TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025048756
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2024144020
出願日
2024-08-26
発明の名称
コンピュータ実装方法、コンピュータシステム、コンピュータプログラム(ドローンの小荷物送達の行列ベースの安全性判定)
出願人
インターナショナル・ビジネス・マシーンズ・コーポレーション
,
INTERNATIONAL BUSINESS MACHINES CORPORATION
代理人
個人
,
個人
,
弁理士法人RYUKA国際特許事務所
主分類
G08G
5/00 20250101AFI20250326BHJP(信号)
要約
【課題】コンピュータ実装方法、コンピュータシステム、及びコンピュータプログラム製品が提供される。
【解決手段】第1コンピュータは、ドローンの飛行のための目的地場所を示すメッセージを受信する。前記第1コンピュータは、前記ドローンの飛行のための出発場所から前記目的地場所へのルートの第1推奨を生成する。前記生成する段階は、前記出発場所及び前記目的地場所を含む地理的エリアを表す第1安全行列に依存する段階を含む。前記第1安全行列は、数字の行及び列を含む。各数字は、前記地理的エリアを示すマップのそれぞれの部分に対する第1安全ファクタを表す。前記生成する段階は、前記出発場所及び前記目的地場所の間の直行ルートに関する第1分析に依存する段階も含む。前記第1分析は、前記直行ルートを表す部分に沿って前記第1安全行列の値を分析することを含む。
【選択図】図1
特許請求の範囲
【請求項1】
第1コンピュータを介して、ドローンの飛行のための目的地場所を示すメッセージを受信する段階;及び
前記第1コンピュータを介して、前記ドローンの飛行のための出発場所から前記目的地場所へのルートの第1推奨を生成する段階
を備え、ここで、前記生成する段階は:
前記出発場所及び前記目的地場所を含む地理的エリアを表す第1安全行列に依存する段階、ここで、前記第1安全行列は、数字の行及び列を含み、各数字は、前記地理的エリアを示すマップのそれぞれの部分に対する第1安全ファクタを表す;及び
前記出発場所及び前記目的地場所の間の直行ルートに関する第1分析に依存する段階、ここで、前記第1分析は、前記直行ルートを表す部分に沿って前記第1安全行列の値を分析する段階を含む
