TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025060272
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170924
出願日
2023-09-29
発明の名称
車両
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
G08G
1/16 20060101AFI20250403BHJP(信号)
要約
【課題】連続的に車線逸脱を行うような走行時の過剰な発報が抑制された車両を提供する。
【解決手段】車両は、自車両(10)が前回の車線逸脱の警報を発してから今回車線逸脱するまでにかかった時間が所定時間以内である場合には、今回の車線逸脱に対する警報が発っせられないことを特徴とする。
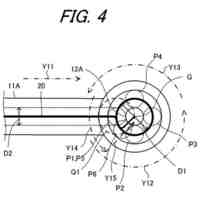
【選択図】図4
特許請求の範囲
【請求項1】
自車両(10)が前回の車線逸脱の警報を発してから今回車線逸脱するまでにかかった時間が所定時間以内である場合には、今回の車線逸脱に対する警報が発っせられない
ことを特徴とする車両。
続きを表示(約 930 文字)
【請求項2】
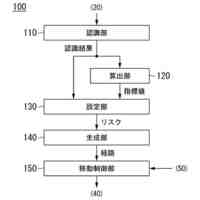
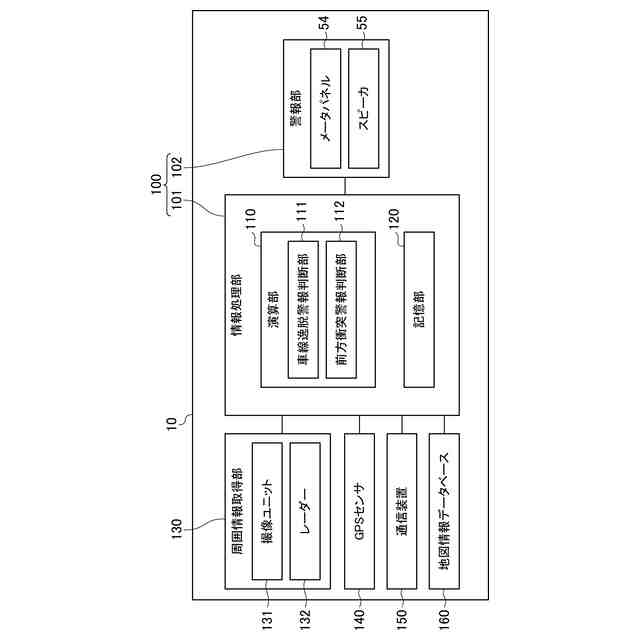
自車両(10)の走行車線(R1、R2)を検出する走行車線検出手段(130)と、
前記自車両(10)に関して車線逸脱警報(AL1)の発報条件が成立した場合に警報を発するか否かを判断する車線逸脱警報判断手段(111)と、
前記車線逸脱警報判断手段(111)の判断結果に基づいて警報を発する警報手段(102)と、を備え、
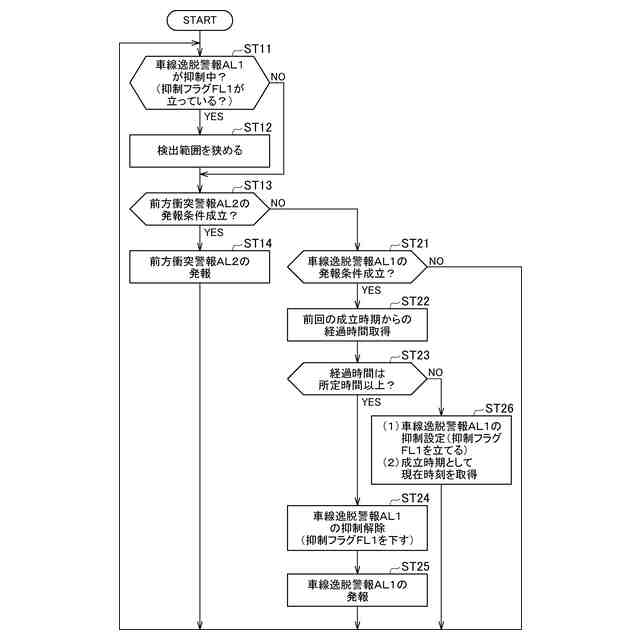
前記警報手段(102)は、前記車線逸脱警報(AL1)の発報条件が成立してから所定時間以内に、再度、前記車線逸脱警報(AL1)の発報条件が成立した場合には、警報を発しない
ことを特徴とする車両。
【請求項3】
