TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025080848
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194182
出願日
2023-11-15
発明の名称
位置推定装置および車両制御システム
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G01C
21/28 20060101AFI20250520BHJP(測定;試験)
要約
【課題】データの記憶量の増加を抑えつつ自車両の位置を精度よく推定する。
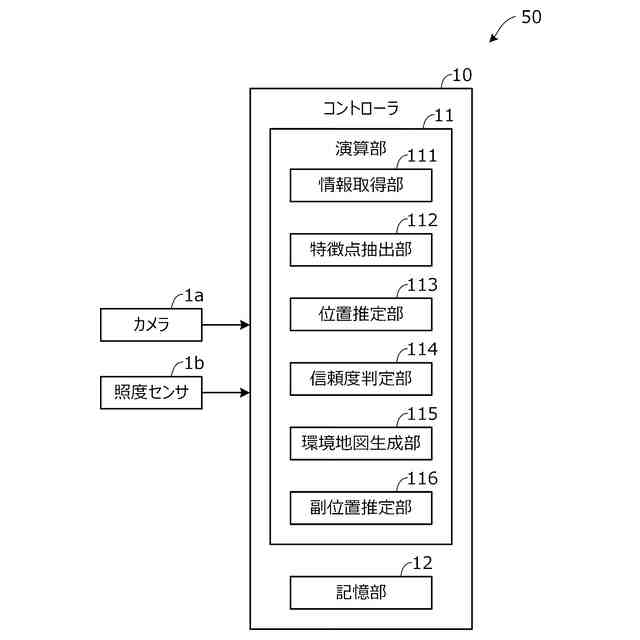
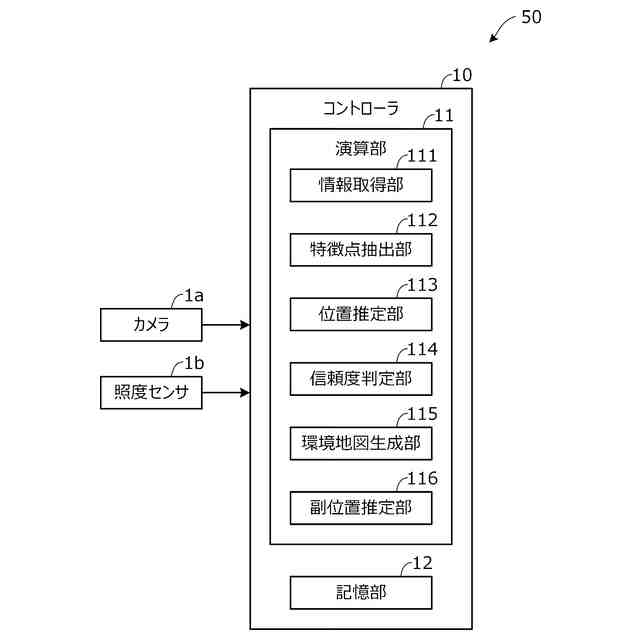
【解決手段】位置推定装置50は、カメラ1aのカメラ画像から特徴点を抽出する特徴点抽出部112と、予め外界状況に対応した特徴点を含む環境地図を記憶する記憶部12と、特徴点抽出部112により抽出された特徴点と、記憶部12に記憶された環境地図とに基づいて、自車両の位置を推定する位置推定部113と、位置推定部113で推定される自車両の位置の信頼度が所定程度未満であるか否かを判定する信頼度判定部114と、信頼度判定部114により信頼度が所定程度未満であると判定されると、特徴点抽出部112により抽出された特徴点を用いて環境地図を生成する環境地図生成部115と、特徴点抽出部112により抽出された特徴点と、環境地図生成部115で生成された環境地図とに基づいて自車両の位置を推定する副位置推定部116と、を備える。
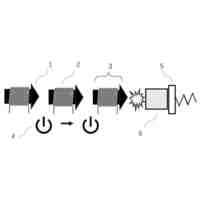
【選択図】図3
特許請求の範囲
【請求項1】
車両の外界状況を検出する検出器と、
前記検出器の検出データから特徴点を抽出する特徴点抽出部と、
予め前記外界状況に対応した特徴点を含む第1地図情報を記憶する記憶部と、
前記特徴点抽出部により抽出された前記特徴点と、前記記憶部に記憶された前記第1地図情報とに基づいて、前記車両の位置を推定する第1推定部と、
前記第1推定部で推定される前記車両の位置の信頼度が所定程度未満であるか否かを判定する信頼度判定部と、
前記信頼度判定部により前記信頼度が前記所定程度未満であると判定されると、前記特徴点抽出部により抽出された前記特徴点を用いて第2地図情報を生成する地図生成部と、
前記特徴点抽出部により抽出された前記特徴点と、前記地図生成部で生成された前記第2地図情報とに基づいて前記車両の位置を推定する第2推定部と、を備えることを特徴とする位置推定装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1記載の位置推定装置において、