を有する、コンピュータ実装方法。
続きを表示(約 1,000 文字)
【請求項2】
前記直行ルートが閾値を超える安全上のリスクを有することを示す前記第1分析に応答して、代替ルートを表す追加部分にそれぞれ沿って前記第1安全行列の値のそれぞれの合計を使用する代替ルート比較に依存する段階;及び
前記代替ルート比較に基づいて前記代替ルートから前記第1推奨を選択する段階
をさらに備える、請求項1に記載のコンピュータ実装方法。
【請求項3】
前記代替ルート比較は、前記第1安全行列に登坂アルゴリズムを適用することを有する、請求項2に記載のコンピュータ実装方法。
【請求項4】
前記代替ルート比較は、それぞれの前記代替ルートがそれぞれの行列値の行列位置に対応するマップのサブ領域を通過するそれぞれの長さに基づいて、前記それぞれの行列値を重み付ける、請求項2に記載のコンピュータ実装方法。
【請求項5】
前記第1安全行列は、前記地理的エリア内の前記地理的エリア又は道路における鳥の存在に基づく、請求項1に記載のコンピュータ実装方法。
【請求項6】
前記第1安全行列は、1又は複数の衛星を介して実行される鳥の感知に基づく、請求項5に記載のコンピュータ実装方法。
【請求項7】
前記第1安全行列は、道路及び前記道路に沿った交通状況に基づく、請求項5に記載のコンピュータ実装方法。
【請求項8】
前記地理的エリアを表す組み合わされた安全行列に依存する段階、ここで、前記組み合わされた安全行列は、前記第1安全行列及び第2安全行列を組み合わせることによって形成され、前記第2安全行列は、数字の行及び列を含み、各数字は、前記マップの前記それぞれの部分の第2安全ファクタを表し、前記第2安全ファクタは、前記第1安全ファクタとは異なる;
をさらに備え、
ここで、前記第1分析は、前記直行ルートを表す前記部分に沿った前記組み合わされた安全行列の値を分析することを含む
請求項1に記載のコンピュータ実装方法。
【請求項9】
前記組み合わせることは、前記マップの各それぞれの部分の前記第1安全行列の対応する位置における値に、前記第2安全行列の前記値を追加する、請求項8に記載のコンピュータ実装方法。
【請求項10】
