TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043424
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023150667
出願日
2023-09-19
発明の名称
ロッカーボギー車
出願人
株式会社明電舎
代理人
園田・小林弁理士法人
主分類
B62D
61/10 20060101AFI20250325BHJP(鉄道以外の路面車両)
要約
【課題】立板が設けられていない段差を容易に、かつ安定して踏破することができる、ロッカーボギー車を提供することである。
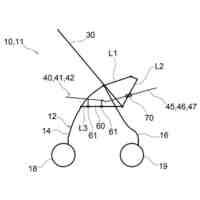
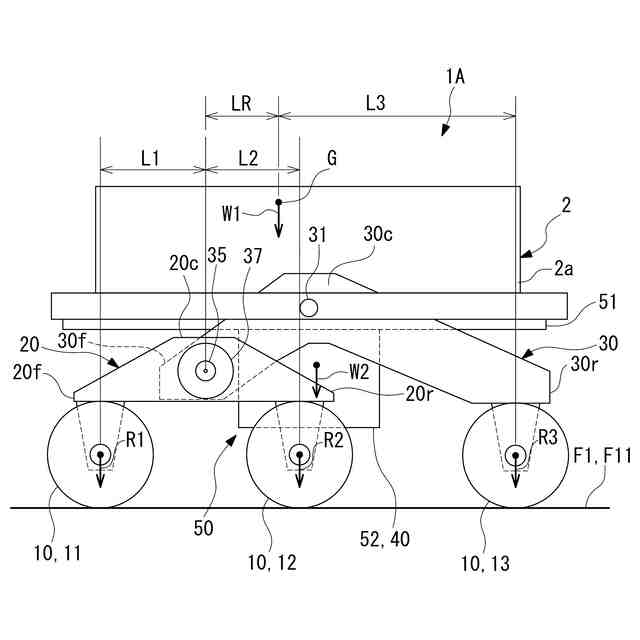
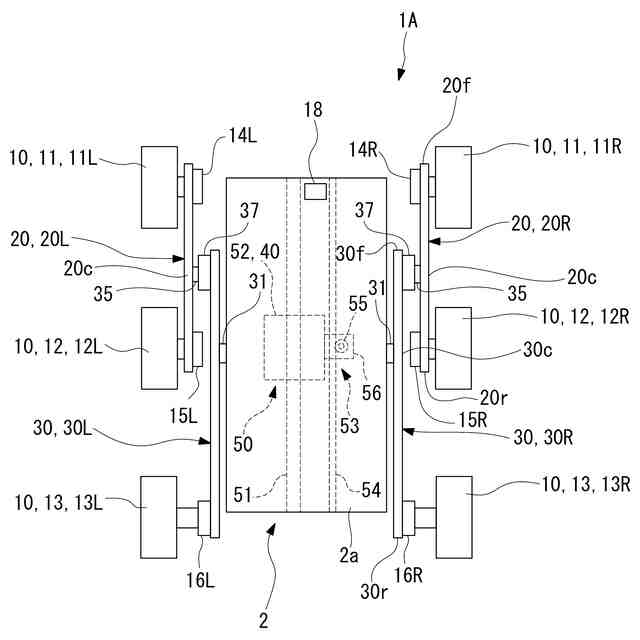
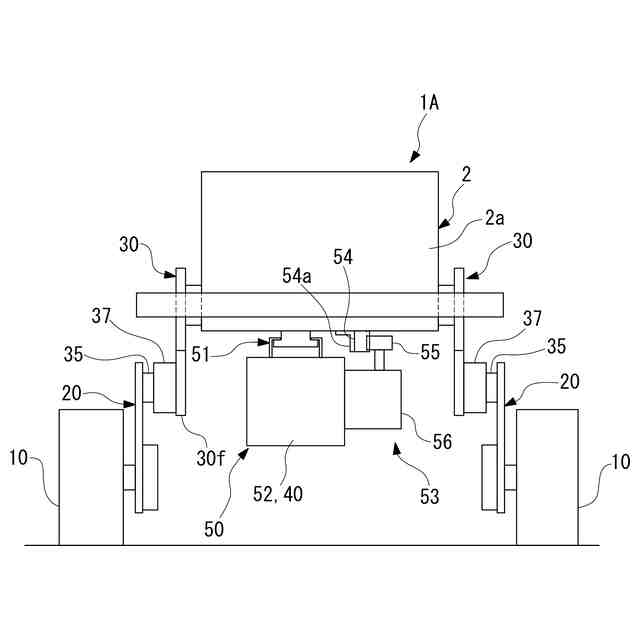
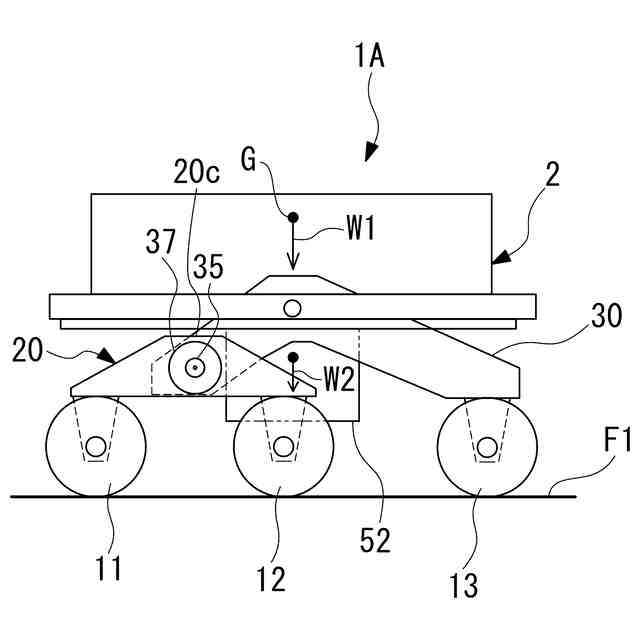
【解決手段】ロッカーボギー車1Aは、車体部2と、制御部と、を備え、車体部2は、前輪11と中輪12の各々を軸支し、これらを連結するボギーリンク20と、ボギーリンク20の前輪11と中輪12の間の中間部20cと、後輪13と、を軸支し、これらを連結するロッカーリンク30と、ロッカーリンク30がボギーリンク20を軸支する回転軸35を中心に、ロッカーリンク30に対してボギーリンク20を回転させるモータ37と、を備え、制御部は、段差を踏破する場合に、モータ37を制御してボギーリンク20を回転させて前輪11と後輪13のいずれか一方の車輪10を上昇または下降させることで、車輪10を路面F1、F11から離間させ、その際には、前後方向における車体部2の荷重バランスを変動させ、一方の車輪10とは前後方向において反対側における車体部2の荷重を増大させる。
【選択図】図1
特許請求の範囲
【請求項1】
前輪、中輪、及び後輪の各々が、左右に一対設けられたロッカーボギー車であって、
車体部と、
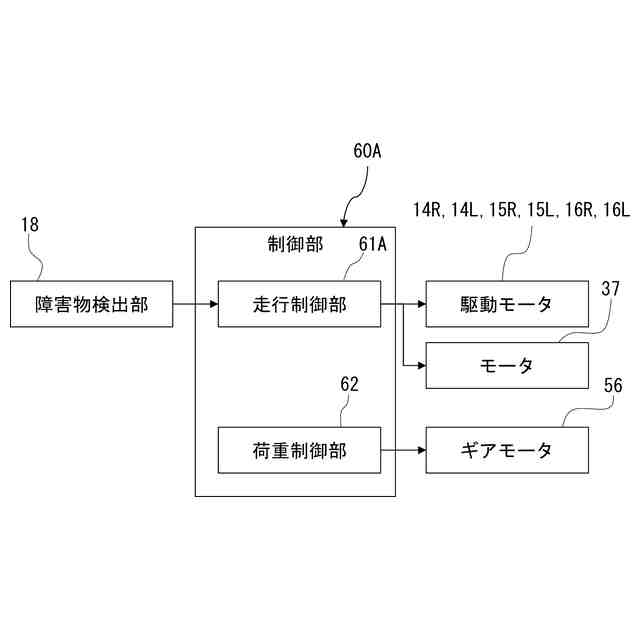
前記車体部の動作を制御する制御部と、を備え、
前記車体部は、
前記前輪と前記中輪の各々を軸支し、これらを連結するボギーリンクと、
前記ボギーリンクの前記前輪と前記中輪の間の中間部と、前記後輪と、を軸支し、これらを連結するロッカーリンクと、
前記ロッカーリンクが前記ボギーリンクを軸支する回転軸を中心に、前記ロッカーリンクに対して前記ボギーリンクを回転させるモータと、
を備え、
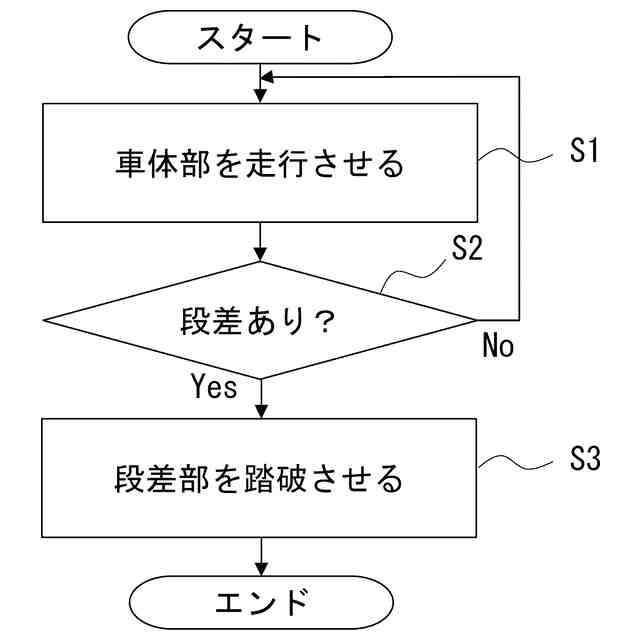
前記制御部は、段差を踏破する場合に、前記モータを制御して前記ボギーリンクを回転させて前記前輪と前記後輪のいずれか一方の車輪を上昇または下降させることで、前記一方の車輪を路面から離間させ、その際には、前後方向における前記車体部の荷重バランスを変動させ、前記一方の車輪とは前記前後方向において反対側における前記車体部の荷重を増大させる、ロッカーボギー車。
