TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025034854
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141512
出願日
2023-08-31
発明の名称
運転支援システム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250306BHJP(信号)
要約
【課題】路肩を走行可能な自動二輪車のライダに対し、後続車両の存在を適切な強度で報知することができる運転支援システムを提供すること。
【解決手段】運転支援システム1は、自動二輪車である自車両の周囲の状態に関する周囲情報を取得する周囲情報取得部81と、周囲情報に基づいて、自車両の後側方に定められた報知領域内に存在する後続車両を報知対象として認識する報知対象認識部85と、報知対象が認識された場合、報知対象の存在を自車両のライダに報知する第1報知制御を行う報知制御部86と、周囲情報に基づいて、報知対象が認識されている間における自車両による進路変更の実行を予測する進路変更予測部87と、を備える。報知制御部86は、第1報知制御を行っている間に進路変更予測部87により進路変更の実行が予測された場合、第1報知制御よりも報知強度が高い第2報知制御を行う。
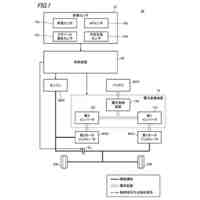
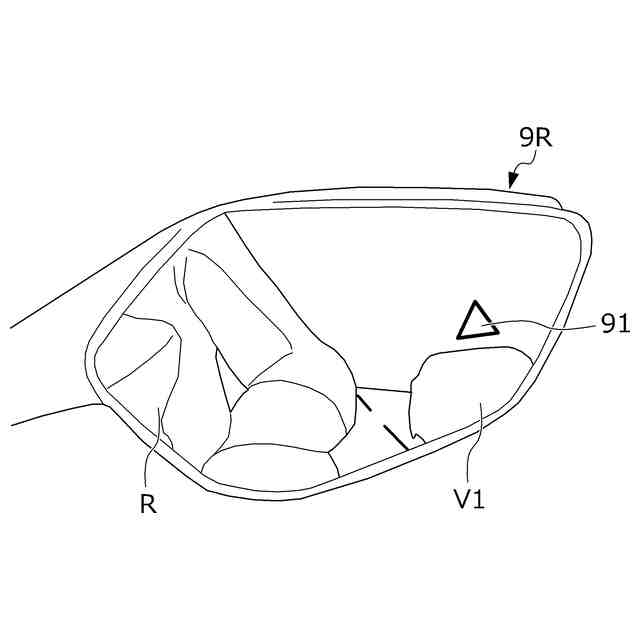
【選択図】図1
特許請求の範囲
【請求項1】
自車両の周囲の状態に関する周囲情報を取得する周囲情報取得手段と、
前記周囲情報に基づいて、前記自車両の後側方に定められた報知領域内に存在する他車両を報知対象として認識する報知対象認識手段と、
前記報知対象が認識された場合、前記報知対象の存在を前記自車両の乗員に報知する第1報知制御を行う報知制御手段と、を備える運転支援システムであって、
前記周囲情報に基づいて、前記報知対象が認識されている間における前記自車両による進路変更の実行を予測する進路変更予測手段をさらに備え、
前記報知制御手段は、前記第1報知制御を行っている間に前記進路変更予測手段により前記進路変更の実行が予測された場合、前記第1報知制御よりも報知強度が高い第2報知制御を行うことを特徴とする運転支援システム。
続きを表示(約 2,000 文字)
【請求項2】
前記進路変更予測手段は、前記周囲情報に基づいて、前記自車両の幅方向に沿った移動を惹き起こす移動惹起要因の存在を前記自車両の進行方向前方に認識した場合、前記進路変更の実行を予測することを特徴とする請求項1に記載の運転支援システム。
【請求項3】
前記自車両が走行する道路を幅方向端から所定幅内の路肩領域と当該路肩領域と隣接する通常走行領域とに区画するとともに、当該道路における前記自車両の走行位置を特定する走行位置特定手段をさらに備え、
前記進路変更予測手段は、前記走行位置が前記路肩領域でありかつ前記自車両の進行方向前方に前記移動惹起要因としての障害物が存在すると認識した場合、前記自車両は前記路肩領域から前記通常走行領域へ進路を変更すると予測することを特徴とする請求項2に記載の運転支援システム。
【請求項4】
前記自車両が走行する道路を幅方向端から所定幅内の路肩領域と当該路肩領域と隣接する通常走行領域とに区画するとともに、当該道路における前記自車両の走行位置を特定する走行位置特定手段と、
前記自車両の進行方向前方に前走車両が存在する場合、前記自車両が前記前走車両に接触するリスクが高くなるほど小さくなるリスク指標を前記周囲情報に基づいて算出するリスク指標算出手段と、をさらに備え、
前記進路変更予測手段は、前記走行位置が前記通常走行領域であり、前記自車両の進行方向前方に前記移動惹起要因としての前記前走車両が存在し、かつ前記前走車両に対する前記リスク指標が所定の閾値以下である場合、前記進路変更の実行を予測することを特徴とする請求項2に記載の運転支援システム。
【請求項5】
前記自車両が走行する道路を幅方向端から所定幅内の路肩領域と当該路肩領域と隣接する通常走行領域とに区画するとともに、当該道路における前記自車両の走行位置を特定する走行位置特定手段をさらに備え、
