TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025056406
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165860
出願日
2023-09-27
発明の名称
操舵制御装置及び操舵制御方法
出願人
株式会社ジェイテクト
,
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250401BHJP(鉄道以外の路面車両)
要約
【課題】制御上の安定性の低下を抑えることができる操舵制御装置及び操舵制御方法を提供する。
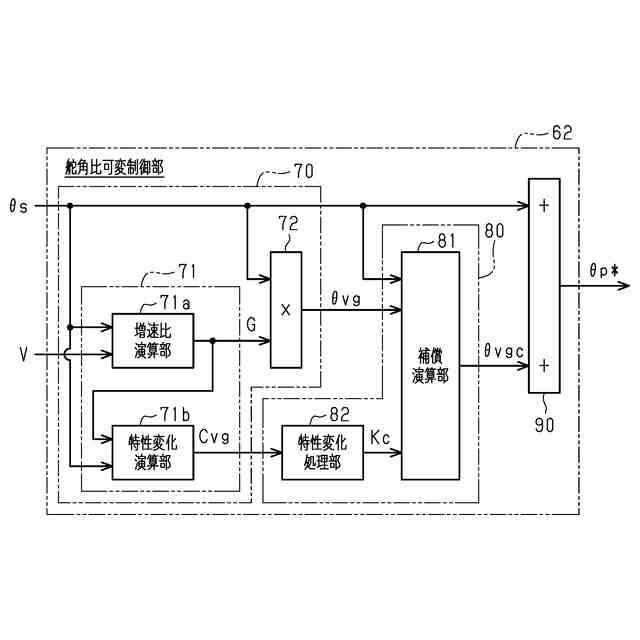
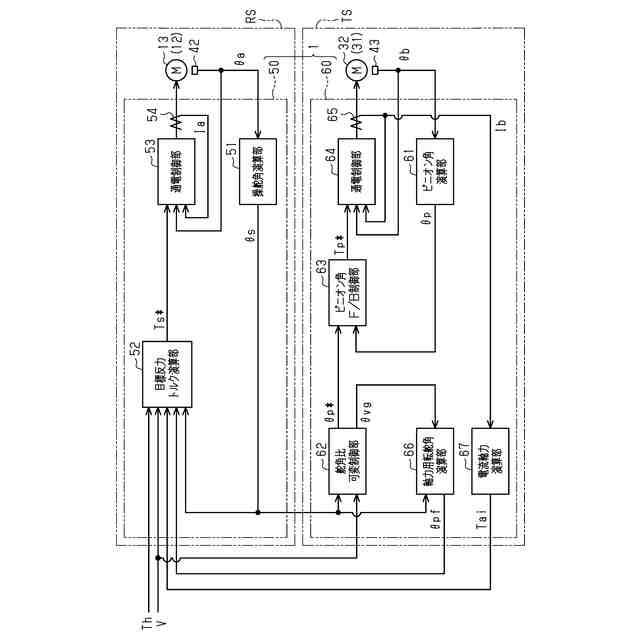
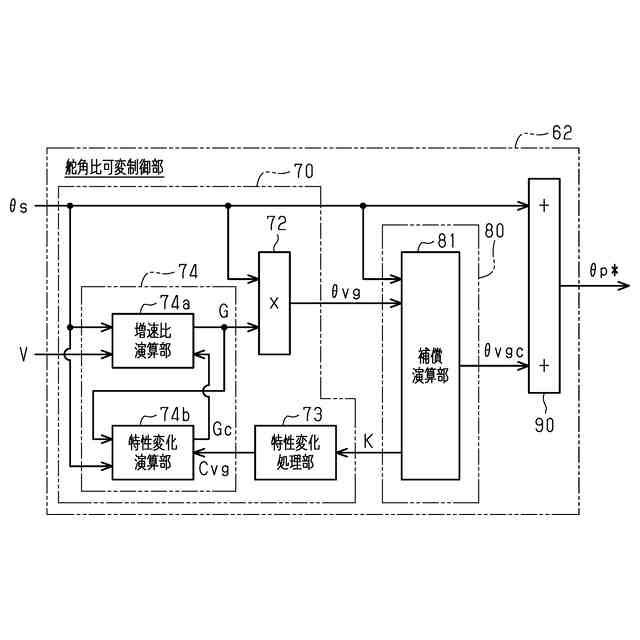
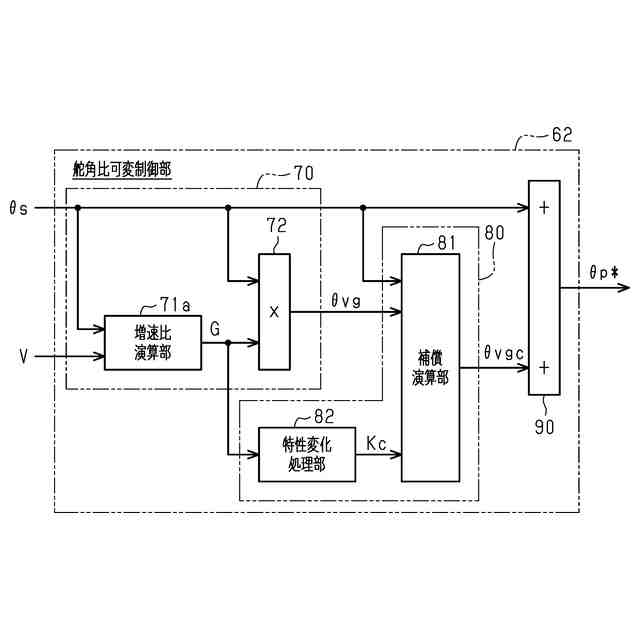
【解決手段】操舵制御装置は、操舵ユニットと転舵ユニットとの間の動力伝達路が分離した構造を有する車両用操舵システムに適用される。転舵制御部は、操舵角θsに基づいて、目標ピニオン角θp*を演算する舵角比可変制御部62を有する。舵角比可変制御部62は、静的成分演算部70と、動的成分演算部80と、反映演算部90とを有する。静的成分演算部70は、操舵角θsを増速比Gに基づき変換して得られる変換成分θvgを演算する処理を含む。動的成分演算部80は、変換成分θvgをフィルタ定数Kに基づく位相補償して得られる補償後成分θvgcを演算する処理を含む。動的成分演算部80は、フィルタ定数Kを、増速比Gに基づいて、車両用操舵システムの制御上の安定性を確保するように変化させるための特性変化処理部82を有する。
【選択図】図4
特許請求の範囲
【請求項1】
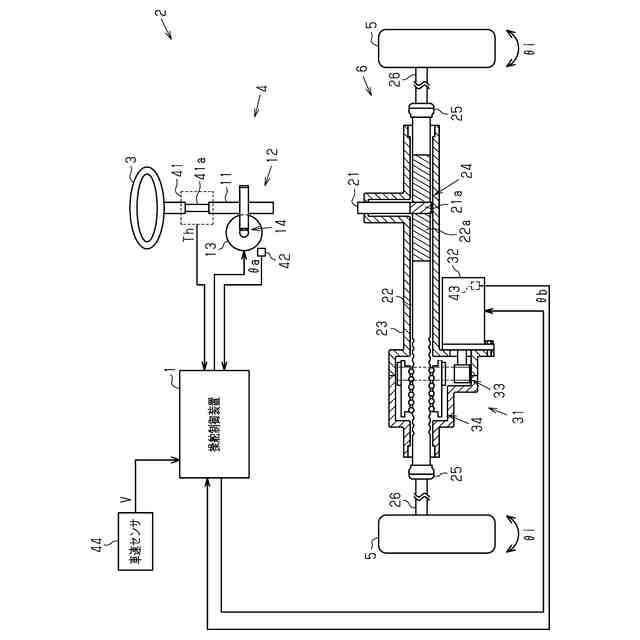
車両のステアリングホイールによって操舵される操舵ユニットと前記車両の転舵輪を転舵させるべく動作する転舵ユニットとの間の動力伝達路が分離した構造を有する車両用操舵システムに適用される操舵制御装置であって、
前記転舵ユニットの動作を制御する制御部を含み、
前記制御部は、前記ステアリングホイールの回転位置である操舵角に基づいて、前記転舵ユニットを動作させるための制御量である、前記転舵輪の転舵位置である転舵角の目標である目標転舵角を演算する目標転舵角演算処理を実行するように構成されており、
前記目標転舵角演算処理は、
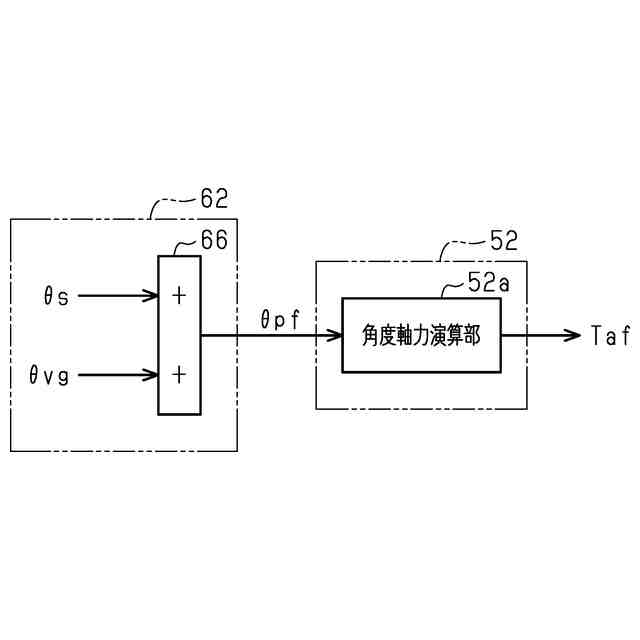
前記操舵角と前記転舵角との関係を変化させるべく、前記操舵角を入力することにより、当該操舵角を変換して得られる変換成分を演算する変換演算処理と、