続きを表示(約 1,500 文字)
【請求項2】
重心の位置を前後方向に移動させる重心移動機構を更に備え、
前記制御部は、前記一方の車輪を上昇または下降させる際には、前記重心移動機構を制御して、前記重心の前記位置を、前記一方の車輪とは前記前後方向において反対側へと移動させることで、前記一方の車輪とは前記前後方向において反対側における前記車体部の荷重を増大させる、請求項1に記載のロッカーボギー車。
【請求項3】
前記重心移動機構は、
前記前後方向に延びるように設けられたレール部と、
前記レール部上を前記前後方向に移動自在に設けられた質量体と、
前記質量体を前記レール部上で移動させる駆動部と、
を備え、
前記制御部は、前記駆動部を制御して、前記質量体を前記前後方向に移動させることで、前記重心の位置を前記前後方向に移動させる、請求項2に記載のロッカーボギー車。
【請求項4】
前記前輪、前記中輪、及び前記後輪の各々を駆動するように設けられた駆動モータを更に備え、
前記制御部は、前記駆動モータにより、前記前輪、前記中輪、及び前記後輪の各々を前進または後進するように回転させ、その後、前記前輪、前記中輪、及び前記後輪の各々を逆方向へと回転させることで、前記前後方向における前記車体部の荷重バランスを変動させる、請求項1に記載のロッカーボギー車。
【請求項5】
前記前輪、前記中輪、及び前記後輪の各々を駆動するように設けられた駆動モータを更に備え、
前記制御部は、前記駆動モータにより、前記前輪、前記中輪、及び前記後輪の各々を加速しつつ前進または後進するように回転させることで、前記前後方向における前記車体部の荷重バランスを変動させる、請求項1に記載のロッカーボギー車。
【請求項6】
前記制御部は、上への前記段差を上る際に、
後方における前記車体部の荷重を増大させ、前記前輪を上昇させて前記路面から離間させ、
前記中輪と前記後輪を前進させて前記前輪を前記段差の上の段差面へと接地させ、
前記回転軸を中心に前記ボギーリンクを回転させて、前記前輪と前記後輪を前記段差面及び前記路面に接地させつつ前記中輪を上昇させて前記路面から離間させ、
前記前輪と前記後輪を前進させて前記中輪を前記段差面へと接地させ、
前方における前記車体部の荷重を増大させた後、前記回転軸を中心に前記ボギーリンクを回転させて、前記前輪と前記中輪を前記段差面に接地させつつ前記後輪を上昇させて前記路面から離間させ、
前記前輪と前記中輪を前進させて前記後輪を前記段差面へと接地させる
ように制御する、請求項1から5のいずれか一項に記載のロッカーボギー車。
【請求項7】
前記制御部は、下への前記段差を下る際に、
後方における前記車体部の荷重を増大させ、
前記中輪と前記後輪を前進させつつ、前記回転軸を中心に前記ボギーリンクを回転させて、前記前輪を下降させて前記段差の下の段差面へと接地させ、
前記前輪と前記後輪を前進させつつ、前記回転軸を中心に前記ボギーリンクを回転させて、前記中輪を下降させて前記段差面へと接地させ、