前記第1地図情報は、前記車両が過去に走行した道路区間の地図情報であって、前記車両が前記道路区間を走行中に前記検出器により取得された前記検出データから前記特徴点抽出部により抽出された前記特徴点を含み、
前記第1推定部は、前記車両が前記道路区間を走行中に前記検出器により取得された現時点の前記検出データから前記特徴点抽出部により抽出された前記特徴点と、前記第1地図情報とに基づいて、前記道路区間を走行中の前記車両の現時点の位置を推定することを特徴とする位置推定装置。
【請求項3】
請求項2記載の位置推定装置において、
前記信頼度判定部は、現時点の前記検出データから前記特徴点抽出部により抽出された、前記車両の進行方向前方の所定領域に対応した前記特徴点の数と、前記記憶部に記憶された前記第1地図情報に含まれる前記特徴点のうち前記所定領域に対応した前記特徴点の数と、の差が所定閾値以上であるとき、前記信頼度が前記所定程度未満であると判定することを特徴とする位置推定装置。
【請求項4】
請求項3記載の位置推定装置において、
前記所定閾値は、前記第1地図情報に含まれる前記所定領域に対応した前記特徴点の数が多いほど大きい値が設定されることを特徴とする位置推定装置。
【請求項5】
請求項2記載の位置推定装置において、
前記検出器は第1検出器であり、
前記車両の周囲の明るさを検出する第2検出器と、
過去および現時点の前記道路区間の走行時における気象情報、時刻情報、および前記第2検出器の検出データを含む明るさ情報の少なくとも1つを含む、過去の環境情報および現時点の環境情報を取得する情報取得部と、をさらに備え、
前記信頼度判定部は、前記情報取得部により取得された前記過去の環境情報と前記現時点の環境情報とに基づいて、前記信頼度が前記所定程度未満であるか否かを判定することを特徴とする位置推定装置。
【請求項6】
請求項2記載の位置推定装置において、
前記車両が前記道路区間を走行中に、前記信頼度判定部により前記信頼度が前記所定程度未満であると判定された回数が所定数を超えたとき、前記車両の位置の推定を停止する停止指示を前記第1推定部および前記第2推定部に出力する停止制御部をさらに備えることを特徴とする位置推定装置。
【請求項7】
請求項1記載の位置推定装置において、
前記車両の車両状態を取得する状態取得部と、
前記状態取得部により取得された前記車両状態に基づいて、前記車両の位置の推定を停止する停止指示を前記第1推定部および前記第2推定部に出力する停止制御部と、をさらに備えることを特徴とする位置推定装置。
【請求項8】
請求項1~7のうちのいずれか1項に記載の位置推定装置と、
走行用アクチュエータと、
前記第1推定部または前記第2推定部により推定された前記車両の位置に基づいて、前記走行用アクチュエータを制御する走行制御部と、を備え、
