TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025024464
公報種別
公開特許公報(A)
公開日
2025-02-20
出願番号
2023128597
出願日
2023-08-07
発明の名称
操舵装置
出願人
株式会社ジェイテクト
代理人
個人
主分類
B62D
6/00 20060101AFI20250213BHJP(鉄道以外の路面車両)
要約
【課題】外乱トルクによる補償量を決定する。
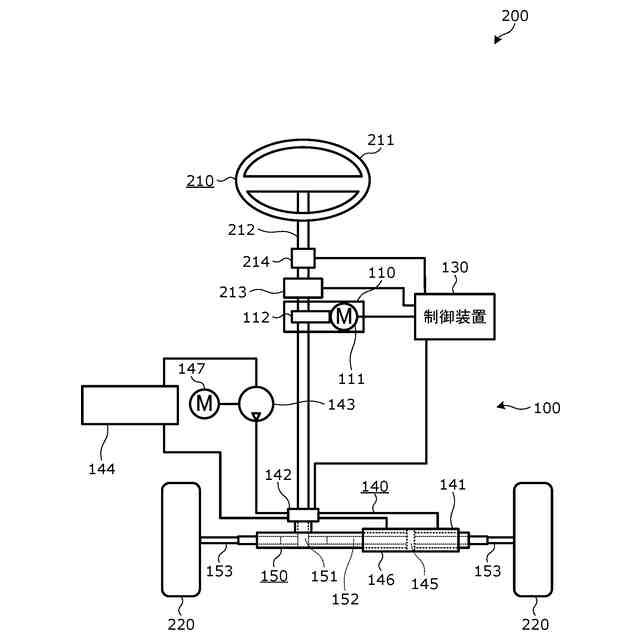
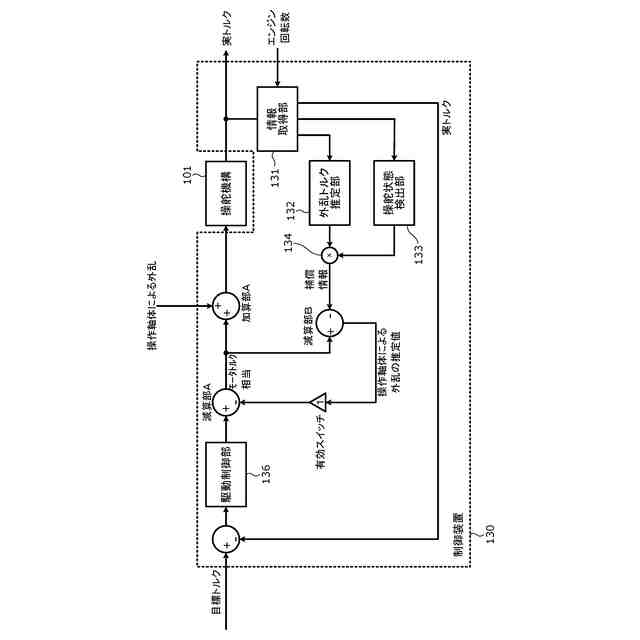
【解決手段】操舵装置100は、操作軸体212を回転させて転舵輪220を転舵する転舵機構150と、転舵機構150に油圧転舵力を付与する油圧機構140と、操作軸体212に第一トルクを付与する第一電動モータ111と、第一電動モータ111を制御する制御装置130と、を備え、制御装置130は、センサ情報を取得する情報取得部131と、操舵装置100に起因して操作軸体212に発生する軸周りに振動する振動トルク、および路面から操作軸体212に作用する軸周りの第二トルクを含む外乱トルクをセンサ情報の少なくとも一部に基づき推定する外乱トルク推定部132と、センサ情報に応じて外乱トルクを処理するゲイン演算値を出力する操舵状態検出部133と、外乱トルクをゲイン演算値を用いて処理し、補償情報を出力する補償部134と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
車両が備える操作部材の操作に基づき転舵輪を転舵する操舵装置であって、
前記操作部材に接続される操作軸体を回転させて転舵輪を転舵する転舵機構と、
前記転舵機構に油圧転舵力を付与する油圧機構と、
前記操作軸体に第一トルクを付与する第一電動モータと、
前記第一電動モータを制御する制御装置と、を備え、
前記制御装置は、
前記操舵装置が備えるセンサからセンサ情報を取得する情報取得部と、
前記操舵装置に起因して前記操作軸体に発生する軸周りに振動する振動トルク、および路面から前記操作軸体に作用する軸周りの第二トルクを含む外乱トルクを前記センサ情報の少なくとも一部に基づき推定する外乱トルク推定部と、
前記センサ情報に応じて前記外乱トルクを処理するゲイン演算値を出力する操舵状態検出部と、
前記外乱トルクを前記ゲイン演算値を用いて処理し、補償情報を出力する補償部と、を備える