前記車両の挙動への影響を調整するべく、前記変換成分を入力することにより、当該変換成分を位相補償して得られる補償後成分を演算する補償演算処理と、
前記補償後成分を反映させるように前記目標転舵角を演算する成分反映処理と、を含み、
前記変換演算処理は、前記操舵角と前記変換成分との関係を規定する変換特性に応じた前記変換成分を演算する処理を含み、
前記補償演算処理は、前記変換成分と前記補償後成分との関係を規定する補償特性に応じた前記補償後成分を演算する処理を含み、
前記変換演算処理及び前記補償演算処理の少なくともいずれかの処理は、当該処理における特性を、他方の処理の特性に基づいて、前記車両用操舵システムの制御上の安定性を確保するように変化させるための特性変化処理を含む操舵制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記変換演算処理及び前記補償演算処理のうちの前記補償演算処理は、前記特性変化処理を含み、
前記補償演算処理における前記特性変化処理は、前記補償特性を、前記変換特性に基づき変化させる処理である請求項1に記載の操舵制御装置。
【請求項3】
前記変換演算処理は、前記転舵角についての前記操舵角の変化量に対する変化量の割合を示す舵角可変値を使用して前記操舵角を前記変換成分に変換する処理であり、
前記変換特性は、前記車両及び前記車両用操舵システムの少なくともいずれかの状態変化に応じた前記舵角可変値に基づく特性であり、
前記補償演算処理は、前記変換成分に対して位相遅れ補償を実行する位相遅れフィルタ処理であり、
前記補償特性は、前記位相遅れフィルタ処理の特性である伝達関数の定数を示す値である請求項2に記載の操舵制御装置。
【請求項4】
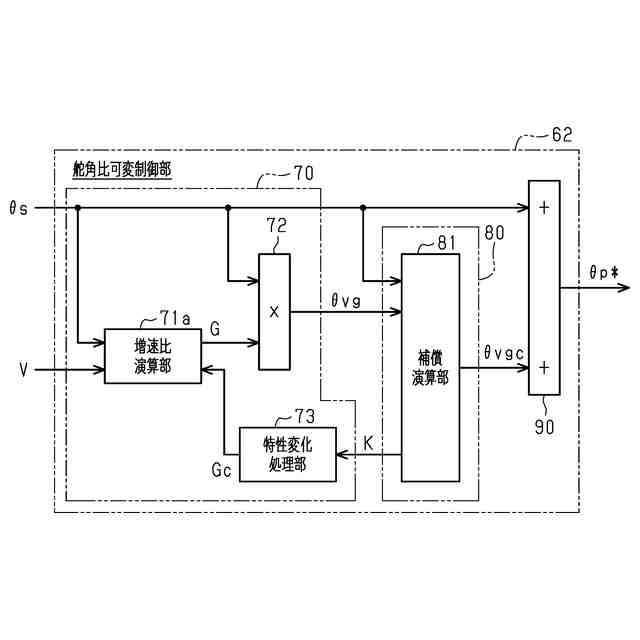
前記変換演算処理及び前記補償演算処理のうちの前記変換演算処理は、前記特性変化処理を含み、
前記変換演算処理における前記特性変化処理は、前記変換特性を、前記補償特性に基づき変化させる処理である請求項1に記載の操舵制御装置。
【請求項5】
前記補償演算処理は、前記変換成分に対して位相遅れ補償を実行する位相遅れフィルタ処理であり、
前記補償特性は、前記車両及び前記車両用操舵システムの少なくともいずれかの状態変化に応じた前記位相遅れフィルタ処理の特性である伝達関数の定数を示す値であり、
前記変換演算処理は、前記転舵角についての前記操舵角の変化量に対する変化量の割合を示す舵角可変値を使用して前記操舵角を前記変換成分に変換する処理であり、
前記変換特性は、前記舵角可変値に基づく特性である請求項4に記載の操舵制御装置。
【請求項6】
前記変換演算処理は、前記操舵角を入力として前記舵角可変値を演算する舵角可変値演算処理を含み、
