TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080834
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194158
出願日
2023-11-15
発明の名称
運転支援装置
出願人
株式会社アイシン
,
本田技研工業株式会社
代理人
弁理士法人ネクスト
主分類
G01S
15/46 20060101AFI20250520BHJP(測定;試験)
要約
【課題】検出センサの表面に水滴などの異物が付着した状態において、存在しない対象物に対する誤った支援が行われないようにした運転支援装置を提供する。
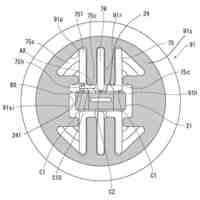
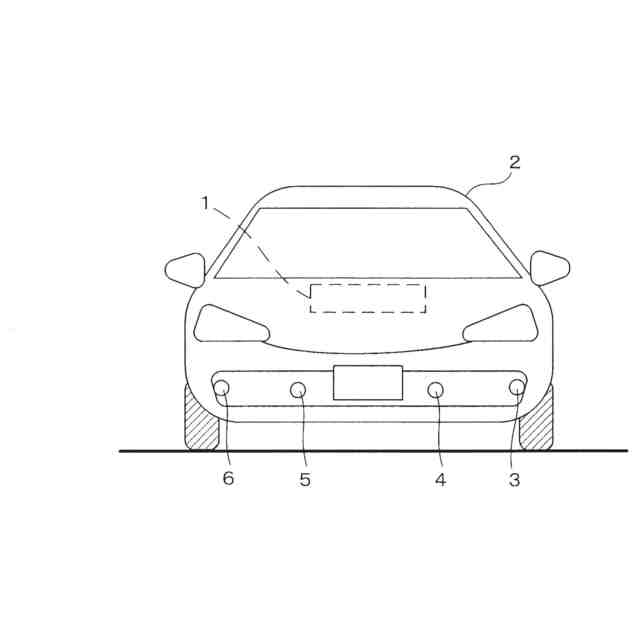
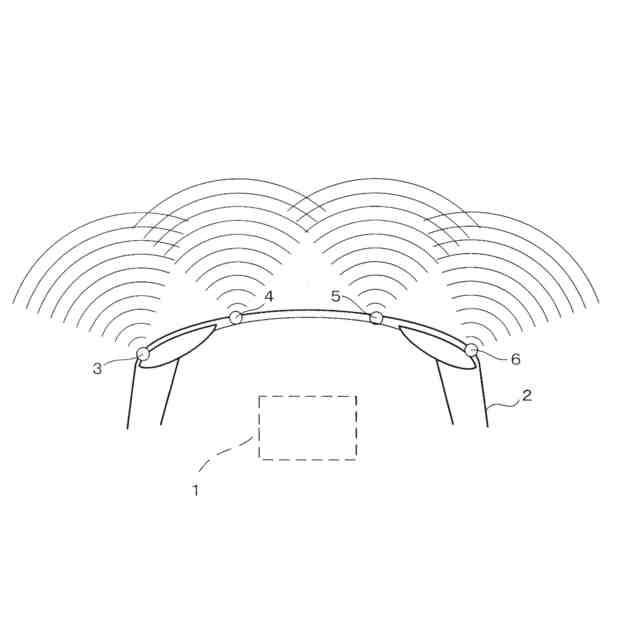
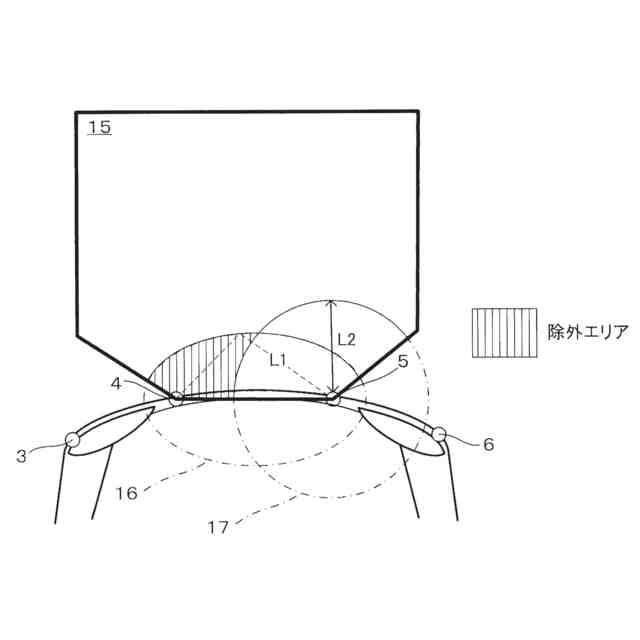
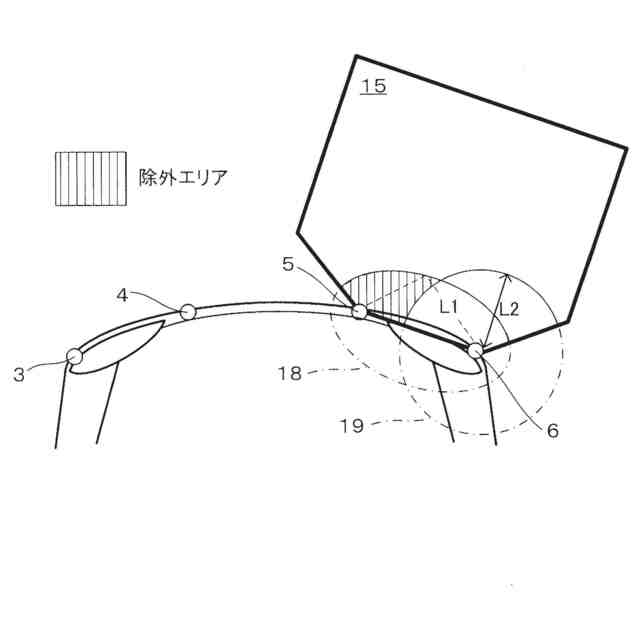
【解決手段】車両2に対して設置された各超音波センサ3~6の検出結果に基づいて対象物の位置を特定し、特定された対象物の位置が支援対象エリア15内に位置する場合に、対象物に対する運転者への支援を行う一方、例えば第3超音波センサ5を送信側、第2超音波センサ4を受信側とした組み合わせで対象物を検出する場合に、第2超音波センサ4及び第3超音波センサ5の各位置までの距離の和が第1距離以下で且つ第3超音波センサ5までの距離が第2距離以上となるエリアを、支援対象エリア15から除くように構成する。
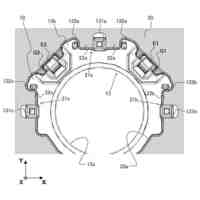
【選択図】図6
特許請求の範囲
【請求項1】
車両に対して異なる場所に夫々設置され、車両の周囲に対して探査波を送信するとともに前記探査波が車両の周囲にある対象物によって反射した反射波を含む受信波を相互に受信可能な位置関係にある第1検出センサ及び第2検出センサと、
前記第1検出センサ及び第2検出センサの検出結果に基づいて前記対象物の位置を特定する位置特定手段と、