前記進路変更予測手段は、前記走行位置が前記通常走行領域であり、前記自車両の進行方向前方に前記移動惹起要因としての前走車両及び信号機が存在し、かつ前記信号機の表示態様が進入禁止又は停止を意味するものである場合、前記進路変更の実行を予測することを特徴とする請求項2に記載の運転支援システム。
【請求項6】
前記自車両が走行する道路を幅方向端から所定幅内の路肩領域と当該路肩領域と隣接する通常走行領域とに区画するとともに、当該道路における前記自車両の走行位置を特定する走行位置特定手段をさらに備え、
前記進路変更予測手段は、前記走行位置が前記通常走行領域であり、前記自車両の進行方向前方に前記移動惹起要因としての前走車両が存在し、かつ前記前走車両においてブレーキランプが点灯している場合、前記進路変更の実行を予測することを特徴とする請求項2に記載の運転支援システム。
【請求項7】
前記自車両が走行する道路を幅方向端から所定幅内の路肩領域と当該路肩領域と隣接する通常走行領域とに区画するとともに、当該道路における前記自車両の走行位置を特定する走行位置特定手段をさらに備え、
前記進路変更予測手段は、前記走行位置が前記通常走行領域であり、前記自車両の進行方向前方に前記移動惹起要因としての前走車両が存在し、かつ前記前走車両において方向指示器が点灯している場合、前記進路変更の実行を予測することを特徴とする請求項2に記載の運転支援システム。
【請求項8】
前記報知対象認識手段は、前記通常走行領域に2以上の車線が区画されている場合、前記走行位置に応じて前記報知領域の幅方向に沿った長さを変更することを特徴とする請求項3から7の何れかに記載の運転支援システム。
【請求項9】
前記報知対象認識手段は、前記走行位置が前記路肩領域である場合、又は前記走行位置が各車線の車線端である場合、前記走行位置が各車線の中央である場合よりも、前記報知領域の幅方向に沿った長さを短くすることを特徴とする請求項8に記載の運転支援システム。
【請求項10】
前記自車両が走行する道路を幅方向端から所定幅内の路肩領域と当該路肩領域と隣接する通常走行領域とに区画するとともに、当該道路における前記自車両の走行位置を特定する走行位置特定手段をさらに備え、
前記進路変更予測手段は、前記自車両が前記通常走行領域内でありかつ前記路肩領域と前記通常走行領域とを区画する線から所定距離内を所定時間以上継続して走行する場合、前記自車両は前記通常走行領域から前記路肩領域へ進路を変更しないと予測することを特徴とする請求項2に記載の運転支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援システムに関する。より詳しくは、自車両の後側方における他車両の存在を乗員に報知する機能を備える運転支援システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて様々な運転支援機能に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。
【0003】
特許文献1に記載の車両制御装置は、カメラやレーダ等で取得した情報に基づいて、自車両の後側方に定められた所定領域内に他車両が存在することを認識した場合、ドアミラーの鏡面の一部に所定の画像を表示することにより、乗員に対し自車両に接近する他車両の認識を促すことができる。このような運転支援機能は、BSI(Blind Spot Information)機能とも呼称されている。
【0004】
また近年では、報知を二段階に分けて行うBSI機能も知られている。この場合、初めに自車両の後側方に接近する他車両が認識された場合に弱い報知を行った後、自車両の乗員が方向指示器を操作することによって車線変更をする意思を示した場合に強い報知を行う。これにより乗員は、後側方から接近する他車両の存在を認識しないまま、この他車両側へ車線変更してしまうことを防止することができる。
【先行技術文献】
【特許文献】
【0005】
特開2019-49774号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
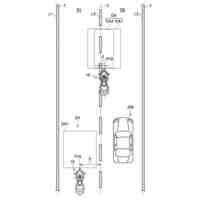