前方における前記車体部の荷重を増大させ、
前記前輪と前記中輪を前進させつつ、前記回転軸を中心に前記ボギーリンクを回転させて、前記後輪を下降させて前記段差面へと接地させる
ように制御する、請求項1から3のいずれか一項に記載のロッカーボギー車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロッカーボギー車に関する。
続きを表示(約 7,100 文字)
【背景技術】
【0002】
車輪により走行する車両においては、通常、不整地を走行させたり、段差を踏破させたりするような場合における走行性能が、一般的には高くはない。このため、不整地や段差の走行性能を高めるための、車両に関する技術開発が行われている。このような、高い不整地走行性能を有する車両のひとつとして、ロッカーリンクとボギーリンクにより3対の動輪を有する構造の、ロッカーボギー車が挙げられる。
例えば特許文献1には、前輪、中輪及び後輪の各々が左右に一対ずつ設けられた計6輪のロッカーボギー車が開示されている。このロッカーボギー車は、前輪及び中輪が各々軸支されるボギーリンクと、後輪が軸支されるロッカーリンクと、ロッカーリンクに接続される本体と、を備え、ボギーリンクは、本体又はロッカーリンクに軸支されて、自由回転又は動的な回転可能であり、ロッカーリンクは、本体に固定されている。
【0003】
特許文献1に記載されたようなロッカーボギー車において、段差を上る際には、ボギーリンクを回転させて、前輪を、ロッカーボギー車が現在位置している路面から離間させて上に位置する段差の高さまで上昇させる必要がある。しかし、前輪には一定の荷重が作用しているため、これに逆らって前輪を上昇させるには、ボギーリンクを回転させるトルクを大きなものとする必要がある。このため、ロッカーボギー車が現在位置している路面と上に位置する段差の間の垂直面(階段における蹴込板、以降、立板と呼称する)に対して前輪を当接させ、回転させることで、前輪と立板の間に摩擦力を生じせしめ、これによって前輪を上昇させる力の一部を負担させることで、段差を上る際の、ボギーリンクを回転させるトルクを、小さくすることがある。
この場合には、より具体的には、次のような手順で、ロッカーボギー車は段差を上る。まず前輪を立板に当接させ、ロッカーリンクに対してボギーリンクを回転させて前輪を持ち上げつつ、前輪を前進方向に回転させ、前輪と立板の間に生じる摩擦力によって、立板を蹴上がるように、前輪を段差の上に持ち上げる。次に、ロッカーボギー車を前進させて中輪を立板に当接させ、この状態で、ボギーリンクを回転させて中輪を持ち上げつつ、中輪を前進方向に回転させて、中輪と立板の間に生じる摩擦力によって中輪を段差の上に持ち上げる。最後に、ロッカーボギー車を前進させて後輪を立板に当接させ、この状態で、ボギーリンクを回転させて後輪を持ち上げつつ、後輪を前進方向に回転させて、後輪と立板の間に生じる摩擦力によって後輪を段差の上に持ち上げる。このようにすれば、ボギーリンクを回転させるトルクに加え、車輪と立板との間の摩擦力によって車輪を上昇させることができるため、ボギーリンクを回転させるトルクが小さくなり、車輪を容易に上昇させることができる。したがって、ロッカーボギー車が、段差を容易に、上ることができる。