前記第1安全行列は、前記地理的エリアにおける鳥の存在に基づき、前記第2安全行列は、前記地理的エリアにおける道路に基づく、請求項8に記載のコンピュータ実装方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は一般的に、航空ドローン、ドローンを介して実行される小荷物送達、自動化されたマップ生成、及び自動化された環境感知の分野に関連する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
航空ドローンは一般的に、無人航空機であり、場合によっては、無人空中輸送体と称され得る。航空ドローンは、機上の人間のパイロットなしで操縦及び飛行可能である。航空ドローンは、ドローンが自律的に動作するように、機上のコンピュータ及び予めプログラミングされた命令を使用して制御され得る。航空ドローンは、代替的に又はさらに、ドローンを制御するが、ドローンからは遠隔に位置した人によって操縦される遠隔操縦航空機であり得る。マップ及び環境の感知を使用して、ドローンが小荷物送達便などの飛行を実行するための空中ルートを生成するのに役立つ。消費者の物品は、最近ではドローン送達を介して送達されている。
【発明の概要】
【発明が解決しようとする課題】
【0003】
ドローンの飛行のためのより安全なルートを自動的に識別することによってドローン及びパッケージの送達安全性を強化させる。
【課題を解決するための手段】
【0004】
コンピュータ実装方法が実装される。第1コンピュータは、ドローンの飛行のための目的地場所を示すメッセージを受信する。前記第1コンピュータは、前記ドローンの飛行のための出発場所から前記目的地場所へのルートの第1推奨を生成する。前記生成する段階は、前記出発場所及び前記目的地場所を含む地理的エリアを表す第1安全行列に依存する段階を含む。前記第1安全行列は、数字の行及び列を含む。各数字は、前記地理的エリアを示すマップのそれぞれの部分に対する第1安全ファクタを表す。前記生成する段階は、前記出発場所及び前記目的地場所の間の直行ルートに関する第1分析に依存す段階も含む。前記第1分析は、前記直行ルートを表す部分に沿って前記第1安全行列の値を分析することを含む。この方法に対応するコンピュータシステム及びコンピュータプログラム製品も、本明細書に提供されている。
【図面の簡単な説明】
【0005】
本発明のこれらの及び他の目的、特徴及び利点は、添付図面に関連して読まれる、その例示的な実施形態の以下の詳細な説明から明らかになるであろう。例示は、当業者が詳細な説明と併せて本発明を理解することを容易にするにあたっての明確性のためのものであり、図面の様々な特徴は、縮尺通りではない。図面において以下の内容が示されている。