操舵装置。
続きを表示(約 700 文字)
【請求項2】
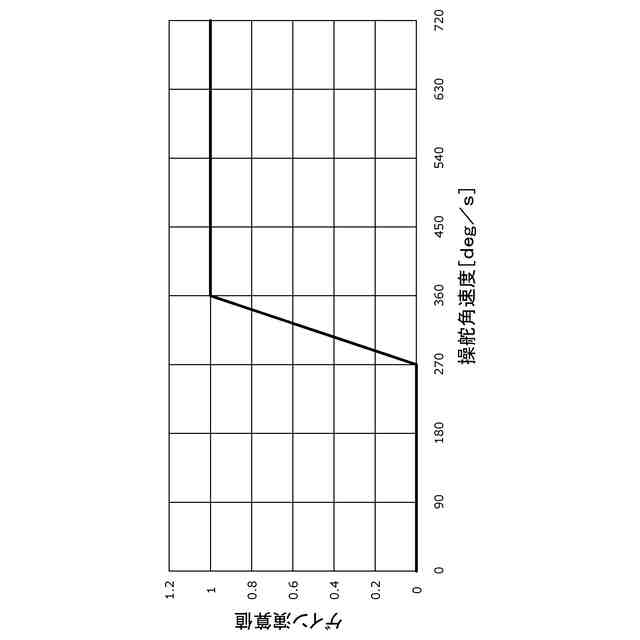
前記センサ情報は、操舵角速度を示す角速度情報を含み、
前記操舵状態検出部は、
前記角速度情報に応じたゲイン演算値を出力し、
前記補償部は、
前記外乱トルクに前記ゲイン演算値をかけ合わせた結果を補償情報として出力する
請求項1に記載の操舵装置。
【請求項3】
前記センサ情報は、操舵角を示す操舵角情報を含み、
前記操舵状態検出部は、
前記操舵角情報が所定の操舵角条件を満たした場合にのみ前記角速度情報に応じたゲイン演算値を出力する
請求項2に記載の操舵装置。
【請求項4】
前記油圧機構は、
オイルポンプと、
前記オイルポンプを駆動させる第二電動モータと、を備え、
前記センサ情報は、前記第二電動モータの回転数を示すモータ回転数情報を含み、
前記操舵状態検出部は、
前記モータ回転数情報に応じたゲイン演算値を出力し、
前記補償部は、
前記外乱トルクに前記ゲイン演算値をかけ合わせた結果を補償情報として出力する
請求項1または2に記載の操舵装置。
【請求項5】
前記情報取得部は、
前記車両が備えるエンジンの回転数を示すエンジン回転数情報を取得し、
前記操舵状態検出部は、
前記エンジン回転数情報に応じたゲイン演算値を出力し、
前記補償部は、
前記外乱トルクに前記ゲイン演算値をかけ合わせた結果を補償情報として出力する
請求項1または2に記載の操舵装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動アクチュエータ、および油圧アクチュエータによりアシスト力が付与される操舵装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
電動アクチュエータ、および油圧アクチュエータによりアシスト力が付与されるステアリング装置が存在している。例えば特許文献1には、電動アクチュエータが担うアシストトルクと油圧アクチュエータが担うアシスト力とを車速に応じた比率で分配するステアリング装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-213094号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、油圧アクチュエータを備える油圧機構に起因する振動がアシストトルクに加わる場合がある。このトルクの振動により、操舵者は、不快感、操舵疲労を感じる。一方で、従来通りオブザーバによる外乱推定により振動検出して振動を抑制する場合、操舵者に必要な路面からの情報(ロードインフォメーション)まで消してしまうという背反がある。
