TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025057915
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167750
出願日
2023-09-28
発明の名称
遠隔操作装置及び遠隔操作方法
出願人
いすゞ自動車株式会社
代理人
弁理士法人創光国際特許事務所
主分類
B62D
6/00 20060101AFI20250402BHJP(鉄道以外の路面車両)
要約
【課題】ステアリング反力の精度を向上させる。
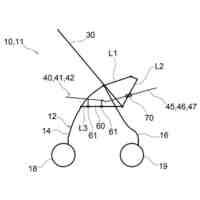
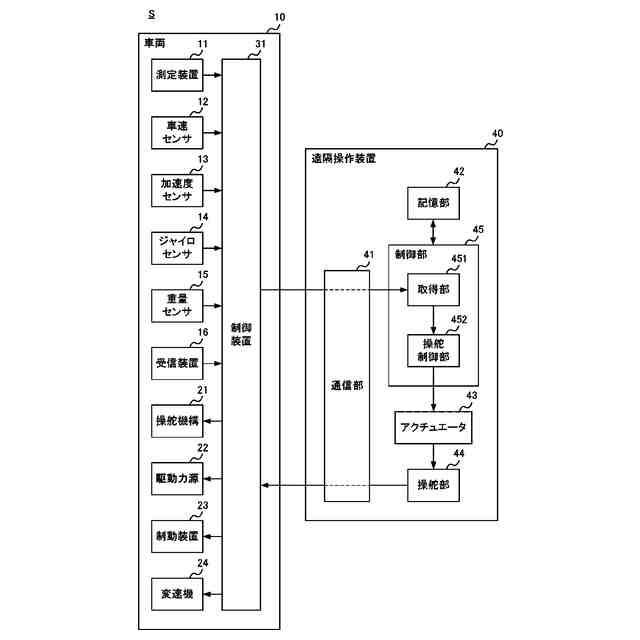
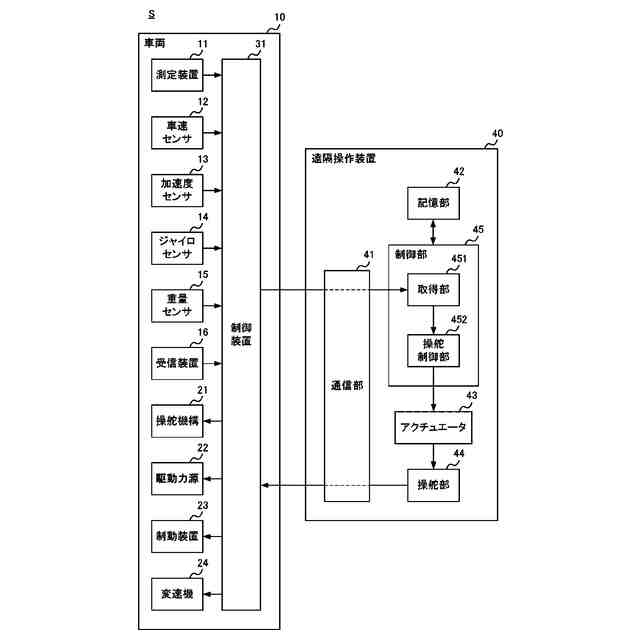
【解決手段】遠隔操作装置40は、車両10を遠隔操作するための遠隔操作装置40であって、路面から車両10が備えるタイヤに作用する反力に基づく操舵トルクを含む、車両10の状態情報を取得する取得部451と、操舵トルクに基づいて、遠隔操作装置40が備えるステアリングホイールに操舵反力を付与するアクチュエータを動作させる操舵制御部452と、を有し、操舵制御部452は、取得部451が所定の時刻に所定の量の状態情報を取得していない場合、所定の時刻より前の時刻に取得した状態情報に基づいて、所定の時刻の操舵トルクを決定する。
【選択図】図1
特許請求の範囲
【請求項1】
車両を遠隔操作するための遠隔操作装置であって、
路面から前記車両が備えるタイヤに作用する反力に基づく操舵トルクを含む、前記車両の状態情報を取得する取得部と、
前記操舵トルクに基づいて、前記遠隔操作装置が備えるステアリングホイールに操舵反力を付与するアクチュエータを動作させる操舵制御部と、
を有し、
前記操舵制御部は、前記取得部が所定の時刻に所定の量の前記状態情報を取得していない場合、前記所定の時刻より前の時刻に取得した前記状態情報に基づいて、前記所定の時刻の前記操舵トルクを決定する、
遠隔操作装置。
続きを表示(約 1,400 文字)
【請求項2】
前記操舵制御部は、前記取得部が前記所定の時刻から所定の周期で前記所定の量の前記状態情報を取得していない状態が所定の時間未満継続していることを条件として、前記所定の周期が経過した時刻毎に、当該時刻より前の時刻に取得した前記状態情報に基づいて前記操舵トルクを決定する、
請求項1に記載の遠隔操作装置。
【請求項3】
前記状態情報は、前記車両の車速、前記車両の加速度、前記車両の角速度、前記車両の重量及び前記車両の位置をさらに含み、
前記操舵制御部は、路面の形状を示す地図情報と前記車両の位置とに基づく、前記車両が走行する車線の路面形状、前記車速と前記加速度と前記角速度と前記重量とに基づく前記車両の運動状態、及び前記路面形状と前記運動状態とに基づく前記車両の接地状態に基づいて、前記操舵トルクを決定する、
請求項1又は2に記載の遠隔操作装置。
【請求項4】
前記操舵制御部は、前記操舵トルクと、前記接地状態が示す接地面の重心位置と、に基づいて、前記操舵反力を決定する、
請求項3に記載の遠隔操作装置。
【請求項5】
前記操舵制御部は、前記取得部が前記所定の時刻から所定の周期で前記所定の量の前記状態情報を取得していない状態が所定の時間以上継続していることを条件として、前記所定の周期が経過した時刻毎に、前記車両が走行する予定の位置と時刻とを含む走行計画情報、及び路面の形状を示す地図情報に基づいて、前記所定の周期が経過した時刻において前記車両が走行すると推定された位置の前記操舵トルクを決定する、