前記位置特定手段により特定された前記対象物の位置が支援対象エリア内に位置する場合に、前記対象物に対する運転者への支援を行う支援手段と、を有し、
前記第1検出センサ及び前記第2検出センサの各位置までの距離の和が第1距離以下で且つ前記第1検出センサまでの距離が第2距離以上となるエリアを、前記支援対象エリアから除く運転支援装置。
続きを表示(約 590 文字)
【請求項2】
車両に対して複数の検出センサが設置されている場合に、複数の検出センサから前記第1検出センサ及び前記第2検出センサの組み合わせとして可能な組み合わせを選択し、
選択された前記第1検出センサ及び前記第2検出センサの組み合わせ毎に、
前記位置特定手段は、前記第1検出センサ及び第2検出センサの検出結果に基づいて前記対象物の位置を特定し、
前記支援手段は、前記第1検出センサ及び第2検出センサの組み合わせに対して設定された前記支援対象エリアを用いて、前記対象物の位置が前記支援対象エリア内に位置するか否かを判定する請求項1に記載の運転支援装置。
【請求項3】
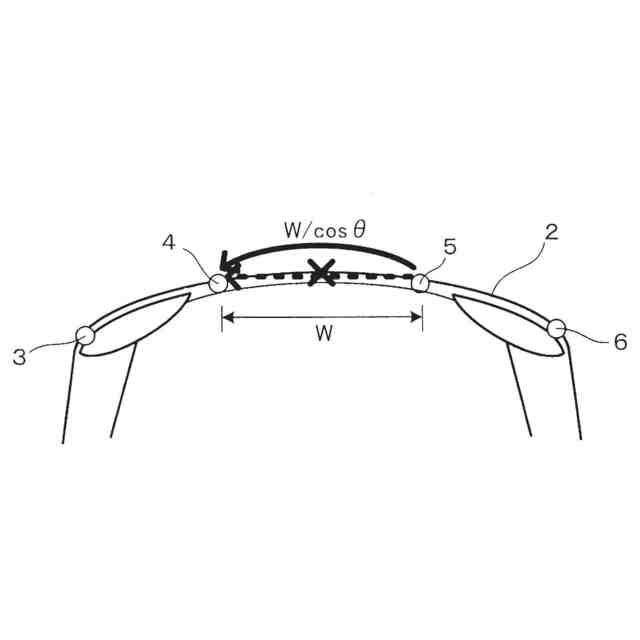
前記第1距離は、前記第1検出センサと前記第2検出センサとの間の距離を前記第1検出センサ及び第2検出センサの特性によって補正した距離に、更に測定誤差を考慮した距離を加算した距離とする請求項1又は請求項2に記載の運転支援装置。
【請求項4】
前記第2距離は、地面に対する前記第1検出センサの設置高さに測定誤差を考慮した距離を減算した距離、或いは前記第1検出センサの表面に水滴がついた状態で送信した探査波を前記第1検出センサ自らが受信することにより対象物までの距離として誤検出されてしまう距離、のいずれかとする請求項1又は請求項2に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転支援を行う運転支援装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来より車両の走行時や駐車時において安全を確保する為の安全装置として、車両に対して超音波センサ、ミリ波レーダセンサ、LiDARセンサ等の周囲の対象物(例えば人、自転車、他車両、壁など)を検出する為の検出センサを配置し、検出センサの検出結果に基づいて運転者に警告を行ったり車両の自動制御を行う技術について知られている。