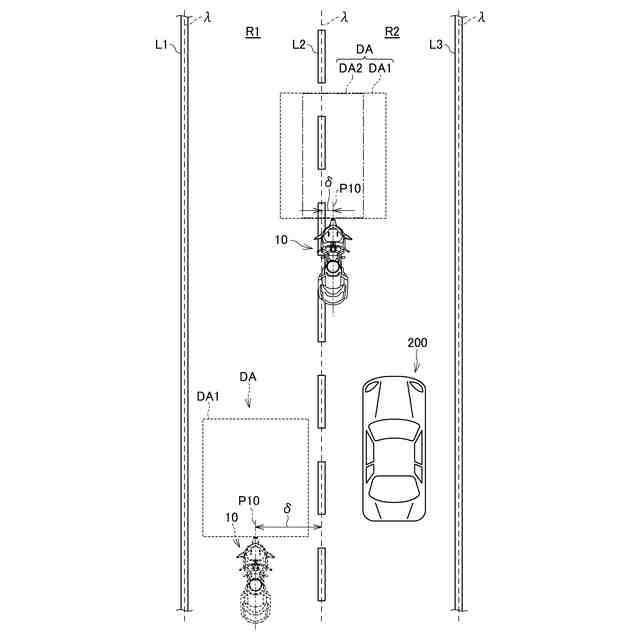
前記自車両(10)の前方の障害物を検出する前方障害物検出手段(130)と、
前記前方障害物検出手段(130)の検出結果に基づいて、予め設定された検出範囲(DA)内に障害物が検出されたか否かを判断する前方衝突警報判断手段(112)と、を備え、
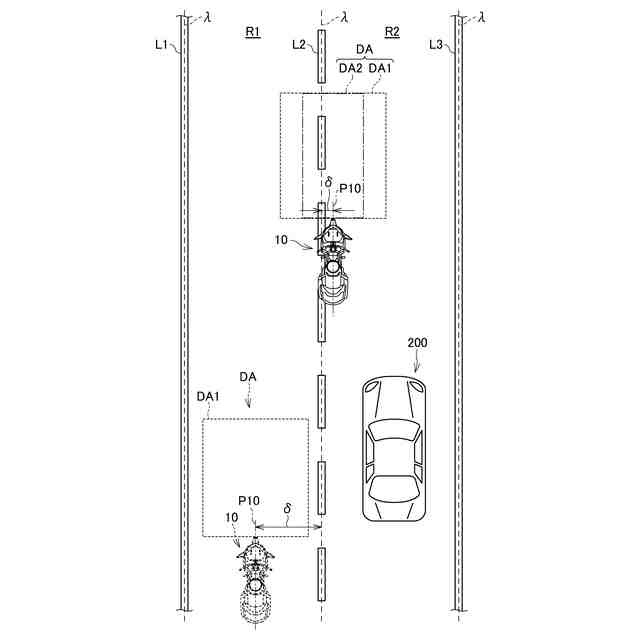
前記車線逸脱警報(AL1)の発報条件が成立してから所定時間以内に、再度、前記車線逸脱警報(AL1)の発報条件が成立した場合には、前記検出範囲(DA)の車幅方向の長さを短くする
ことを特徴とする請求項2記載の車両。
【請求項4】
前記前方衝突警報判断手段(112)が警報を発しないと判断した場合に、前記車線逸脱警報判断手段(111)が警報を発するか否かを判断する
ことを特徴とする請求項3記載の車両。
【請求項5】
自車両(10)の走行車線(R1、R2)を検出する走行車線検出手段(130)と、
前記自車両(10)に関して車線逸脱警報(AL1)の発報条件が成立したか否かを判断する車線逸脱警報判断手段(111)と、
前記車線逸脱警報判断手段(111)の判断結果に基づいて警報を発する警報手段(102)と、を備え、
前記車線逸脱警報(AL1)の発報条件は、少なくとも車線逸脱をしたか否か、および前回の車線逸脱の警報を発してから今回車線逸脱するまでにかかる時間が所定時間を超えるか否か、に基づいてよって決められる
ことを特徴とする車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
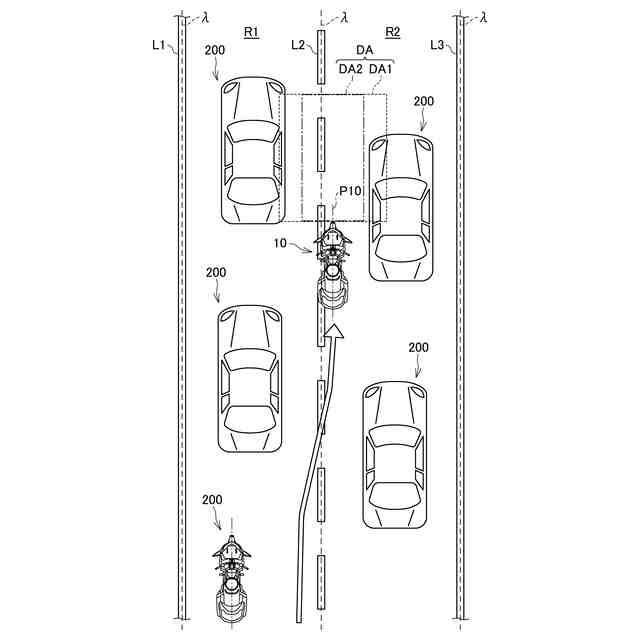
従来、車両の運転支援技術として、車線を逸脱した場合に警報を発する技術が知られている(例えば、特許文献1参照)。