段差を下る際にも、ロッカーボギー車が現在位置している路面と下に位置する段差の間の立板に対して車輪を当接させつつ回転させながら車輪を下ろすことで、ロッカーボギー車が容易に段差を下ることができる。
【0004】
また、例えば段差を上る際に前輪を上昇させる場合においては、前輪が路面から離間して空中に位置し、ロッカーボギー車は路面に接地する中輪と後輪により主に支持されることとなるため、ロッカーボギー車は前方へと倒れやすい、不安定な姿勢となるところ、前輪は立板に当接した状態となっているため、前方への転倒は、立板によって阻まれ、抑制される。前輪と中輪を段差の上に上らせた後に後輪を上昇させる場合においては、後輪が路面から離間して空中に位置し、ロッカーボギー車は、段差の先(この場合には段差の上)の表面(以降、段差面と呼称する)に接地する前輪と中輪により主に支持されることとなるため、ロッカーボギー車は後方へと倒れやすい、不安定な姿勢となるところ、後輪は立板に当接した状態となっているため、後方への転倒は、立板によって阻まれ、抑制される。段差を下る場合においても同様に、前輪、中輪、及び後輪はいずれも、路面、立板、及び、段差の先(この場合には段差の下)の段差面のいずれかに当接した状態となっているため、前方または後方への転倒が抑制される。このようにして、車輪を立板に当接させて回転させつつ段差を上昇または下降させる場合においては、段差を安定した状態で踏破することができる。
【0005】
これに対し、立板がないような段差をロッカーボギー車が踏破しようとする場合には、上昇または下降させる車輪を立板に当接させることができない。この場合には、車輪を段差の上に上昇させる際に、立板と車輪との間の摩擦力を利用できず、車輪を、ボギーリンクを回転させるトルクのみによって上昇させる必要があるため、段差を上ることが難しくなる。
また、段差を踏破するに際して、前輪を路面から離間させて段差を上昇または下降させている最中においては、前輪は路面、立板、段差面のいずれにも当接しておらず、ロッカーボギー車は路面に接地した中輪と後輪のみによって支持された状態となっているため、ロッカーボギー車が前方に転倒する可能性がある。あるいは、ロッカーボギー車の重心の位置が前方に偏っている場合においては、段差を上る際に前輪を路面から上昇させて離間させようとしても、前輪が上昇せずに、替わりに後輪が上昇してしまう可能性がある。
前輪と中輪が段差を上り、あるいは下った後に、後輪を路面から離間させて段差を上昇または下降させている最中においても同様に、後輪は路面、立板、段差面のいずれにも当接しておらず、ロッカーボギー車は段差面に接地した前輪と中輪のみによって支持された状態となっているため、ロッカーボギー車が後方に転倒する可能性がある。あるいは、ロッカーボギー車の重心の位置が後方に偏っている場合においては、段差を上る際に後輪を路面から上昇させて離間させようとしても、後輪が上昇せずに、替わりに前輪が上昇してしまう可能性がある。