【0005】
本発明は、上記課題に鑑みなされたものであり、操舵者が操舵時に感じる不快感、操舵疲労を低減し、かつ操舵者にロードインフォメーションを感じさせることができる操舵装置の提供を目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の1つである操舵装置は、車両が備える操作部材の操作に基づき転舵輪を転舵する操舵装置であって、前記操作部材に接続される操作軸体を回転させて転舵輪を転舵する転舵機構と、前記転舵機構に油圧転舵力を付与する油圧機構と、前記操作軸体に第一トルクを付与する第一電動モータと、前記第一電動モータを制御する制御装置と、を備え、前記制御装置は、前記操舵装置が備えるセンサからセンサ情報を取得する情報取得部と、前記操舵装置に起因して前記操作軸体に発生する軸周りに振動する振動トルク、および路面から前記操作軸体に作用する軸周りの第二トルクを含む外乱トルクを前記センサ情報の少なくとも一部に基づき推定する外乱トルク推定部と、前記センサ情報に応じて前記外乱トルクを処理するゲイン演算値を出力する操舵状態検出部と、前記外乱トルクを、前記ゲイン演算値を用いて処理し、補償情報を出力する補償部と、を備える。
【発明の効果】
【0007】
本発明によれば、操作部材に伝わる振動による操舵者が操舵時に感じる不快感、操舵疲労を低減し、操舵者にロードインフォメーションを感じさせることができる。
【図面の簡単な説明】
【0008】
操舵装置を備えるステアリングシステムを模式的に表す図である。
トルクフィードバック制御の機能構成を示すブロック図である。
操舵角速度とゲイン演算値の関係を示すマップである。
操舵角と判断値の関係を示すマップである。
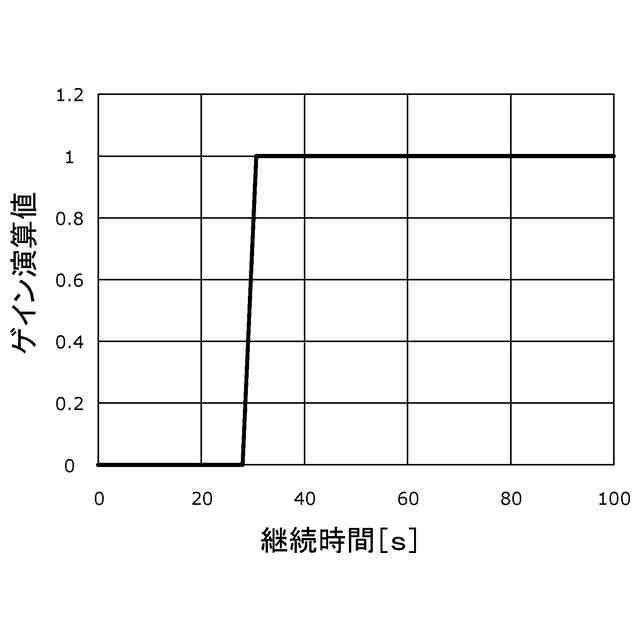
第二電動モータの回転が不安定な状態の継続時間とゲイン演算値の関係を示すマップである。
車両が備えるエンジンの回転数とゲイン演算値の関係を示すマップである。
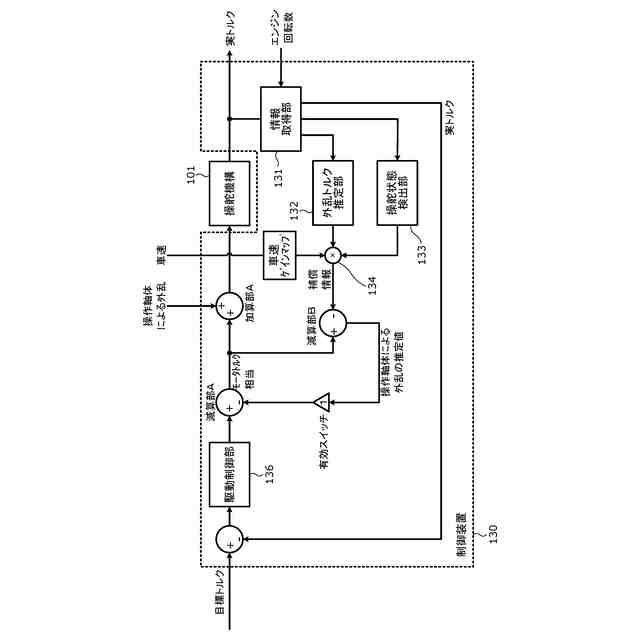
別例のトルクフィードバック制御の機能構成を示すブロック図である。
車速と車速ゲインの関係を示すマップである。
【発明を実施するための形態】
【0009】