【0003】
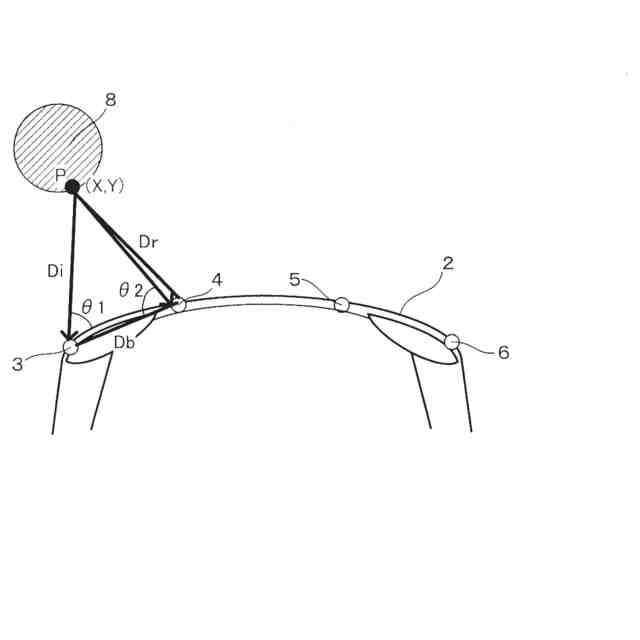
このような検出センサは、例えば超音波、ミリ波、赤外線等の探査波を出力するとともに出力した探査波が対象物に反射して戻ってくるまでの時間を計測し、対象物までの距離を検出する。また、車両に対して検出センサを複数個配置すれば、直接波に加えて間接波を用いることが可能となり、対象物のより正確な検出も可能となる。尚、『直接波』は探査波を送信した検出センサと、当該探査波の対象物による反射波を受信波として受信した検出センサとが同一である場合の当該受信波をいう。一方、『間接波』は探査波を送信した検出センサと、当該探査波の対象物による反射波を受信波として受信した検出センサとが異なる場合の当該受信波をいう。
【0004】
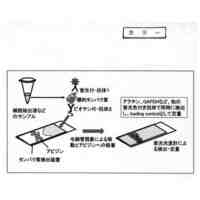
しかしながら、上記検出センサは悪天候時において検出センサの表面に水滴などの異物が付着してしまうと、異物によって探査波が想定しない方向(例えば鉛直下方や真横など)に出力され、例えば地面までの距離を前方にある対象物までの距離と誤検出してしまう(対象物がないのに対象物があると認識してしまう)場合があった。そこで、例えば特許第7192647号公報には直接波によって至近距離に対象物を検知し、且つ間接波が受信できない状態が所定時間以上継続すると、検出センサに異物が付着していると判定する技術について開示されている。
【先行技術文献】
【特許文献】
【0005】
特許第7192647号公報(段落0055-0058)
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、上記特許文献1では直接波によって至近距離に対象物を検知し、且つ間接波が受信できない状態が予め決められた所定時間以上継続したことを検出センサに異物が付着していると判定する条件としているが、上記条件では検出センサへの異物の付着を正確に判定できない場合があった。