特許文献1では、自車両の走行車線に駐車中の他車両が存在する場合や道路工事が行われている場合には、車線を逸脱せざるを得ない場合があることに鑑み、自車両の走行車線が障害物などで実質的に狭くなっている場合に、警報を発するか否かを判断する位置を対向車線側にずらす技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特許第5896505号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、走行環境によっては、ほんの一時的に車線逸脱してすぐ戻ることが連続的に行われる場合があり、必ずしも即警報を必要としない場合がある。
本発明は、上述した事情に鑑みてなされたものであり、連続的に車線逸脱を行うような走行時の過剰な発報が抑制された車両を提供することを目的とする。
【課題を解決するための手段】
【0005】
第1の態様の車両は、自車両が前回の車線逸脱の警報を発してから今回車線逸脱するまでにかかった時間が所定時間以内である場合には、今回の車線逸脱に対する警報が発っせられないことを特徴とする。
第2の態様の車両は、自車両の走行車線を検出する走行車線検出手段と、前記自車両に関して車線逸脱警報の発報条件が成立した場合に警報を発するか否かを判断する車線逸脱警報判断手段と、前記車線逸脱警報判断手段の判断結果に基づいて警報を発する警報手段と、を備え、前記警報手段は、前記車線逸脱警報の発報条件が成立してから所定時間以内に、再度、前記車線逸脱警報の発報条件が成立した場合には、警報を発しないことを特徴とする。
第3の態様の車両は、自車両の走行車線を検出する走行車線検出手段と、前記自車両に関して車線逸脱警報の発報条件が成立したか否かを判断する車線逸脱警報判断手段と、前記車線逸脱警報判断手段の判断結果に基づいて警報を発する警報手段と、を備え、前記車線逸脱警報の発報条件は、少なくとも車線逸脱をしたか否か、および前回の車線逸脱の警報を発してから今回車線逸脱するまでにかかる時間が所定時間を超えるか否か、に基づいてよって決められることを特徴とする。
【発明の効果】
【0006】
連続的に車線逸脱を行うような走行時の過剰な発報が抑制された車両を提供することができる。
【図面の簡単な説明】
【0007】
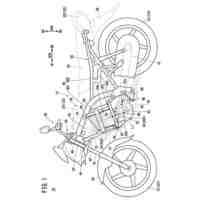
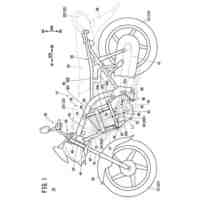
