TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025034144
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023140337
出願日
2023-08-30
発明の名称
運転支援装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
G08G
1/16 20060101AFI20250306BHJP(信号)
要約
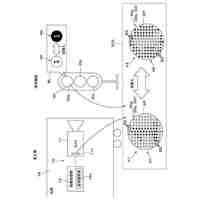
【課題】路肩駐車車両の誤検出を抑制し、さらに路肩駐車車両の検出精度を向上する。
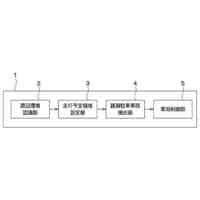
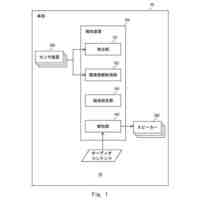
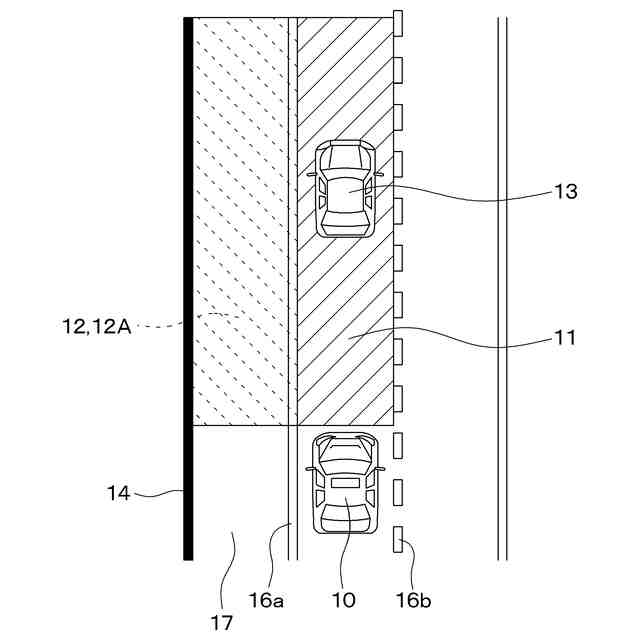
【解決手段】運転支援装置1が備える路肩駐車車両検出部4は、周辺環境認識部2が認識した道路の中に設定した検出エリア12内に認識される他車両13を路肩駐車車両として検出する。路肩駐車車両検出部4は、他車両13が路肩駐車車両である可能性が高いことを示す特徴を有しない場合、道路のうち走行予定領域11の外側の少なくとも一部のエリアを、通常時の検出エリア12として設定する。路肩駐車車両検出部4は、他車両13が路肩駐車車両である可能性が高いことを示す特徴を有する場合、通常時の検出エリア12を含みさらに通常時の検出エリア12から走行予定領域11に近づけたエリア、または、通常時の検出エリア12を含みさらに通常時の検出エリア12から走行予定領域11の一部に広げたエリアを、拡大時の検出エリア12として設定する。
【選択図】図1
特許請求の範囲
【請求項1】
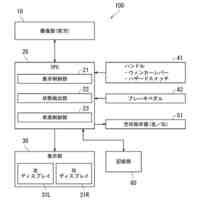
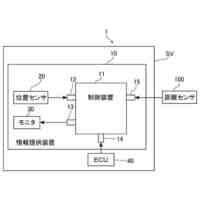
自車両(10)におけるドライバの運転を支援する運転支援装置において、
前記自車両の前方に存在する他車両(13)および道路を含む周辺環境を認識する周辺環境認識部(2)と、
前記周辺環境認識部が認識した前記道路の中に前記自車両の走行が予定される領域である走行予定領域(11)を設定する走行予定領域設定部(3)と、
前記周辺環境認識部が認識した前記道路の中に路肩駐車車両を検出するための検出エリア(12)を設定し、前記検出エリア内に認識される前記他車両を前記路肩駐車車両として検出する路肩駐車車両検出部(4)と、
前記路肩駐車車両に対する前記ドライバの運転を支援するように前記自車両を制御する車両制御部(5)と、を備え、
前記路肩駐車車両検出部は、
前記自車両の前方に存在する前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴を有するか否かを判定可能であり、
前記自車両の前方に存在する前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴を有しない場合、前記道路のうち前記走行予定領域の外側の少なくとも一部のエリアを通常時の前記検出エリア(12A)として設定し、
前記自車両の前方に存在する前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴を有する場合、前記通常時の前記検出エリアを含みさらに前記通常時の前記検出エリアから前記走行予定領域に近づけたエリア、または、前記通常時の前記検出エリアを含みさらに前記通常時の前記検出エリアから前記走行予定領域の一部に広げたエリアを拡大時の前記検出エリア(12B)として設定する、運転支援装置。
続きを表示(約 1,100 文字)
【請求項2】
前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴の1つは、道路端(14)と前記他車両との距離(D1)が、所定の距離閾値より近いことである、請求項1に記載の運転支援装置。