このように、段差に立板がない場合においては、ロッカーボギー車は段差を安定して踏破できない可能性がある。
【先行技術文献】
【特許文献】
【0006】
特開2023-6068号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、立板が設けられていない段差を容易に、かつ安定して踏破することができる、ロッカーボギー車を提供することである。
【課題を解決するための手段】
【0008】
本発明は、上記課題を解決するため、以下の手段を採用する。
すなわち、本発明のロッカーボギー車は、前輪、中輪、及び後輪の各々が、左右に一対設けられたロッカーボギー車であって、車体部と、前記車体部の動作を制御する制御部と、を備え、前記車体部は、前記前輪と前記中輪の各々を軸支し、これらを連結するボギーリンクと、前記ボギーリンクの前記前輪と前記中輪の間の中間部と、前記後輪と、を軸支し、これらを連結するロッカーリンクと、前記ロッカーリンクが前記ボギーリンクを軸支する回転軸を中心に、前記ロッカーリンクに対して前記ボギーリンクを回転させるモータと、を備え、前記制御部は、段差を踏破する場合に、前記モータを制御して前記ボギーリンクを回転させて前記前輪と前記後輪のいずれか一方の車輪を上昇または下降させることで、前記一方の車輪を路面から離間させ、その際には、前後方向における前記車体部の荷重バランスを変動させ、前記一方の車輪とは前記前後方向において反対側における前記車体部の荷重を増大させる。
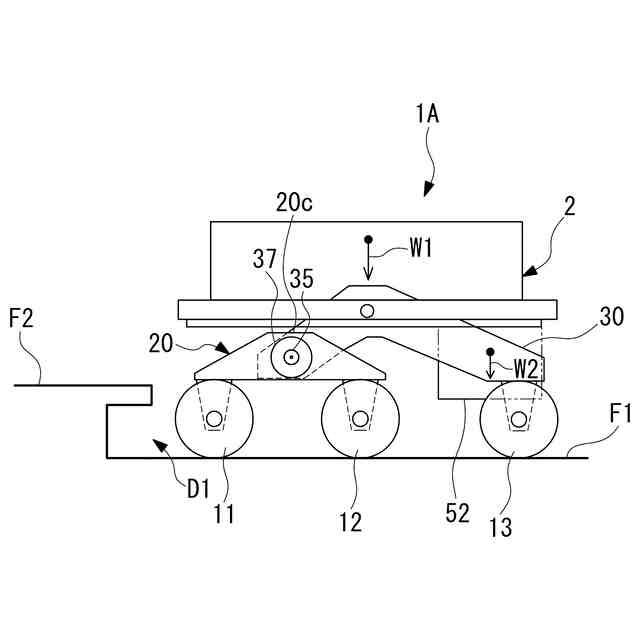
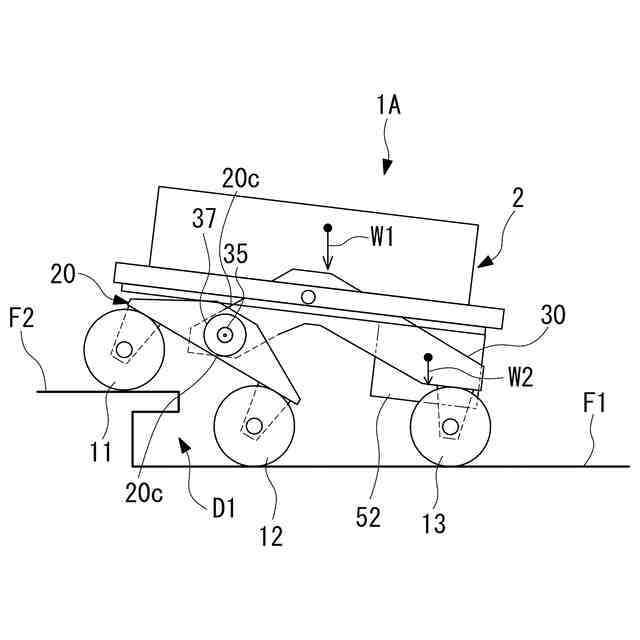
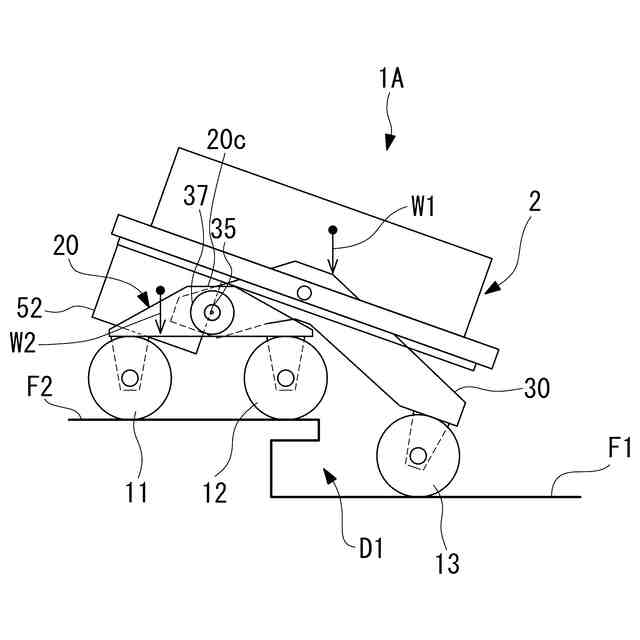
ロッカーボギー車は、前輪と中輪の各々を軸支し、これらを連結するボギーリンクと、ボギーリンクの前輪と中輪の間の中間部と、後輪と、を軸支し、これらを連結するロッカーリンクを備えることで、不整地を走行させることができる。特に段差を、例えばロッカーボギー車が現在位置している路面から、路面よりも高い段差面へと上るように走行する際には、まず、中輪及び後輪を路面に接地させつつ、ロッカーリンクがボギーリンクを軸支する回転軸を中心に、ロッカーリンクに対してボギーリンクを回転させるモータを、前輪が上昇する前輪上昇方向にボギーリンクが回転するように制御部が制御して、前輪を中輪及び後輪よりも上昇させて前輪を路面から離間させ、その状態で前進することで、前輪を段差の上の段差面に接地させる。続いて、前輪及び後輪をそれぞれ段差面と路面とに接地させつつ、前輪が下降する、前輪上昇方向とは反対の方向である前輪下降方向にボギーリンクが回転するように、制御部がモータを制御して、中輪を上昇させて路面から離間させ、その状態で更に前進させて、前輪に加えて中輪も段差面に接地させる。そして、前輪及び中輪を段差面に接地させつつ、前輪上昇方向にボギーリンクが回転するように、制御部がモータを制御して、後輪を上昇させて路面から離間させ、段差面に接地させる。これにより、ロッカーボギー車は、段差を上ることができる。同様な手順で段差を下ることも可能であり、このようにしてロッカーボギー車は、段差を踏破し、走行することができる。