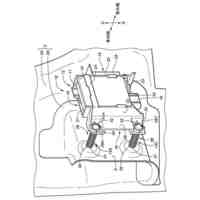
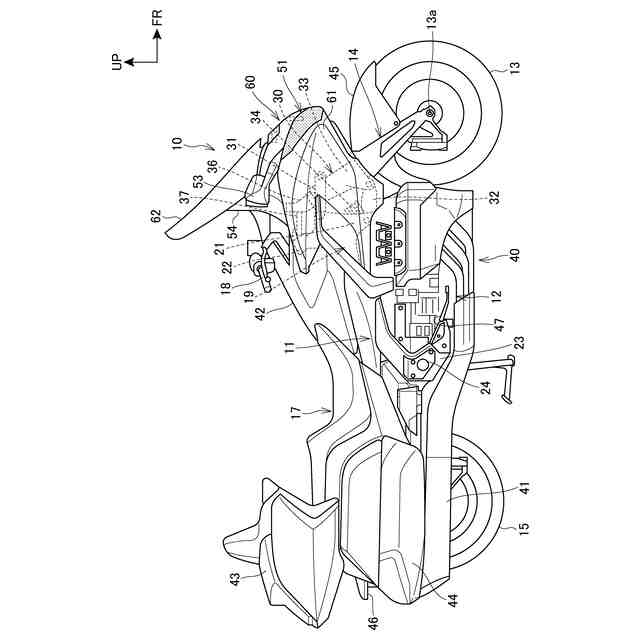
第1の実施の形態に係る鞍乗り型車両の右側面図である。
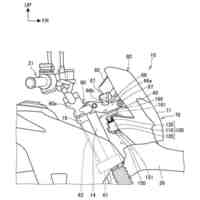
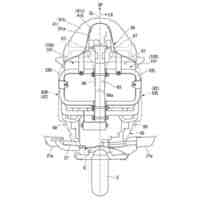
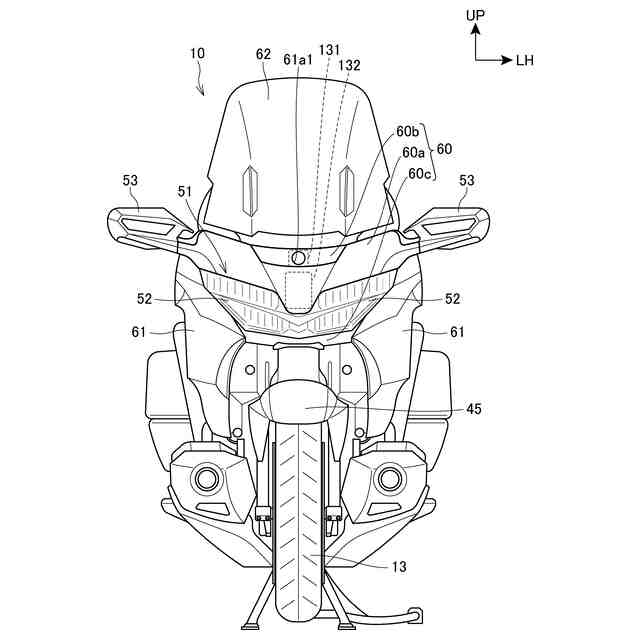
第1の実施の形態に係る鞍乗り型車両の正面図である。
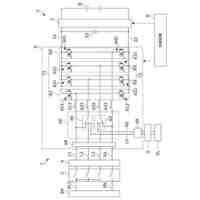
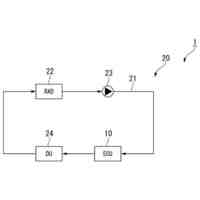
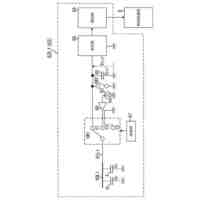
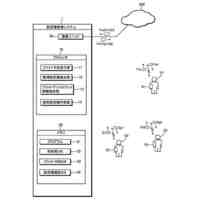
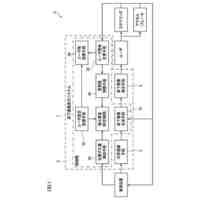
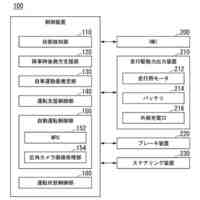
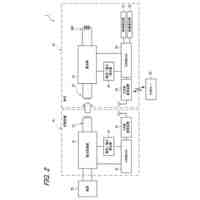
第1の実施の形態に係る鞍乗り型車両の概略構成の一例を示すブロック図である。
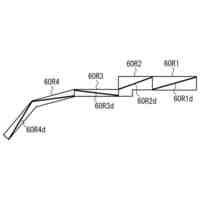
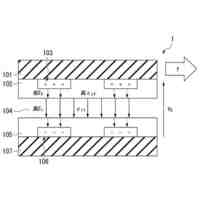
第1の実施の形態に係る車線逸脱警報判断部と前方衝突警報判断部との説明図である。
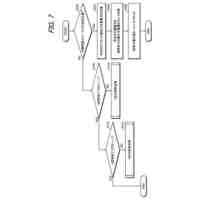
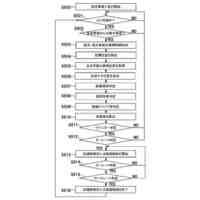
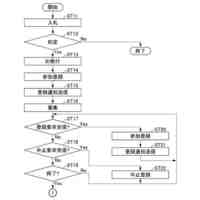
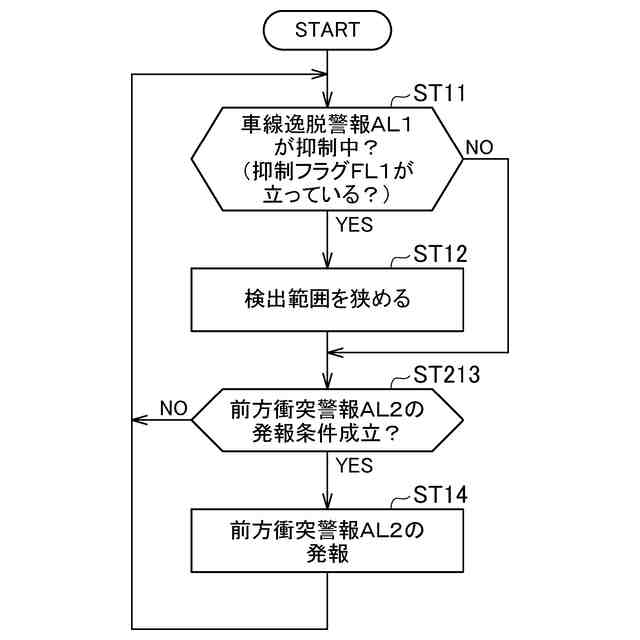
第1の実施の形態に係る走行支援装置の動作の一例を示すフローチャートである。
第1の実施の形態の作用説明図である。
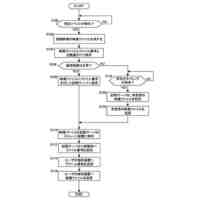