【0006】
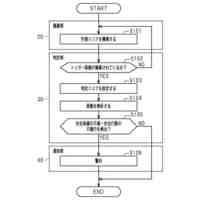
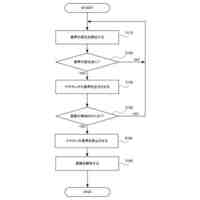
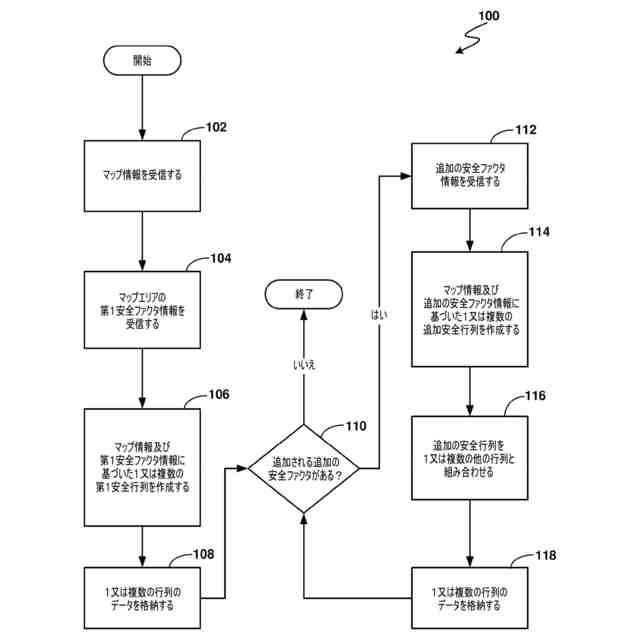
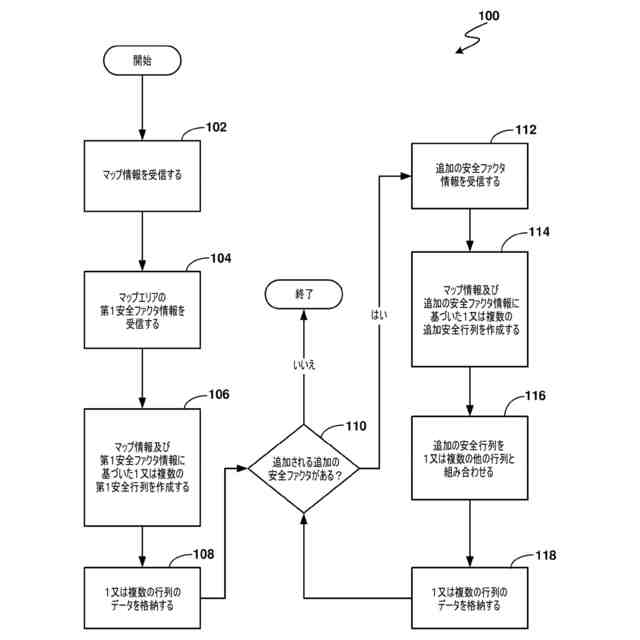
少なくとも1つの実施形態に係る安全条件のためにマップ対行列の調整を実行するプロセスを示す動作フローチャートである。
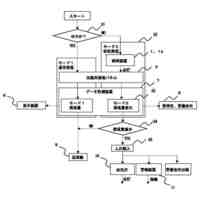
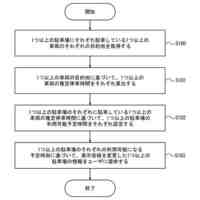
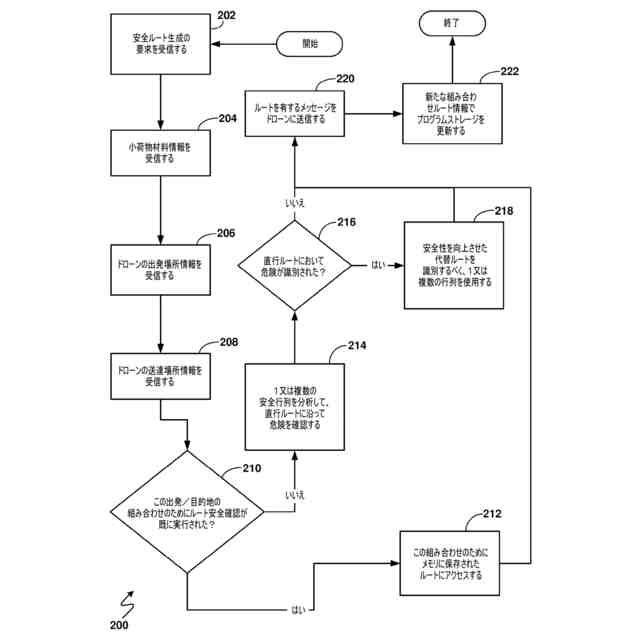
図1に示されたプロセスに従って生成された1又は複数の行列を使用してドローンのルートを生成するためのプロセスを示す少なくとも1つの実施形態に係る動作フローチャートである。
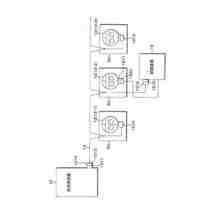
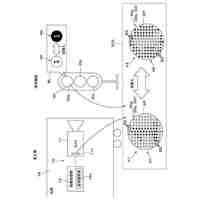
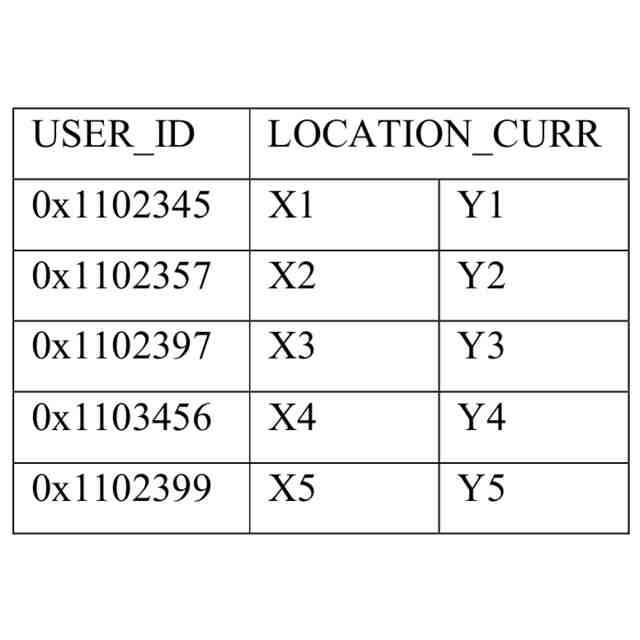
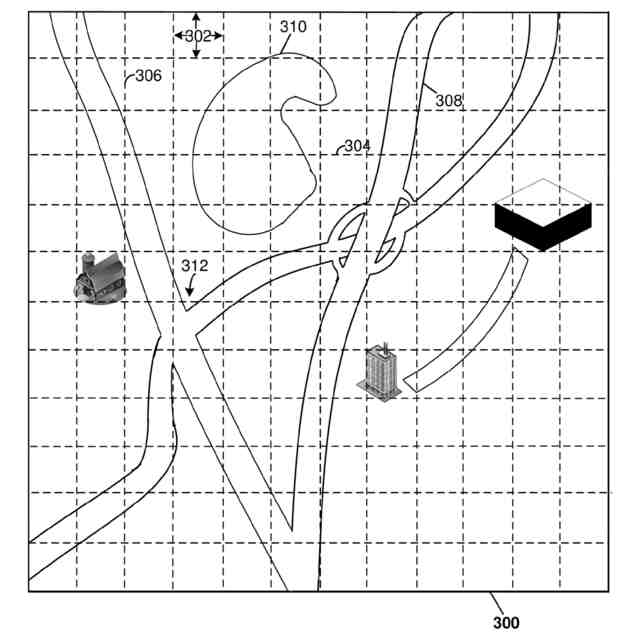
少なくとも1つの実施形態に係る図1及び図2のプロセスに伴い得る緯度及び経度グリッドマップを示す。
【0007】
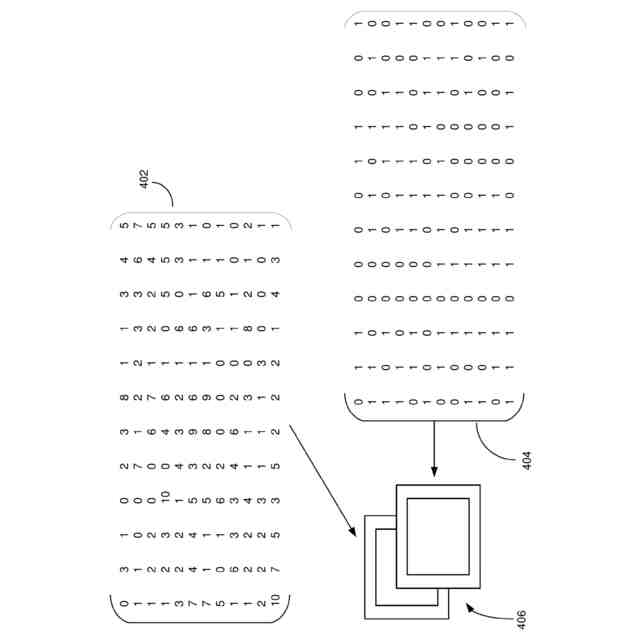
図1のプロセスにおいて生成されて図2のプロセスにおいて使用され得る少なくとも1つの実施形態に係る、互いに組み合わされた少なくとも1つの実施形態に係る安全行列を示す。
【0008】
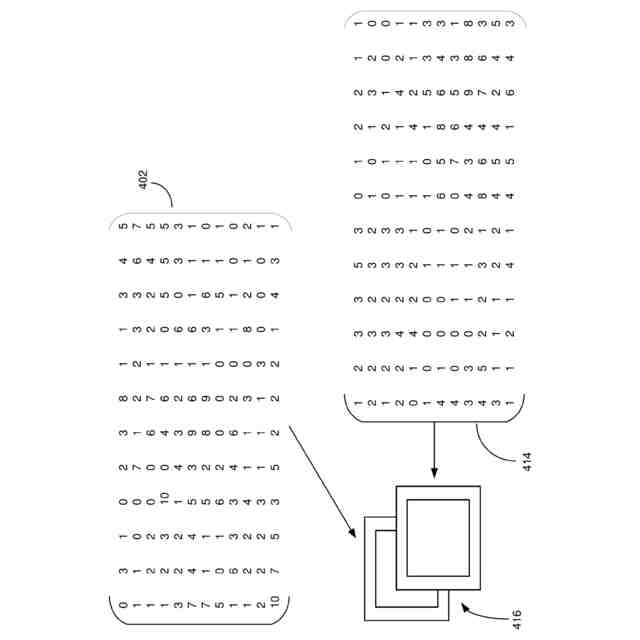
図1のプロセスにおいて生成されて図2のプロセスにおいて使用され得る少なくとも1つの実施形態に係る、互いに組み合わされた少なくとも1つの実施形態に係る安全行列の別のセットを示す。
【0009】
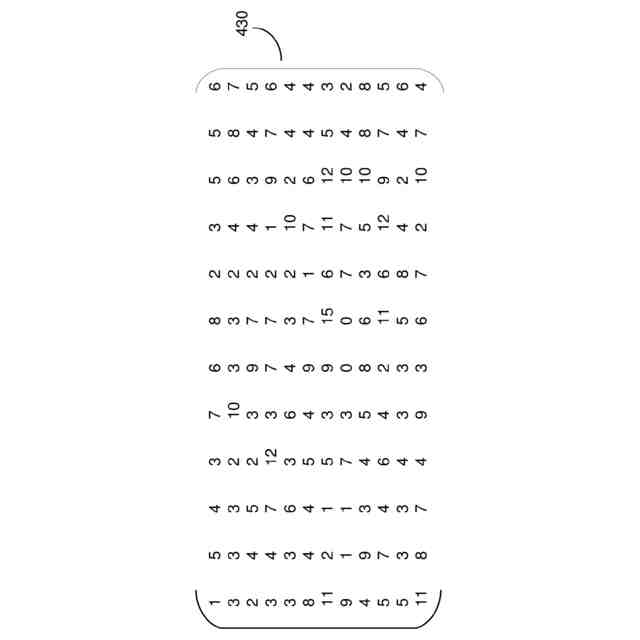