ここで、上記のような構成においては、制御部は、段差を踏破する場合に、モータを制御してボギーリンクを回転させて前輪と後輪のいずれか一方の車輪を上昇または下降させて路面から離間させる際には、前後方向における車体部の荷重バランスを変動させ、上昇または下降させる一方の車輪とは前後方向において反対側における車体部の荷重を増大させる。このため、ロッカーボギー車が段差を上るに際し、一方の車輪として前輪を路面から離間させて段差面へと上昇させる場合には、制御部は、上昇させようとする前輪とは前後方向において反対側、すなわち後方における車体部の荷重を増大させるように、構成することができる。また、前輪と中輪が段差面へと上った後に、一方の車輪として後輪を路面から離間させて段差面へと上昇させる場合には、制御部は、上昇させようとする後輪とは前後方向において反対側、すなわち前方における車体部の荷重を増大させるように、構成することができる。ロッカーボギー車が段差を下るに際しても同様に、一方の車輪として前輪を路面から離間させて段差面へと下降させる場合には、制御部は、下降させようとする前輪とは前後方向において反対側、すなわち後方における車体部の荷重を増大させるように、構成することができる。また、前輪と中輪が路面から段差面へと下りた後に、一方の車輪として後輪を段差面へと下降させる場合には、制御部は、下降させようとする後輪とは前後方向において反対側、すなわち前方における車体部の荷重を増大させるように、構成することができる。
このように、ロッカーボギー車の車体部の荷重が、上昇または下降させようとする一方の車輪とは前後方向において反対側で増大すると、ロッカーボギー車の荷重は、中輪と、一方の車輪とは前後方向において反対側に位置する車輪と、によって主に支持されるため、上昇または下降させようとする一方の車輪に作用する荷重が低減する。このため、ロッカーリンクを回転させるためのモータのトルクを小さくすることができる。したがって、段差に立板が設けられておらず、立板と車輪との間の摩擦力を利用して車輪を上昇、下降させることができない場合であっても、段差を容易に踏破することができる。
また、段差を踏破するに際して、ロッカーボギー車の車体部の荷重が、路面から離間させようとする一方の車輪とは前後方向において反対側で増大するため、路面から離間させようとする一方の車輪の替わりに、反対側に位置する車輪が路面や段差面から離間してしまうことが、抑制される。更には、ロッカーボギー車の車体部の荷重が、上昇または下降させようとする一方の車輪とは前後方向において反対側で増大すると、一方の車輪に作用する荷重が低減するため、一方の車輪が上昇または下降して路面から離間したとしても、ロッカーボギー車が前後方向において、一方の車輪の方向へと転倒することが抑制される。したがって、段差を踏破する際の、ロッカーボギー車の安定性が向上する。