前記舵角可変値に基づく特性は、前記舵角可変値演算処理に入力される前記操舵角の変化量に対する前記変換成分の変化量又は前記舵角可変値の変化量である請求項3又は請求項5に記載の操舵制御装置。
【請求項7】
車両のステアリングホイールによって操舵される操舵ユニットと前記車両の転舵輪を転舵させるべく動作する転舵ユニットとの間の動力伝達路が分離した構造を有する車両用操舵システムに適用される操舵制御方法であって、
前記操舵制御方法は、前記転舵ユニットの動作を制御する制御処理を実行することを含み、
前記制御処理は、前記ステアリングホイールの回転位置である操舵角に基づいて、前記転舵ユニットを動作させるための制御量である、前記転舵輪の転舵位置である転舵角の目標である目標転舵角を演算する目標転舵角演算処理を含み、
前記目標転舵角演算処理は、
前記操舵角と前記転舵角との関係を変化させるべく、前記操舵角を入力することにより、当該操舵角を変換して得られる変換成分を演算する変換演算処理と、
前記車両の挙動への影響を調整するべく、前記変換成分を入力することにより、当該変換成分を位相補償して得られる補償後成分を演算する補償演算処理と、
前記補償後成分を反映させるように前記目標転舵角を演算する成分反映処理と、を含み、
前記変換演算処理は、前記操舵角と前記変換成分との関係を規定する変換特性に応じた前記変換成分を演算する処理を含み、
前記補償演算処理は、前記変換成分と前記補償後成分との関係を規定する補償特性に応じた前記補償後成分を演算する処理を含み、
前記変換演算処理及び前記補償演算処理の少なくともいずれかの処理は、当該処理における特性を、他方の処理の特性に基づいて、前記車両用操舵システムの制御上の安定性を確保するように変化させるための特性変化処理を含む操舵制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操舵制御装置及び操舵制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、車両に搭載されるステアバイワイヤ式の操舵装置がある。こうしたステアバイワイヤ式の操舵装置では、ステアリングホイールの回転位置である操舵角と、転舵輪の転舵位置である転舵角との関係を自由に変化させることができるメリットがある。ただし、操舵角と転舵角との関係を自由に変化させることは、車両の挙動であるヨーレートの応答特性に影響を与える。こうした影響への対処を可能にする技術として、例えば、特許文献1に記載の操舵制御装置が提案されている。
【0003】
上記特許文献1では、操舵角と転舵角との関係を自由に変化させることによる、車両の挙動であるヨーレートの応答性への影響の対処として、位相補償を施すようにしている。こうした位相補償は、操舵角と転舵角との関係を自由に変化させるように作用する成分を補償する。
