TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025058729
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023168850
出願日
2023-09-28
発明の名称
作業車両
出願人
三菱マヒンドラ農機株式会社
代理人
弁理士法人近島国際特許事務所
主分類
A01B
69/00 20060101AFI20250402BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】撮像画像から前行程の作業跡が消失した場合でも、撮像画像に基づいて現行程の残りの移動距離を直進走行するように操舵装置を制御し、作業性を向上した作業車両を提供する。
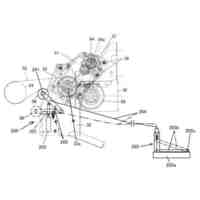
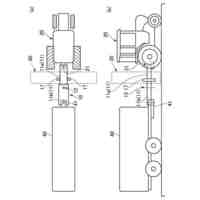
【解決手段】作業車両(1)は、撮像部(15)と、操舵装置(20)と、前行程の作業跡に沿って走行機体(4)が走行するように操舵装置(20)を制御する第1の制御と、作業跡とは異なる目標地点(TG2)に向けて走行機体(4)が直進走行するように操舵装置(20)を制御する第2の制御と、を実行可能な制御部(40,100)と、報知部(13,54,55)と、を備える。制御部(40,100)は、第1の制御を実行中に、撮像画像から前行程の作業跡が消失した場合に、撮像画像に基づいて現行程の残りの移動距離(D1)を算出すると共に第1の制御から第2の制御に切り替え、移動距離(D1)を走行後に報知部(13,54,55)を動作させる。
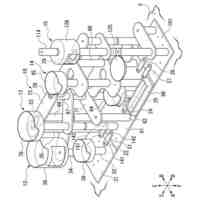
【選択図】図2
特許請求の範囲
【請求項1】
圃場を走行可能な走行機体と、
前記走行機体に設けられ、前記走行機体の前方を撮像可能な撮像部と、
前記走行機体を操舵する操舵装置と、
前記撮像部から得られた撮像画像の中の、前記走行機体の側方にある前行程の作業跡に沿って前記走行機体が走行するように前記操舵装置を制御する第1の制御と、前記撮像画像の中の、前記作業跡とは異なる目標地点に向けて前記走行機体が直進走行するように前記操舵装置を制御する第2の制御と、を実行可能な制御部と、
作業者に報知するための報知部と、を備え、
前記制御部は、前記第1の制御を実行中に、前記撮像画像から前記前行程の前記作業跡が消失した場合に、前記撮像画像に基づいて現行程の残りの移動距離を算出すると共に前記第1の制御から前記第2の制御に切り替え、前記移動距離を走行後に前記報知部を動作させる、
ことを特徴とする作業車両。
続きを表示(約 320 文字)
【請求項2】
前記制御部は、前記第2の制御において前記移動距離を走行後に、旋回をするための準備動作を実行する、
ことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御部は、前記第2の制御において前記移動距離を走行後に、前記第2の制御を終了する、
ことを特徴とする請求項1又は2に記載の作業車両。
【請求項4】
前記制御部は、前記第1の制御から前記第2の制御に切り替えた際に、前記報知部を第1の態様で動作させ、前記第2の制御において前記移動距離を走行後に、前記報知部を前記第1の態様とは異なる第2の態様で動作させる、
ことを特徴とする請求項1又は2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクタ等の作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、例えば特許文献1、2に開示されているように、カメラの撮像によって得られた撮像画像を用いて走行機体を操舵制御する技術が知られている。具体的には、撮像画像から抽出した目標物に向かって走行機体が直進走行するように、走行機体を操舵制御する技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-117257号公報
特開2017-211893号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1、2に記載の技術では、カメラの画角から目標物が消失すると、目標物に向かった直進走行が不能になり、走行機体の操舵制御の継続ができなくなってしまい、作業性に問題があった。
