工室が構成されている。さらに工作機械1には、加工対象となるワークを機外と加工室との間で搬送するためのガントリー型のワーク搬送機7が設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
9日前
株式会社FUJI
工作機械
11日前
株式会社FUJI
工作機械
12日前
株式会社FUJI
工作機械
12日前
株式会社FUJI
生産支援装置
2日前
株式会社FUJI
加工システム
19日前
株式会社FUJI
基板搬送装置
1か月前
株式会社FUJI
最適化システム
25日前
株式会社FUJI
対基板作業システム
25日前
株式会社FUJI
メンテナンス方法及び造形装置
26日前
株式会社FUJI
報知システム及び報知システムの制御方法
24日前
株式会社FUJI
算出システム、管理装置、及びコンピュータプログラム
1か月前
株式会社FUJI
管理装置
1か月前
株式会社FUJI
実装システム
25日前
株式会社FUJI
対基板作業機、および電磁モータの回転の規制を解除する解除方法
9日前
個人
タップ
1か月前
個人
加工機
1か月前
麗豊実業股フン有限公司
ラクトバチルス・パラカセイNB23菌株及びそれを筋肉量の増加や抗メタボリック症候群に用いる用途
1か月前
株式会社北川鉄工所
回転装置
24日前
日東精工株式会社
ねじ締め機
1か月前
株式会社不二越
ドリル
1か月前
日東精工株式会社
ねじ締め装置
5日前
株式会社FUJI
工作機械
9日前
日進工具株式会社
エンドミル
2か月前
株式会社アンド
半田付け方法
1か月前
株式会社アンド
半田付け方法
1か月前
株式会社ダイヘン
多層盛り溶接方法
2か月前
エフ・ピー・ツール株式会社
リーマ
2か月前
村田機械株式会社
レーザ加工機
1か月前
村田機械株式会社
レーザ加工機
1か月前
株式会社トヨコー
被膜除去方法
1か月前
トヨタ自動車株式会社
溶接ヘッド
25日前
株式会社不二越
超硬合金製ドリル
2か月前
トヨタ自動車株式会社
溶接マスク
5日前
住友重機械工業株式会社
加工装置
2日前
トヨタ自動車株式会社
溶接ヘッド
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