【先行技術文献】
【特許文献】
【0004】
特開2023-12120号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、操舵角と転舵角との関係を自由に変化させることによる影響は、車両の挙動であるヨーレートの応答性への影響に限らず、制御上の安定性にも影響を与えることが考えられる。つまり、操舵角と転舵角との関係を自由に変化させる場合において、制御上の安定性の低下を抑えることが望まれている。
【課題を解決するための手段】
【0006】
上記課題を解決し得る操舵制御装置は、車両のステアリングホイールによって操舵される操舵ユニットと前記車両の転舵輪を転舵させるべく動作する転舵ユニットとの間の動力伝達路が分離した構造を有する車両用操舵システムに適用される。前記操舵制御装置は、前記転舵ユニットの動作を制御する制御部を含み、前記制御部は、前記ステアリングホイールの回転位置である操舵角に基づいて、前記転舵ユニットを動作させるための制御量である、前記転舵輪の転舵位置である転舵角の目標である目標転舵角を演算する目標転舵角演算処理を実行するように構成されており、前記目標転舵角演算処理は、前記操舵角と前記転舵角との関係を変化させるべく、前記操舵角を入力することにより、当該操舵角を変換して得られる変換成分を演算する変換演算処理と、前記車両の挙動への影響を調整するべく、前記変換成分を入力することにより、当該変換成分を位相補償して得られる補償後成分を演算する補償演算処理と、前記補償後成分を反映させるように前記目標転舵角を演算する成分反映処理と、を含み、前記変換演算処理は、前記操舵角と前記変換成分との関係を規定する変換特性に応じた前記変換成分を演算する処理を含み、前記補償演算処理は、前記変換成分と前記補償後成分との関係を規定する補償特性に応じた前記補償後成分を演算する処理を含み、前記変換演算処理及び前記補償演算処理の少なくともいずれかの処理は、当該処理における特性を、他方の処理の特性に基づいて、前記車両用操舵システムの制御上の安定性を確保するように変化させるための特性変化処理を含む。
【0007】
上記構成によれば、特性変化処理は、対応する処理における特性を、他方の処理の特性に基づいて、変化させるようにしている。これにより、変換演算処理と補償演算処理とにおいて、車両用操舵システムの制御上の安定性を確保する観点で、互いに処理の特性を関連付けることができる。つまり、操舵角と転舵角との関係を変化させる場合であっても、車両用操舵システムの制御上の安定性を確保することができる。したがって、制御上の安定性の低下を抑えることができる。
【0008】