図8は、片側二車線の道路200を走行している自動二輪車である自車両Vが、四輪自動車である前走車両Vaを追い越そうとしている状態を示す図である。また図8には、自車両Vの後側方でありかつ道路200の路肩209を、自動二輪車である後続車両Vbが走行している場合を示す。
【0007】
図8に示すように、自動二輪車(例えば、図8における自車両Vや後続車両Vb等)は四輪自動車(例えば、図8における前走車両Va)と比較して車幅が狭くかつ重量も軽いため、路肩209を走行することが可能である。図8において矢印で示すように、自動二輪車である自車両Vは、前走車両Vaを路肩209から追い越すことが可能である。しかしながら図8に示すような自車両Vの追い越し動作は車線変更ではないため、自車両Vの乗員は方向指示器を操作せずに路肩209側へ進路を変更する場合がある。
【0008】
しかしながら従来のBSI機能では、上述のように方向指示器が操作されることを条件として強い報知を行う。このため図8に示す例では、自車両Vに搭載されたBSI機能によって後続車両Vbが報知対象として認識されている場合であっても、強い報知は行われないので、路肩209を走行する後続車両Vbと路肩209に進入しようとする自車両Vとが接触するおそれがある。
【0009】
本発明は、路肩を走行可能な車両の乗員に対し、後続車両の存在を適切な強度で報知することにより、交通の安全性を向上できる運転支援システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
(1)本発明に係る運転支援システムは、自車両の周囲の状態に関する周囲情報を取得する周囲情報取得手段と、前記周囲情報に基づいて、前記自車両の後側方に定められた報知領域内に存在する他車両を報知対象として認識する報知対象認識手段と、前記報知対象が認識された場合、前記報知対象の存在を前記自車両の乗員に報知する第1報知制御を行う報知制御手段と、前記周囲情報に基づいて、前記報知対象が認識されている間における前記自車両による進路変更の実行を予測する進路変更予測手段と、を備え、前記報知制御手段は、前記第1報知制御を行っている間に前記進路変更予測手段により前記進路変更の実行が予測された場合、前記第1報知制御よりも報知強度が高い第2報知制御を行うことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
17日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
ドア
2日前
本田技研工業株式会社
車両
10日前
本田技研工業株式会社
移動体
11日前
本田技研工業株式会社
電動車両
24日前
本田技研工業株式会社
回転電機
24日前
本田技研工業株式会社
排気装置
24日前
本田技研工業株式会社
吸着装置
17日前
本田技研工業株式会社
触媒構造
24日前
本田技研工業株式会社
排気装置
24日前
本田技研工業株式会社
加工装置
2日前
本田技研工業株式会社
回転電機
20日前
本田技研工業株式会社
全固体電池
2日前
本田技研工業株式会社
車両用灯体
11日前
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
車体前部構造
2日前
本田技研工業株式会社
車体前部構造
2日前
本田技研工業株式会社
鞍乗り型車両
20日前
本田技研工業株式会社
放射冷却装置
10日前
本田技研工業株式会社
コイルユニット
17日前
本田技研工業株式会社
電池モジュール
2日前
本田技研工業株式会社
車両用ドア構造
2日前
本田技研工業株式会社
車両用シール構造
2日前
本田技研工業株式会社
燃料製造システム
20日前
本田技研工業株式会社
鞍乗り型電動車両
17日前
本田技研工業株式会社
車両用前照灯装置
24日前
本田技研工業株式会社
車両用前照灯装置
24日前
本田技研工業株式会社
駆動装置、及び車両
17日前
本田技研工業株式会社
駆動装置、及び車両
17日前
本田技研工業株式会社
二次電池の製造方法
6日前
本田技研工業株式会社
電解質材料の選択方法
2日前
本田技研工業株式会社
チェーンスプロケット
24日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