図4Bに示された2つの安全行列の組み合わせを介して生成され得る少なくとも1つの実施形態に係る出力安全行列を示す。
【0010】
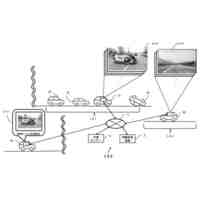
行列の組み合わせ及び分析を実装する実施形態を示し、危険地域を示すピークを有するテンソルを示す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
黄色点滅式信号機
1か月前
個人
空飛ぶ自動車の空路
1か月前
個人
出会い頭事故防止装置
16日前
個人
忘れ物検出装置
19日前
個人
万引き防止システム
1か月前
株式会社ニカデン
検出装置
2か月前
ABT合同会社
詐欺防止装置
1か月前
株式会社国際電気
防災システム
2か月前
日本信号株式会社
運行管理システム
1か月前
株式会社島津製作所
警報装置
23日前
日本信号株式会社
情報管理システム
16日前
ホーチキ株式会社
防災システム
1か月前
ホーチキ株式会社
監視システム
4日前
株式会社SUBARU
車速制御システム
19日前
タック株式会社
安全監視システム
2日前
株式会社SUBARU
危険報知システム
1か月前
合同会社ORIC-LAB
太陽光発電管理装置
25日前
株式会社JVCケンウッド
通知システム
2日前
本田技研工業株式会社
路面評価装置
24日前
株式会社豊田自動織機
運行表示装置
2か月前
日本信号株式会社
路側装置及びセンサ装置
5日前
本田技研工業株式会社
路面評価装置
24日前
株式会社デンソー
運転支援装置
10日前
日本信号株式会社
信号システム及び信号灯器
2か月前
河村電器産業株式会社
警報装置
18日前
株式会社知財事業研究所
運行計画作成システム
24日前
株式会社JR西日本テクシア
接触防止システム
2か月前
トヨタ自動車株式会社
方法
9日前
株式会社小糸製作所
情報提供装置及び制御装置
1か月前
株式会社 ミックウェア
情報処理装置、情報処理方法
16日前
株式会社京三製作所
交通信号制御システム
2か月前
トヨタ自動車株式会社
車両の情報処理装置
1か月前
エムケー精工株式会社
信号機および信号機の発光制御方法
10日前
日本宅配システム株式會社
入館管理システム
1か月前
本田技研工業株式会社
運転支援システム
24日前
トヨタ自動車株式会社
システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