例えば、図11に示すように検出センサS1が検出センサS2から出力された探査波を間接波として受信できたとしても、検出センサS2の表面に異物が付着している状態では異物によって探査波が本来想定しない鉛直下方や真横などに出力されることがあるので、その間接波が対象物に反射せずに直接受信した探査波となる可能性もあるし、対象物ではなく地面に反射して受信した探査波となる可能性もある。そのような間接波を受信すると、実際には存在しない対象物が至近距離にあると認識されてしまう可能性があるが、上記特許文献1の技術では検出センサに異物が付着していると判定することができない。即ち、存在しない対象物に対する警告や車両の自動制御が行われてしまう可能性が依然として残されていた。
【0007】
本発明は前記従来における問題点を解消するためになされたものであり、検出センサの表面に水滴などの異物が付着した状態において、存在しない対象物に対する誤った支援が行われないようにした運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため本発明に係る運転支援装置は、車両に対して異なる場所に夫々設置され、車両の周囲に対して探査波を送信するとともに前記探査波が車両の周囲にある対象物によって反射した反射波を含む受信波を相互に受信可能な位置関係にある第1検出センサ及び第2検出センサと、前記第1検出センサ及び第2検出センサの検出結果に基づいて前記対象物の位置を特定する位置特定手段と、前記位置特定手段により特定された前記対象物の位置が支援対象エリア内に位置する場合に、前記対象物に対する運転者への支援を行う支援手段と、を有し、前記第1検出センサ及び前記第2検出センサの各位置までの距離の和が第1距離以下で且つ前記第1検出センサまでの距離が第2距離以上となるエリアを、前記支援対象エリアから除く。
【発明の効果】
【0009】
前記構成を有する本発明に係る運転支援装置によれば、検出センサの表面に水滴などの異物が付着した状態において存在しないはずの対象物が特定される可能性のある位置を予め支援対象エリアから除くことにより、存在しない対象物に対する誤った支援が行われないようにすることが可能となる。
【図面の簡単な説明】
【0010】
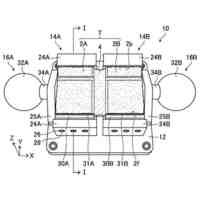