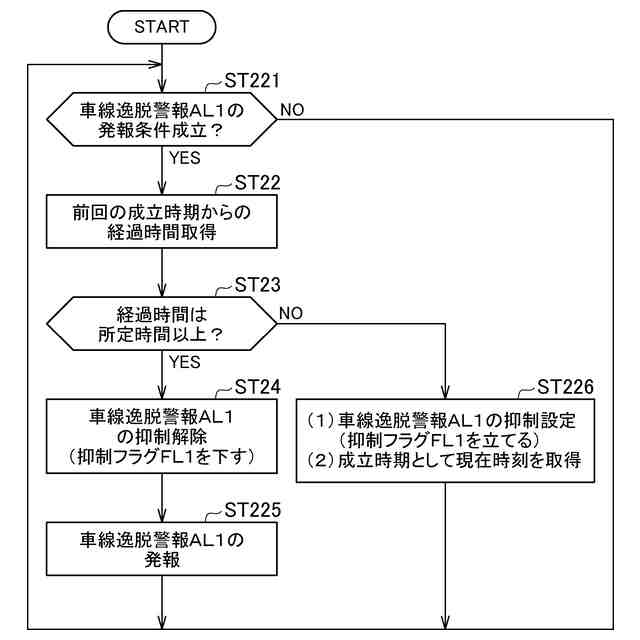
第2の実施の形態に係る走行支援装置の車線逸脱警報判断部による動作を示すフローチャートである。
第2の実施の形態に係る走行支援装置の前方衝突警報判断部による動作を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、図面を参照して本発明の実施の形態について説明する。なお、説明中、前後左右および上下といった方向の記載は、特に記載がなければ車体に対する方向と同一とする。また、各図に示す符号FRは車体前方を示し、符号UPは車体上方を示し、符号LHは車体左方を示す。
【0009】
[第1の実施の形態]
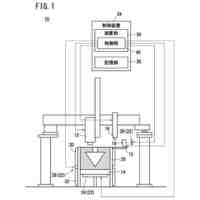
図1は、第1の実施の形態に係る鞍乗り型車両10の右側面図である。
鞍乗り型車両10は、車体フレーム11と、車体フレーム11に支持されるパワーユニット12と、前輪13を操舵自在に支持するフロントフォーク14と、後輪15を支持するリアスイングアーム(不図示)と、乗員用のシート17とを備える自動二輪車である。
鞍乗り型車両10は、乗員がシート17に跨るようにして着座する車両である。シート17は、車体フレーム11の後部の上方に設けられる。
【0010】
車体フレーム11は、前後方向に延設された左右一対のメインフレーム21を有する。メインフレーム21の前端部には、ハンドル18によって回動される操向軸(不図示)を回動自在に支持するヘッドパイプ22が設けられている。メインフレーム21の後端部には、左右一対のピボットプレート23が設けられている。ピボットプレート23の下端部とメインフレーム21の前端部とは、左右一対のロワアーム(不図示)により接続される。メインフレーム21の後端部には、後方へ延びる左右一対のシートレール(不図示)が設けられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
加工装置
1か月前
本田技研工業株式会社
保護部材
23日前
本田技研工業株式会社
内燃機関
17日前
本田技研工業株式会社