前記走行制御部は、前記第1推定部により推定された前記車両の位置に基づいて前記走行用アクチュエータを制御しているときに、前記信頼度判定部により前記信頼度が前記所定程度未満であると判定されると、前記第1推定部により推定された前記車両の位置に基づく前記走行用アクチュエータの制御を停止し、前記第2推定部により推定された前記車両の位置に基づく前記走行用アクチュエータの制御を開始することを特徴とする車両制御システム。
【請求項9】
請求項8に記載の車両制御システムにおいて、
前記走行制御部は、前記第2推定部により推定された前記車両の位置に基づいて前記走行用アクチュエータを制御しているときに、前記信頼度判定部により前記信頼度が前記所定程度以上であると判定されると、前記第2推定部により推定された前記車両の位置に基づく前記走行用アクチュエータの制御を停止し、前記第1推定部により推定された前記車両の位置に基づく前記走行用アクチュエータの制御を再開することを特徴とする車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両の位置を推定する位置推定装置および車両制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
この種の装置として、従来、スマートフォン等の端末装置に搭載されたカメラの撮像画像から抽出された特徴点と、特徴点マップとを照合して、端末装置の現在位置を推定するように構成された装置が知られている(例えば特許文献1参照)。特許文献1記載の装置は、季節、時刻、天候等で規定される複数の撮像条件に対応した、複数の特徴点マップの中から、撮像画像が取得されたときの撮像条件に対応した特徴点マップを選択し、該特徴点マップを用いて端末装置の現在位置を推定する。
【先行技術文献】
【特許文献】
【0003】
特開2021-56629号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1記載の装置のように撮像条件ごとに特徴点マップを用意するようにしたのでは、データの記憶量が増加する。一方、データの記憶量の増加を抑えるために特定の撮像条件に対応した特徴点マップだけを用意すると、自車両の位置を精度よく推定することが難しい。
【課題を解決するための手段】
【0005】
本発明の一態様である位置推定装置は、車両の外界状況を検出する検出器と、検出器の検出データから特徴点を抽出する特徴点抽出部と、予め外界状況に対応した特徴点を含む第1地図情報を記憶する記憶部と、特徴点抽出部により抽出された特徴点と、記憶部に記憶された第1地図情報とに基づいて、車両の位置を推定する第1推定部と、第1推定部で推定される車両の位置の信頼度が所定程度未満であるか否かを判定する信頼度判定部と、信頼度判定部により信頼度が所定程度未満であると判定されると、特徴点抽出部により抽出された特徴点を用いて第2地図情報を生成する地図生成部と、特徴点抽出部により抽出された特徴点と、地図生成部で生成された第2地図情報とに基づいて車両の位置を推定する第2推定部と、を備える。