【請求項3】
前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴の1つは、前記他車両がハザードランプ(15)を点滅していることである、請求項1または2に記載の運転支援装置。
【請求項4】
前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴の1つは、路肩幅(W1)が所定の路肩幅閾値より狭く、且つ、前記他車両がハザードランプを点滅していることである、請求項1または2に記載の運転支援装置。
【請求項5】
前記走行予定領域は前記自車両が走行する車線であり、
前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴の1つは、前記自車両が走行する前記車線の幅(W2)が、所定の車線幅閾値より広く、且つ、前記自車両が走行する前記車線を規定する車線境界線(16a)のうち路肩側のものと前記他車両との距離(D2)が、所定の片寄閾値より近いことである、請求項1または2に記載の運転支援装置。
【請求項6】
前記他車両が前記路肩駐車車両である可能性が高いことを示す特徴の1つは、前記他車両を追い越す運転操作が前記ドライバよってされたことである、請求項1または2に記載の運転支援装置。
【請求項7】
所定の条件が成立した場合、前記路肩駐車車両検出部が前記検出エリア内に認識される前記他車両を前記路肩駐車車両として検出することを禁止する禁止部(6)をさらに備える、請求項1または2に記載の運転支援装置。
【請求項8】
前記所定の条件は、前記検出エリア内に認識される前記他車両の手前で前記自車両を停車させる運転操作が前記ドライバよってされたことである、請求項7に記載の運転支援装置。
【請求項9】
前記走行予定領域は前記自車両が走行する車線であり、
前記所定の条件は、前記検出エリアのうち前記走行予定領域の外側の領域が、前記自車両が走行する前記車線に隣接する隣接車線(18)であることである、請求項7に記載の運転支援装置。
【請求項10】
前記所定の条件は、前記検出エリア内に認識される前記他車両の車両前後方向の中心線(C1)と前記走行予定領域の中心線(C2)とのなす角度(θ)が所定の傾き閾値より大きいことである、請求項7に記載の運転支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ドライバの運転を支援する運転支援装置に関するものである。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1に記載の運転支援装置は、自車両の進路の前方に存在する路肩駐車車両などの遮蔽物の死角領域から歩行者などが飛び出して自車両と衝突するリスクを推定するものである。この運転支援装置は、自車両の進路の前方に死角領域を生じさせる遮蔽物が存在するか否かを、車載カメラで撮影された画像を解析して認識された物体のサイズ、位置、相対速度に基づいて判定する。具体的には、この運転支援装置は、物体のサイズが所定の寸法以上であり、物体の位置が自車両の走行予定領域から所定の距離以内にあり、且つ、相対速度が所定の速度以下の場合、その物体が遮蔽物であると判定する。そして、この運転支援装置は、その遮蔽物の死角領域からの飛び出しのリスクに応じた運転支援を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2022-144036号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の運転支援装置が用いる判定方法では、自車両の前方に存在する遮蔽物が他車両である場合、その他車両が、例えば渋滞または信号待ちなどで停車している最後尾の車両であるか、或いは、路肩駐車車両であるかを区別できない。