このようにして、立板が設けられていない段差を容易に、かつ安定して踏破することが可能となる。
【0009】
本発明の一態様においては、本発明のロッカーボギー車は、重心の位置を前後方向に移動させる重心移動機構を更に備え、前記制御部は、前記一方の車輪を上昇または下降させる際には、前記重心移動機構を制御して、前記重心の前記位置を、前記一方の車輪とは前記前後方向において反対側へと移動させることで、前記一方の車輪とは前記前後方向において反対側における前記車体部の荷重を増大させる。
上記のような構成によれば、ロッカーボギー車は、重心の位置を前後方向に移動させる重心移動機構を備えており、制御部は、段差を踏破する場合に、前輪と後輪のいずれか一方の車輪を上昇または下降させて路面から離間させる際には、重心移動機構を制御して、重心の位置を、上昇または下降させる一方の車輪とは前後方向において反対側へと移動させる。このため、ロッカーボギー車が段差を上るに際し、一方の車輪として前輪を路面から離間させて段差面へと上昇させる場合には、制御部は、重心移動機構を制御して、重心の位置を、上昇させようとする前輪とは前後方向において反対側、すなわち後方へと移動させるように、構成することができる。また、前輪と中輪が段差面へと上った後に、一方の車輪として後輪を路面から離間させて段差面へと上昇させる場合には、制御部は、重心移動機構を制御して、重心の位置を、上昇させようとする後輪とは前後方向において反対側、すなわち前方へと移動させるように、構成することができる。ロッカーボギー車が段差を下るに際しても同様に、一方の車輪として前輪を路面から離間させて段差面へと下降させる場合には、制御部は、重心移動機構を制御して、重心の位置を、下降させようとする前輪とは前後方向において反対側、すなわち後方へと移動させるように、構成することができる。また、前輪と中輪が路面から段差面へと下りた後に、一方の車輪として後輪を段差面へと下降させる場合には、制御部は、重心移動機構を制御して、重心の位置を、下降させようとする後輪とは前後方向において反対側、すなわち前方へと移動させるように、構成することができる。
このように、ロッカーボギー車の重心が、上昇または下降させようとする一方の車輪とは前後方向において反対側へと移動すると、ロッカーボギー車の荷重は、中輪と、一方の車輪とは前後方向において反対側に位置する車輪と、によって主に支持されるため、上昇または下降させようとする一方の車輪に作用する荷重が低減する。このため、ロッカーリンクを回転させるためのモータのトルクを小さくすることができる。したがって、段差に立板が設けられておらず、立板と車輪との間の摩擦力を利用して車輪を上昇、下降させることができない場合であっても、段差を容易に踏破することができる。