【0006】
本発明の他の態様である車両制御システムは、上記の位置推定装置と、走行用アクチュエータと、第1推定部または第2推定部により推定された車両の位置に基づいて、走行用アクチュエータを制御する走行制御部と、を備える。走行制御部は、第1推定部により推定された車両の位置に基づいて走行用アクチュエータを制御しているときに、信頼度判定部により信頼度が所定程度未満であると判定されると、第1推定部により推定された車両の位置に基づく走行用アクチュエータの制御を停止し、第2推定部により推定された車両の位置に基づく走行用アクチュエータの制御を開始する。
【発明の効果】
【0007】
本発明によれば、データの記憶量の増加を抑えつつ自車両の位置を精度よく推定する。
【図面の簡単な説明】
【0008】
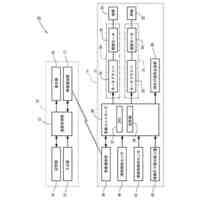
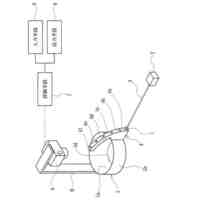
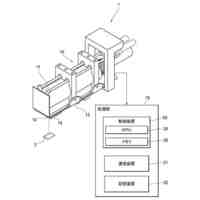
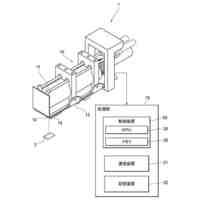
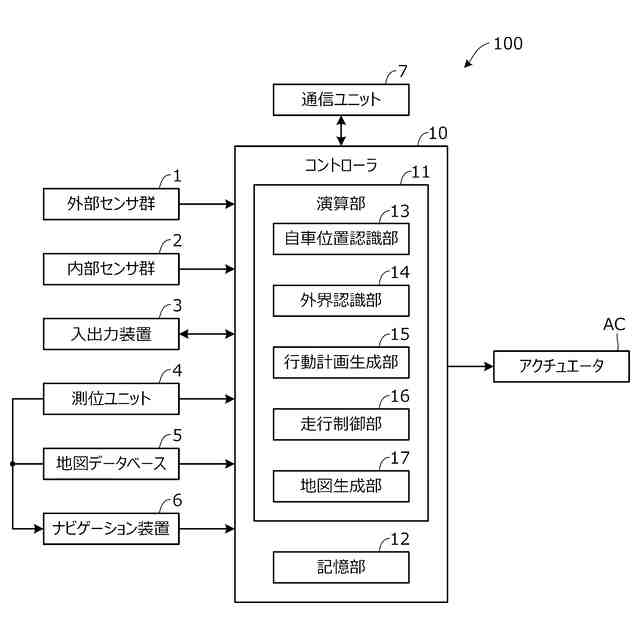
本発明の実施の形態に係る車両制御システムの全体構成を概略的に示すブロック図。
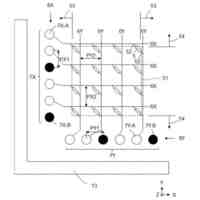
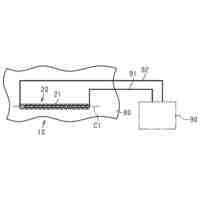
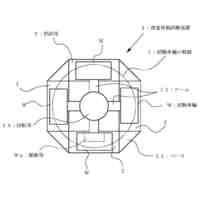
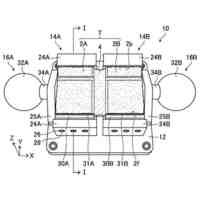
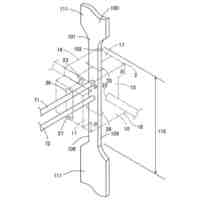
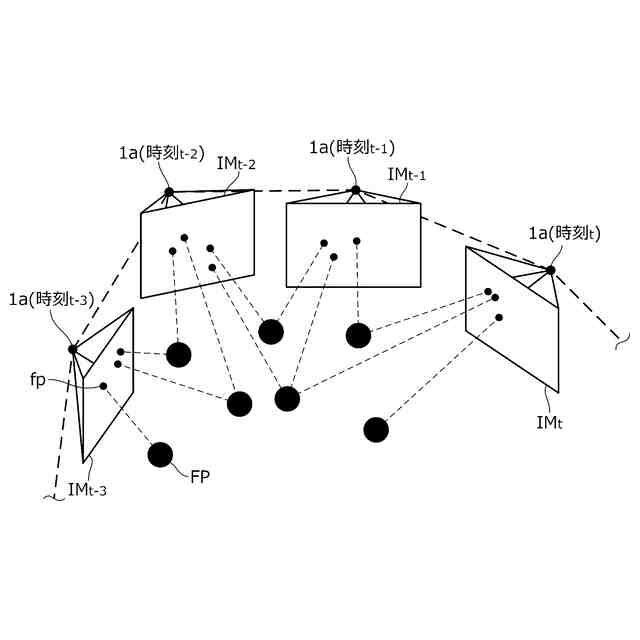
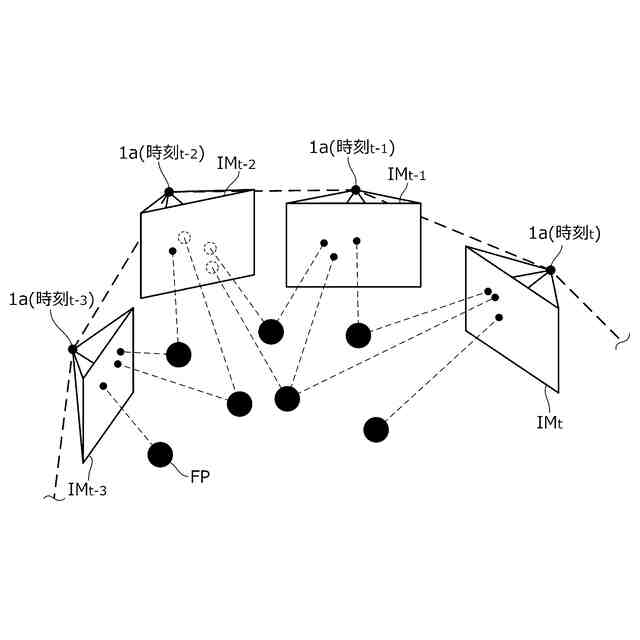
図1の自車位置認識部における位置認識処理を説明するための図。
図1の自車位置認識部における位置認識処理を説明するための図。
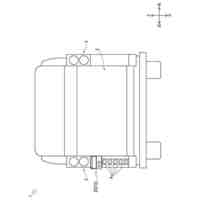
本発明の実施の形態に係る位置推定装置の要部構成を示すブロック図。
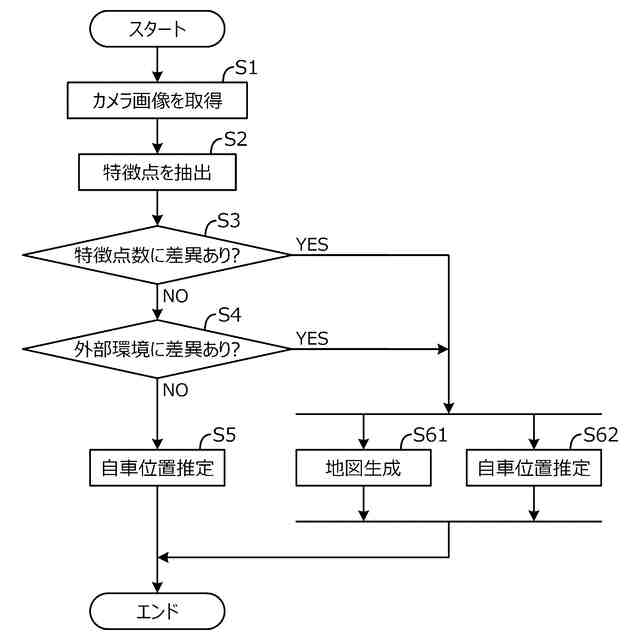
図3のコントローラのCPUで実行される処理の一例を示すフローチャート。
【発明を実施するための形態】
【0009】