自車両の進路前方に存在する他車両が路肩駐車車両であれば、運転支援装置は、その路肩駐車車両の死角領域からの飛び出しに注意しつつ自車両が路肩駐車車両を通過するように運転支援を実行する必要がある。一方、自車両の進路前方に存在する他車両が渋滞または信号待ちなどで停車している最後尾の車両であれば、運転支援装置は、その最後尾の車両の手前で自車両を停車させるなど、路肩駐車車両とは異なる運転支援を実行する必要がある。そのため、特許文献1に記載の運転支援装置は、例えば渋滞または信号待ちなどで停車している最後尾の車両と、路肩駐車車両との区別ができないので、状況に応じた運転支援を実行することが困難になる恐れがある。
【0005】
本開示は上記点に鑑みて、路肩駐車車両の誤検出を抑制し、さらに路肩駐車車両の検出精度を向上する運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
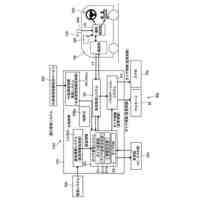
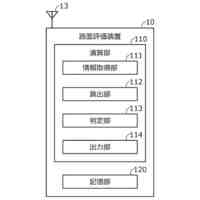
本開示の1つの観点によると、自車両(10)におけるドライバの運転を支援する運転支援装置は、
自車両の前方に存在する他車両(13)および道路を含む周辺環境を認識する周辺環境認識部(2)と、
周辺環境認識部が認識した道路の中に自車両の走行が予定される領域である走行予定領域(11)を設定する走行予定領域設定部(3)と、
周辺環境認識部が認識した道路の中に路肩駐車車両を検出するための検出エリア(12)を設定し、検出エリア内に認識される他車両を路肩駐車車両として検出する路肩駐車車両検出部(4)と、
路肩駐車車両に対するドライバの運転を支援するように自車両を制御する車両制御部(5)と、を備え、
路肩駐車車両検出部は、
自車両の前方に存在する他車両が路肩駐車車両である可能性が高いことを示す特徴を有するか否かを判定可能であり、
自車両の前方に存在する他車両が路肩駐車車両である可能性が高いことを示す特徴を有しない場合、道路のうち走行予定領域の外側の少なくとも一部のエリアを通常時の検出エリア(12A)として設定し、
自車両の前方に存在する他車両が路肩駐車車両である可能性が高いことを示す特徴を有する場合、通常時の検出エリアを含みさらに通常時の検出エリアから走行予定領域に近づけたエリア、または、通常時の検出エリアを含みさらに通常時の検出エリアから走行予定領域の一部に広げたエリアを拡大時の検出エリア(12B)として設定する。
【0007】
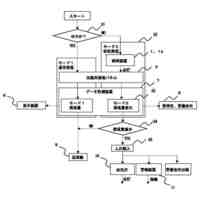
これによれば、路肩駐車車両検出部は、他車両が路肩駐車車両である可能性が高いことを示す特徴を有しない場合、通常時の検出エリア(以下、「通常検出エリア」という)を設定する。そのため、渋滞または信号待ちなどで停車している最後尾の車両に対し、路肩駐車車両であると誤検出することを防止できる。
一方、路肩駐車車両検出部は、他車両が路肩駐車車両である可能性が高いことを示す特徴を有する場合、拡大時の検出エリア(以下、「拡大検出エリア」という)を設定する。そのため、自車両の走行予定領域内で路肩駐車している他車両に対し、路肩駐車車両であると正しく検出できる。したがって、この運転支援装置は、路肩駐車車両の誤検出を抑制し、さらに路肩駐車車両の検出精度を向上できる。その結果、この運転支援装置は、路肩駐車車両に対する有効な運転支援を実行できる。
【0008】
なお、本開示において、路肩駐車車両とは、路肩に駐車または停車している車両に加え、自車両の走行予定領域内(例えば、車線内)で路肩近くに駐車または停車している車両を含んでいる。
【0009】
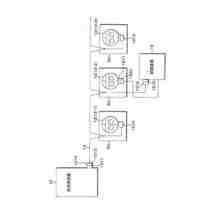
本開示の別の観点によると、自車両(10)におけるドライバの運転を支援する運転支援装置は、
自車両の前方に存在する他車両(13)および道路を含む周辺環境を認識する周辺環境認識部(2)と、