請求項1又は2に記載の遠隔操作装置。
【請求項6】
前記操舵制御部は、前記所定の周期が経過した時刻に決定した第1操舵トルクと、当該時刻より前記所定の周期前の時刻に決定した第2操舵トルクとの差が所定の操舵トルク未満になるように前記第1操舵トルクを決定する、
請求項5に記載の遠隔操作装置。
【請求項7】
前記操舵制御部は、前記所定の時刻に決定した第3操舵トルクと、前記所定の時刻より後の時刻に前記取得部が取得した第4操舵トルクと、の差が所定の操舵トルク以上である場合、前記所定の時刻より後の時刻において、前記第3操舵トルクに、前記車両の車速に基づく補正トルクを加算する、
請求項1に記載の遠隔操作装置。
【請求項8】
前記操舵制御部は、前記所定の時刻に決定した第3操舵トルクの向きと、前記所定の時刻より後の時刻に前記取得部が取得した第4操舵トルクの向きが異なる場合、前記所定の時刻より後の時刻において、前記第3操舵トルクに、前記車両の車速に基づく補正トルクを加算する、
請求項1に記載の遠隔操作装置。
【請求項9】
プロセッサが実行する、
路面から車両が備えるタイヤに作用する反力に基づく操舵トルクを含む、前記車両の状態情報を取得する取得工程と、
前記操舵トルクに基づいて、前記車両を遠隔操作するための遠隔操作装置が備えるステアリングホイールに操舵反力を付与するアクチュエータを動作させる制御工程と、
を有し、
前記取得工程において所定の時刻に所定の量の前記状態情報を取得していない場合、前記制御工程において、前記所定の時刻より前の時刻に取得した前記状態情報に基づいて、前記所定の時刻の前記操舵トルクを決定する、
遠隔操作方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作装置及び遠隔操作方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1の移動体遠隔操作システムは、バイラテラル制御をすることにより、操作システムと移動体システムとの間で、直進運動、回転運動、及びステアリング反力の状態を一致させる。
【先行技術文献】
【特許文献】
【0003】
特許第5496717号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の移動体遠隔操作システムにおいては、車両と、車両を遠隔から操作する遠隔操作装置との間でバイラテラル制御を実行した場合、車両と遠隔操作装置との通信においてデータが遅延したり欠損したりすると、遠隔操作装置は、誤ったステアリング反力を発生する。その結果、遠隔操作装置の操作者は、遠隔操作装置を用いて車両を正しく操作することができないため、車両が不安定な動作をするという問題があった。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、ステアリング反力の精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様に係る遠隔操作装置は、車両を遠隔操作するための遠隔操作装置であって、路面から前記車両が備えるタイヤに作用する反力に基づく操舵トルクを含む、前記車両の状態情報を取得する取得部と、前記操舵トルクに基づいて、前記遠隔操作装置が備えるステアリングホイールに操舵反力を付与するアクチュエータを動作させる操舵制御部と、を有し、前記操舵制御部は、前記取得部が所定の時刻に所定の量の前記状態情報を取得していない場合、前記所定の時刻より前の時刻に取得した前記状態情報に基づいて、前記所定の時刻の前記操舵トルクを決定する。