以下、本発明に係る操舵装置の実施の形態について、図面を参照しつつ説明する。なお、以下の実施の形態は、本発明を説明するために一例を挙示するものであり、本発明を限定する主旨ではない。例えば、以下の実施の形態において示される形状、構造、材料、構成要素、相対的位置関係、接続状態、数値、数式、方法における各段階の内容、各段階の順序などは、一例であり、以下に記載されていない内容を含む場合がある。また、平行、直交などの幾何学的な表現を用いる場合があるが、これらの表現は、数学的な厳密さを示すものではなく、実質的に許容される誤差、ずれなどが含まれる。また、同時、同一などの表現も、実質的に許容される範囲を含んでいる。
【0010】
また、図面は、本発明を説明するために適宜強調、省略、または比率の調整を行った模式的な図となっており、実際の形状、位置関係、および比率とは異なる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
1か月前
個人
走行装置
2か月前
個人
乗り物
3か月前
個人
電動走行車両
2か月前
個人
電動モビリティ
6か月前
個人
折り畳み自転車
9か月前
個人
発音装置
6か月前
個人
閂式ハンドル錠
2か月前
個人
ボギー・フレーム
14日前
個人
自転車用傘捕捉具
10か月前
個人
自由方向乗車自転車
6か月前
個人
“zen-go.”
1か月前
個人
体重掛けリフト台車
9か月前
個人
ルーフ付きトライク
1か月前
個人
ルーフ付きトライク
6日前
個人
パワーアシスト自転車
15日前
個人
アタッチメント
10か月前
個人
自転車用荷物台
9か月前
個人
キャンピングトライク
7か月前
個人
ステアリングの操向部材
7か月前
株式会社CPM
駐輪機
10か月前
個人
フロントフットブレーキ。
2か月前
株式会社三五
リアサブフレーム
9か月前
株式会社豊田自動織機
産業車両
3か月前
学校法人千葉工業大学
車両
8か月前
学校法人千葉工業大学
車両
8か月前
ダイハツ工業株式会社
車両
11か月前
学校法人千葉工業大学
車両
8か月前
豊田鉄工株式会社
小型車両
1か月前
豊田合成株式会社
操舵装置
10か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
10か月前
個人
ホイールハブ駆動構造
2か月前
ヤマハ発動機株式会社
車両
10か月前
個人
走行車両等の粉塵飛散防止装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