本実施形態に係る車両を正面から見た正面図である。
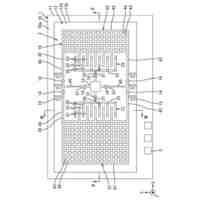
本実施形態に係る車両を上面から見た上面図である。
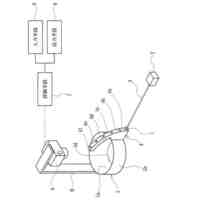
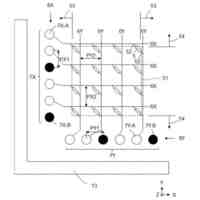
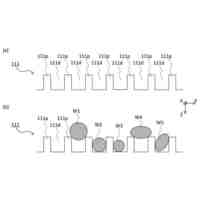
車両の前方に対象物が存在する場合において対象物の具体的な位置(車両に対する相対位置)を特定する方法について説明した図である。
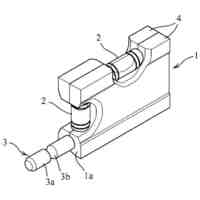
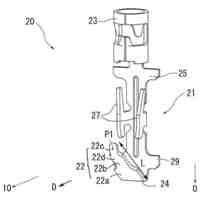
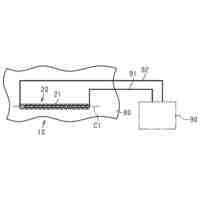
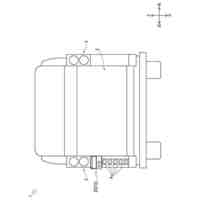
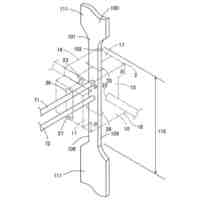
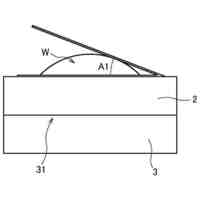
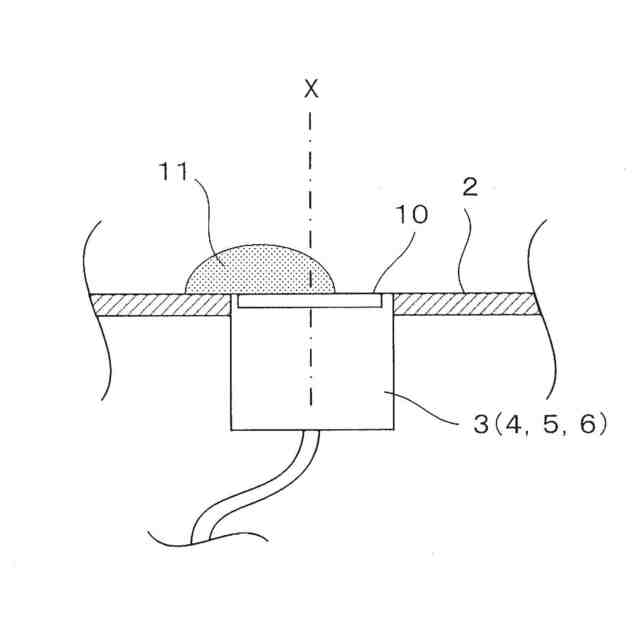
車両の外壁に設置された状態の超音波センサを示した図である。
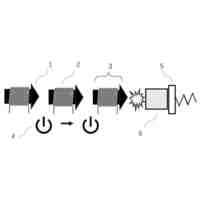
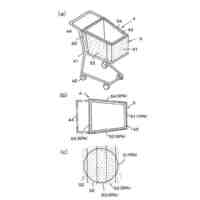
超音波センサの送受信面に水滴などの異物が付着する場合について説明した図である。
支援対象エリアの一例を示した図である。
第1距離について説明した図である。
支援対象エリアの一例を示した図である。
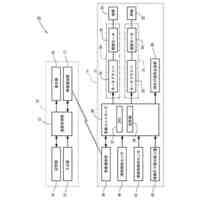
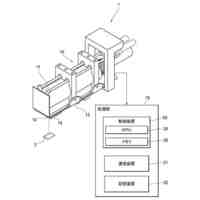
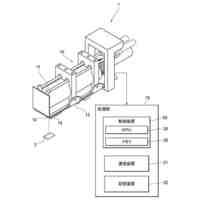
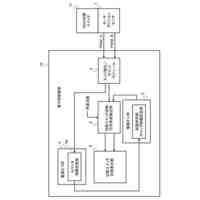
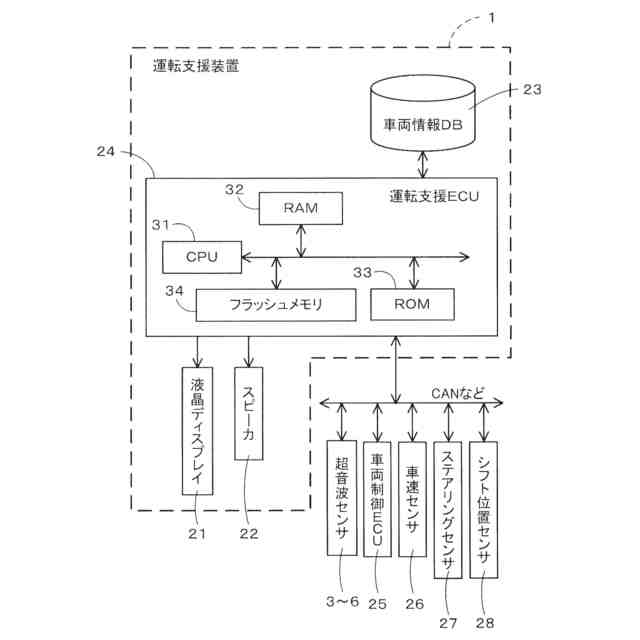