より詳しくは、上記操舵制御装置において、前記変換演算処理及び前記補償演算処理のうちの前記補償演算処理は、前記特性変化処理を含み、前記補償演算処理における前記特性変化処理は、前記補償特性を、前記変換特性に基づき変化させる処理である。
【0009】
上記構成によれば、操舵角を変化して得られる変換成分をさらに位相補償する場合、補償演算処理における補償特性は、車両用操舵システムの制御上の安定性の低下を抑えるように変化される。これにより、補償演算処理について、特性変化処理を含むようにするのみで、制御上の安定性の低下を好適に抑えることができる。
【0010】
上記操舵制御装置において、前記変換演算処理は、前記転舵角についての前記操舵角の変化量に対する変化量の割合を示す舵角可変値を使用して前記操舵角を前記変換成分に変換する処理であり、前記変換特性は、前記車両及び前記車両用操舵システムの少なくともいずれかの状態変化に応じた前記舵角可変値に基づく特性であり、前記補償演算処理は、前記変換成分に対して位相遅れ補償を実行する位相遅れフィルタ処理であり、前記補償特性は、前記位相遅れフィルタ処理の特性である伝達関数の定数を示す値であることが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発音装置
1か月前
個人
電動モビリティ
1か月前
個人
折り畳み自転車
4か月前
個人
自転車用傘捕捉具
5か月前
個人
体重掛けリフト台車
4か月前
個人
自由方向乗車自転車
1か月前
個人
自転車用荷台
8か月前
個人
アタッチメント
5か月前
個人
キャンピングトライク
2か月前
井関農機株式会社
作業車両
10か月前
個人
自転車用荷物台
5か月前
個人
ステアリングの操向部材
2か月前
株式会社CPM
駐輪機
5か月前
個人
ステアリングの操向部材
8か月前
祖峰企画株式会社
平台車
9か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
7か月前
株式会社三五
リアサブフレーム
4か月前
学校法人千葉工業大学
車両
3か月前
学校法人千葉工業大学
車両
3か月前
ヤマハ発動機株式会社
車両
6か月前
学校法人千葉工業大学
車両
3か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
豊田合成株式会社
操舵装置
6か月前
ダイハツ工業株式会社
車両
6か月前
株式会社オカムラ
搬送用什器
1か月前
株式会社クボタ
作業車
10日前
株式会社クボタ
作業車
9か月前
コンビ株式会社
乳母車
8日前
アルインコ株式会社
運搬台車
10か月前
株式会社カインズ
台車
1か月前
株式会社カインズ
台車
4か月前
株式会社クボタ
作業車
9か月前
アルインコ株式会社
運搬台車
10か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