以下、図面を参照して発明の実施の形態について説明する。本発明の実施の形態に係る位置推定装置は、自動運転機能を有する車両、すなわち自動運転車両に適用することができる。なお、本実施の形態に係る位置推定装置が適用される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
【0010】
まず、自動運転に係る自車両の概略構成について説明する。図1は、本実施の形態に係る位置推定装置を有する自車両の車両制御システム100の全体構成を概略的に示すブロック図である。図1に示すように、車両制御システム100は、コントローラ10と、コントローラ10にそれぞれ通信可能に接続された外部センサ群1と、内部センサ群2と、入出力装置3と、測位ユニット4と、地図データベース5と、ナビゲーション装置6と、通信ユニット7と、走行用のアクチュエータACとを主に有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
1か月前
株式会社イシダ
計量装置
29日前
日本精機株式会社
表示装置
15日前
日本精機株式会社
アセンブリ
21日前
株式会社エビス
水準器
14日前
個人
準結晶の解析方法
21日前
株式会社豊田自動織機
自動走行体
20日前
株式会社不二越
塵埃噴射装置
9日前
日本碍子株式会社
ガスセンサ
14日前
個人
浸透探傷試験方法
10日前
株式会社東芝
センサ
9日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
検査装置
29日前
日本特殊陶業株式会社
ガスセンサ
21日前
GEE株式会社
光学特性測定装置
20日前
日本特殊陶業株式会社
ガスセンサ
9日前
日本特殊陶業株式会社
ガスセンサ
8日前
株式会社不二越
X線測定装置
15日前
東ソー株式会社
簡易型液体クロマトグラフ
1か月前
個人
多段電磁加速による高力積衝撃試験機
2日前
TDK株式会社
アレイセンサ
10日前
株式会社不二越
X線測定装置
15日前
株式会社TISM
センサ部材
20日前
学校法人 中央大学
管内径推定装置
今日
リバークル株式会社
荷重移動試験装置
29日前
大和製衡株式会社
表示システム
27日前
株式会社小糸製作所
物体検知システム
21日前
東洋紡株式会社
ヘムタンパク質の安定化方法
3日前
TDK株式会社
計測装置
15日前
株式会社ニコン
検出装置
1か月前
栗田工業株式会社
水処理システム
13日前
TDK株式会社
温度センサ
13日前
個人
簡易・迅速タンパク質検出装置および方法
10日前
大和ハウス工業株式会社
引張装置
28日前
エスペック株式会社
温度槽及び試験方法
16日前
株式会社イシダ
X線検査装置
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