本実施形態に係る運転支援装置の構成を示したブロック図である。
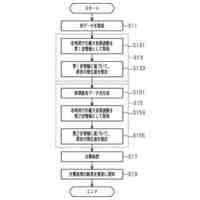
本実施形態に係る運転支援処理プログラムのフローチャートである。
従来技術の問題点について説明した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
16日前
株式会社エビス
水準器
15日前
日本精機株式会社
アセンブリ
22日前
個人
準結晶の解析方法
22日前
株式会社豊田自動織機
自動走行体
21日前
個人
浸透探傷試験方法
11日前
日本碍子株式会社
ガスセンサ
15日前
株式会社不二越
塵埃噴射装置
10日前
トヨタ自動車株式会社
制御装置
11日前
株式会社東芝
センサ
10日前
日本特殊陶業株式会社
ガスセンサ
10日前
日本特殊陶業株式会社
ガスセンサ
22日前
GEE株式会社
光学特性測定装置
21日前
日本特殊陶業株式会社
ガスセンサ
9日前
学校法人 中央大学
管内径推定装置
1日前
株式会社不二越
X線測定装置
16日前
TDK株式会社
アレイセンサ
11日前
個人
多段電磁加速による高力積衝撃試験機
3日前
株式会社不二越
X線測定装置
16日前
株式会社TISM
センサ部材
21日前
大和製衡株式会社
表示システム
28日前
TDK株式会社
計測装置
16日前
東洋紡株式会社
ヘムタンパク質の安定化方法
4日前
株式会社小糸製作所
物体検知システム
22日前
大和ハウス工業株式会社
引張装置
29日前
個人
簡易・迅速タンパク質検出装置および方法
11日前
エスペック株式会社
温度槽及び試験方法
17日前
栗田工業株式会社
水処理システム
14日前
TDK株式会社
温度センサ
14日前
株式会社 システムスクエア
検査選別装置
11日前
トヨタ自動車株式会社
音源推定方法
28日前
トヨタ自動車株式会社
鋳巣の強度評価方法
1日前
ローム株式会社
加速度センサ
11日前
アンリツ株式会社
機器及びフィルタ
22日前
株式会社イシダ
搬送装置
28日前
Astemo株式会社
電子制御装置
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