【0007】
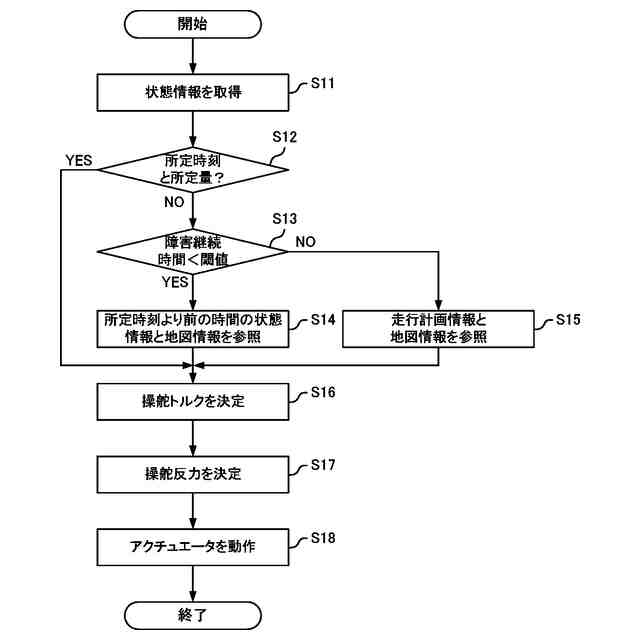
前記操舵制御部は、前記取得部が前記所定の時刻から所定の周期で前記所定の量の前記状態情報を取得していない状態が所定の時間未満継続していることを条件として、前記所定の周期が経過した時刻毎に、当該時刻より前の時刻に取得した前記状態情報に基づいて前記操舵トルクを決定してもよい。
【0008】
前記状態情報は、前記車両の車速、前記車両の加速度、前記車両の角速度、前記車両の重量及び前記車両の位置をさらに含み、前記操舵制御部は、路面の形状を示す地図情報と前記車両の位置とに基づく、前記車両が走行する車線の路面形状、前記車速と前記加速度と前記角速度と前記重量とに基づく前記車両の運動状態、及び前記路面形状と前記運動状態とに基づく前記車両の接地状態に基づいて、前記操舵トルクを決定してもよい。
【0009】
前記操舵制御部は、前記操舵トルクと、前記接地状態が示す接地面の重心位置と、に基づいて、前記操舵反力を決定してもよい。
【0010】
前記操舵制御部は、前記取得部が前記所定の時刻から所定の周期で前記所定の量の前記状態情報を取得していない状態が所定の時間以上継続していることを条件として、前記所定の周期が経過した時刻毎に、前記車両が走行する予定の位置と時刻とを含む走行計画情報、及び路面の形状を示す地図情報に基づいて、前記所定の周期が経過した時刻において前記車両が走行すると推定された位置の前記操舵トルクを決定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
折り畳み自転車
4か月前
個人
電動モビリティ
1か月前
個人
発音装置
1か月前
個人
自転車用傘捕捉具
5か月前
個人
自転車用荷台
8か月前
個人
体重掛けリフト台車
4か月前
個人
自由方向乗車自転車
1か月前
個人
キャンピングトライク
2か月前
個人
アタッチメント
5か月前
個人
自転車用荷物台
4か月前
個人
ステアリングの操向部材
8か月前
株式会社CPM
駐輪機
5か月前
個人
ステアリングの操向部材
2か月前
祖峰企画株式会社
平台車
9か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
7か月前
株式会社三五
リアサブフレーム
4か月前
ダイハツ工業株式会社
車両
6か月前
学校法人千葉工業大学
車両
3か月前
学校法人千葉工業大学
車両
3か月前
学校法人千葉工業大学
車両
3か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
豊田合成株式会社
操舵装置
5か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
コンビ株式会社
乳母車
4日前
株式会社クボタ
作業車
6日前
株式会社カインズ
台車
1か月前
株式会社オカムラ
搬送用什器
1か月前
株式会社クボタ
作業車
9か月前
株式会社クボタ
作業車
9か月前
株式会社カインズ
台車
4か月前
株式会社宝島社
アシスト自転車
8か月前
株式会社ジェイテクト
操舵装置
1か月前
株式会社Kaedear
給電器
7か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