【0005】
そこで、本発明は、撮像画像から前行程の作業跡が消失した場合でも、撮像画像に基づいて現行程の残りの移動距離を直進走行するように操舵装置を制御し、作業性を向上した作業車両を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
本発明の作業車両(1)は、
圃場を走行可能な走行機体(4)と、
前記走行機体(4)に設けられ、前記走行機体(4)の前方を撮像可能な撮像部(15)と、
前記走行機体(4)を操舵する操舵装置(20)と、
前記撮像部(15)から得られた撮像画像の中の、前記走行機体(4)の側方にある前行程の作業跡に沿って前記走行機体(4)が走行するように前記操舵装置(20)を制御する第1の制御と、前記撮像画像の中の、前記作業跡とは異なる目標地点(TG2)に向けて前記走行機体(4)が直進走行するように前記操舵装置(20)を制御する第2の制御と、を実行可能な制御部(40,100)と、
作業者に報知するための報知部(13,54,55)と、を備え、
前記制御部(40,100)は、前記第1の制御を実行中に、前記撮像画像から前記前行程の前記作業跡が消失した場合に、前記撮像画像に基づいて現行程の残りの移動距離(D1)を算出すると共に前記第1の制御から前記第2の制御に切り替え、前記移動距離(D1)を走行後に前記報知部(13,54,55)を動作させる、
ことを特徴とする。
【0007】
また、例えば図5を参照して、前記制御部(40,100)は、前記第2の制御において前記移動距離(D1)を走行後に、旋回をするための準備動作を実行する、
ことを特徴とする。
【0008】
また、例えば図5を参照して、前記制御部(40,100)は、前記第2の制御において前記移動距離(D1)を走行後に、前記第2の制御を終了する、
ことを特徴とする。
【0009】
また、例えば図5を参照して、前記制御部(40,100)は、前記第1の制御から前記第2の制御に切り替えた際に、前記報知部(13,54,55)を第1の態様で動作させ、前記第2の制御において前記移動距離(D1)を走行後に、前記報知部(13,54,55)を前記第1の態様とは異なる第2の態様で動作させる。
【0010】
なお、上述カッコ内の符号は、図面と対照するためのものであるが、何ら本発明の構成を限定するものではない。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
柄杓じょうろ
20日前
個人
仕切り板付き植木鉢
17日前
井関農機株式会社
作業車両
7日前
美らくる株式会社
栽培方法
13日前
井関農機株式会社
収穫作業機
4日前
個人
プランターシーブ
6日前
個人
ペット用排泄物収納袋取付具
5日前
個人
ショベルバケット型スコップ
7日前
三菱マヒンドラ農機株式会社
移植機
10日前
トヨタ自動車株式会社
飛行体
5日前
井関農機株式会社
農業支援システム
7日前
伊東電機株式会社
植物栽培装置
20日前
東都興業株式会社
シート開閉装置
今日
井関農機株式会社
収穫作業機
4日前
株式会社カインズ
キャットタワー
13日前
群馬県
節足動物および腹足動物の判定システム
11日前
日本化薬株式会社
マイクロカプセル農薬組成物
18日前
大和ハウス工業株式会社
栽培装置
12日前
株式会社アクアデザインアマノ
植物育成容器
5日前
花王株式会社
給水体及び植物の栽培方法
4日前
株式会社シマノ
釣用リール
4日前
株式会社シマノ
釣竿および釣糸係止部材
5日前
株式会社クロス・クローバー・ジャパン
保定袋
7日前
タキゲン製造株式会社
イチゴの果実収穫用切断具
5日前
株式会社クボタ
農業管理システム
4日前
株式会社神鋼環境ソリューション
供試魚保持装置
10日前
株式会社すとろーはうす
動物用衣服
12日前
個人
魚が掛かりやすく根掛かりしにくいひと組の釣り針
3日前
株式会社クボタ
農業管理システム
4日前
松山株式会社
畦形成装置及び畦形成システム
10日前
株式会社北海コーキ
農耕用牽引車における連結構造
12日前
井関農機株式会社
作業車両
13日前
個人
アマモの育成方法及びアマモの育成装置
19日前
株式会社アンテック
防鳥装置及び防鳥装置の設置方法
10日前
山田電器工業株式会社
シンカー
4日前
ヤンマーホールディングス株式会社
コンバイン
11日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