電動車両
5日前
本田技研工業株式会社
電動車両
5日前
本田技研工業株式会社
鞍乗り型車両
2日前
本田技研工業株式会社
電源システム
23日前
本田技研工業株式会社
蓄電システム
20日前
本田技研工業株式会社
電源システム
23日前
本田技研工業株式会社
鞍乗り型車両
19日前
本田技研工業株式会社
車両の制御装置
13日前
本田技研工業株式会社
ステアリング装置
3日前
本田技研工業株式会社
ステアリング装置
13日前
本田技研工業株式会社
鞍乗り型電動車両
5日前
本田技研工業株式会社
被遮蔽物視認化装置
4日前
本田技研工業株式会社
航空機管理システム
17日前
本田技研工業株式会社
静電アクチュエータ
13日前
本田技研工業株式会社
物体センサの取付構造
18日前
本田技研工業株式会社
移動サポートシステム
18日前
本田技研工業株式会社
床下画像表示システム
2日前
本田技研工業株式会社
バッテリケース及び車両
9日前
本田技研工業株式会社
押圧装置および押圧システム
6日前
本田技研工業株式会社
駐車制御装置及び駐車制御方法
2日前
本田技研工業株式会社
運転支援装置および運転支援方法
12日前
株式会社アイシン
運転支援装置
5日前
本田技研工業株式会社
三次元造形装置及び鋳型造形方法
10日前
本田技研工業株式会社
車両制御システム、および制御方法
13日前
本田技研工業株式会社
会議支援システム及び会議支援方法
17日前
本田技研工業株式会社
非接触電力伝送システムの制御装置
2日前
本田技研工業株式会社
制御装置、プログラム及び制御方法
13日前
本田技研工業株式会社
位置推定装置および車両制御システム
5日前
本田技研工業株式会社
摩擦攪拌接合方法及びバッテリパック
19日前
本田技研工業株式会社
映像記録システム、及び映像記録方法
19日前
本田技研工業株式会社
シーリング材、自動車用シーリング材
13日前
本田技研工業株式会社
制御装置、制御方法、およびプログラム
6日前
本田技研工業株式会社
バッテリ制御装置及びバッテリ制御方法
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