また、段差を踏破するに際して、ロッカーボギー車の重心が、路面から離間させようとする一方の車輪とは前後方向において反対側へと移動するため、路面から離間させようとする一方の車輪の替わりに、反対側に位置する車輪が路面や段差面から離間してしまうことが、抑制される。更には、ロッカーボギー車の重心が、上昇または下降させようとする一方の車輪とは前後方向において反対側へと移動すると、一方の車輪に作用する荷重が低減するため、一方の車輪が上昇または下降して路面から離間したとしても、ロッカーボギー車が前後方向において、一方の車輪の方向へと転倒することが抑制される。したがって、段差を踏破する際の、ロッカーボギー車の安定性が向上する。
【0010】
本発明の別の態様においては、前記重心移動機構は、前記前後方向に延びるように設けられたレール部と、前記レール部上を前記前後方向に移動自在に設けられた質量体と、前記質量体を前記レール部上で移動させる駆動部と、を備え、前記制御部は、前記駆動部を制御して、前記質量体を前記前後方向に移動させることで、前記重心の位置を前記前後方向に移動させる。
上記のような構成によれば、重心移動機構は、前後方向に延びるように設けられたレール部と、レール部上を前後方向に移動自在に設けられた質量体と、質量体をレール部上で移動させる駆動部と、を備えている。このような構成において、制御部が、駆動部を制御して、質量体を前方へと移動させることで、重心の位置を前方へと移動させることができる。また、制御部が、駆動部を制御して、質量体を後方へと移動させることで、重心の位置を後方へと移動させることができる。このようにして、重心の位置を前後方向に移動させる重心移動機構を、適切に実現することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
無人搬送車
17日前
株式会社明電舎
電力変換装置
17日前
株式会社明電舎
トランス構造、ゲート駆動回路
17日前
株式会社明電舎
車両冷却装置、車両冷却装置用ダクト
18日前
株式会社明電舎
監視装置、監視方法及び監視プログラム
25日前
個人
折り畳み自転車
4か月前
個人
発音装置
1か月前
個人
電動モビリティ
1か月前
個人
自転車用傘捕捉具
5か月前
個人
自転車用荷台
9か月前
個人
自由方向乗車自転車
1か月前
個人
体重掛けリフト台車
5か月前
個人
アタッチメント
6か月前
個人
キャンピングトライク
3か月前
個人
自転車用荷物台
5か月前
個人
ステアリングの操向部材
8か月前
株式会社CPM
駐輪機
6か月前
個人
ステアリングの操向部材
3か月前
三甲株式会社
台車
8か月前
株式会社三五
リアサブフレーム
4か月前
三甲株式会社
台車
8か月前
ダイハツ工業株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
豊田合成株式会社
操舵装置
6か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
コンビ株式会社
乳母車
18日前
株式会社カインズ
台車
2か月前
株式会社オカムラ
搬送用什器
2か月前
株式会社カインズ
台車
4か月前
株式会社クボタ
作業車
20日前
個人
自転車の駐輪場システム
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