周辺環境認識部が認識した道路の中に交差点の存在を検出する交差点検出部(7)と、
周辺環境認識部が認識した道路の中に自車両の走行が予定される領域である走行予定領域(11)を設定する走行予定領域設定部(3)と、
周辺環境認識部が認識した道路の中に路肩駐車車両を検出するための検出エリア(12)を設定し、検出エリア内に認識される他車両を路肩駐車車両として検出する路肩駐車車両検出部(4)と、
路肩駐車車両に対するドライバの運転を支援するように自車両を制御する車両制御部(5)と、を備え、
路肩駐車車両検出部は、道路のうち走行予定領域の外側の少なくとも一部を含んで検出エリアを設定し、
走行予定領域設定部は、
交差点検出部が交差点を検出していない場合、ヨーレートを含む自車両の現在の走行状態情報を用いることなく車線境界線(16a、16b)を用いて自車両が走行する車線を走行予定領域として設定し、
交差点検出部が交差点を検出した場合、車線境界線を用いることなくヨーレートを含む自車両の現在の走行状態情報を用いて交差点内および交差点より前方の走行予定領域を設定する。
【0010】
これによれば、走行予定領域設定部は、交差点では、走行状態情報を用いて、交差点内および交差点より前方の走行予定領域を設定する。そのため、走行予定領域設定部は、交差点内で車線境界線(即ち、白線)が認識できなくても、走行予定領域を正しく設定できる。
一方、走行予定領域設定部は、交差点以外の道路では、走行状態情報を用いることなく車線境界線を用いて自車両が走行する車線を走行予定領域として設定する。そのため、走行予定領域設定部は、交差点以外の道路でドライバによる修正舵がされた場合でも、その影響を受けることなく、走行予定領域を正しく設定できる。
したがって、路肩駐車車両検出部は、歩行者の飛び出す可能性の高い交差点と、交差点以外の道路の両方において、正しい走行予定領域に基づき、検出エリアを正しく設定できるので、路肩駐車車両の誤検出を抑制し、さらに路肩駐車車両の検出精度を向上できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社SOKEN
駆動装置
今日
株式会社SOKEN
運転支援装置
今日
株式会社SOKEN
回転電機のステータ
今日
個人
自動運転車
2か月前
個人
黄色点滅式信号機
10日前
個人
空飛ぶ自動車の空路
6日前
個人
迷子支援システム
1か月前
個人
万引き防止システム
27日前
株式会社ニカデン
検出装置
1か月前
株式会社サンライン
発炎筒携行容器
2か月前
ABT合同会社
詐欺防止装置
27日前
ニッタン株式会社
発信機
1か月前
株式会社あおい興産
避難誘導灯
1か月前
株式会社国際電気
防災システム
1か月前
ニッタン株式会社
発信機
1か月前
日本信号株式会社
運行管理システム
20日前
ホーチキ株式会社
防災システム
27日前
京セラ株式会社
制御装置
1か月前
合同会社ORIC-LAB
太陽光発電管理装置
1日前
株式会社SUBARU
危険報知システム
27日前
シャープ株式会社
表示装置
2か月前
本田技研工業株式会社
路面評価装置
今日
株式会社豊田自動織機
運行表示装置
1か月前
本田技研工業株式会社
路面評価装置
今日
日本信号株式会社
信号システム及び信号灯器
1か月前
戸田建設株式会社
検知システム
2か月前
株式会社小糸製作所
情報提供装置及び制御装置
27日前
株式会社JR西日本テクシア
接触防止システム
1か月前
株式会社知財事業研究所
運行計画作成システム
今日
トヨタ自動車株式会社
情報提供システム
2か月前
株式会社JVCケンウッド
報知装置及び報知方法
1か月前
株式会社JVCケンウッド
報知装置及び報知方法
1か月前
トヨタ自動車株式会社
車両の情報処理装置
24日前
本田技研工業株式会社
制御装置
3か月前
シャープ株式会社
通信装置および通信方法
2か月前
株式会社京三製作所
交通信号制御システム
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