TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025031106
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023137095
出願日
2023-08-25
発明の名称
操舵制御装置
出願人
株式会社ジェイテクト
,
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250228BHJP(鉄道以外の路面車両)
要約
【課題】操舵系が不安定化することを抑制できるようにした操舵制御装置を提供する。
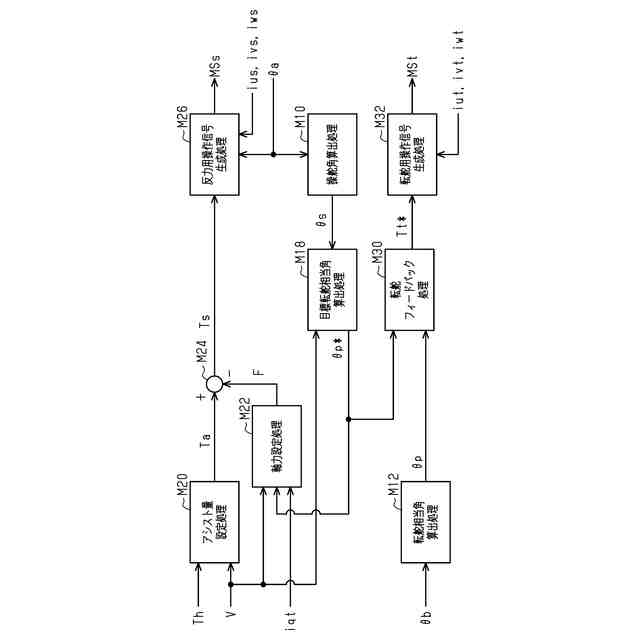
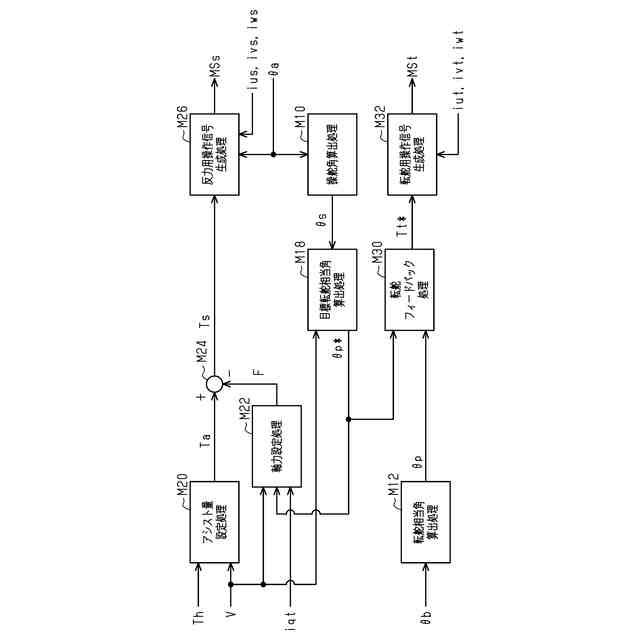
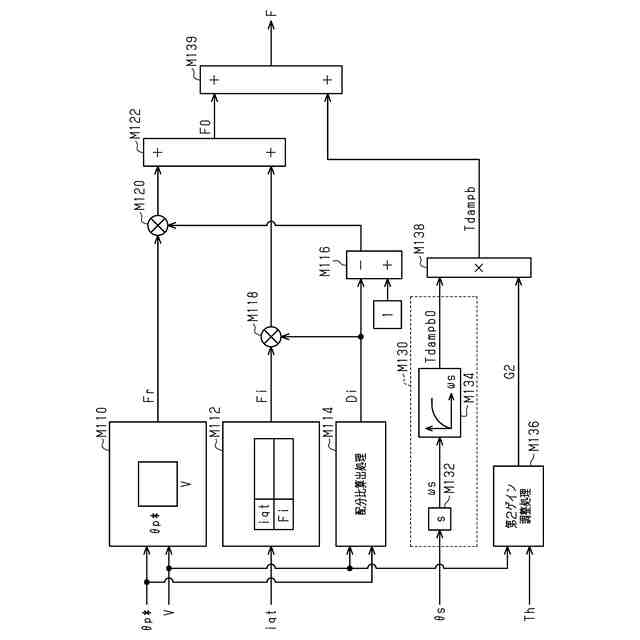
【解決手段】PUは、アシスト量Taから軸力Fを減算した値を目標反力トルクTsに代入する。PUは、反力モータのトルクを目標反力トルクTsに応じて制御する。PUは、アシスト量Taを、操舵角速度と負の相関を有する第1ダンピング補正量を用いて算出する。PUは、軸力Fを、操舵角速度と負の相関を有する第2ダンピング補正量を用いて算出する。
【選択図】図2
特許請求の範囲
【請求項1】
ステアリング軸に操舵反力を付与する反力モータと、前記ステアリング軸からの動力伝達が遮断された状態で転舵輪を転舵させる転舵モータとを備える操舵系を制御対象とし、
アシスト量設定処理、軸力設定処理、および反力付与処理を実行するように構成され、
前記アシスト量設定処理は、第1ダンピング処理の出力値を用いつつ運転者が前記ステアリング軸を回転させるのをアシストする量であるアシスト量を設定する処理であり、
前記軸力設定処理は、第2ダンピング処理の出力値を用いつつ運転者による前記ステアリング軸の回転操作に抗する力である軸力を設定する処理であり、
前記反力付与処理は、前記アシスト量から前記軸力を減算した値が入力であって且つ前記反力モータを操作する処理であり、
前記第1ダンピング処理は、操舵角速度と相関を有する第1ダンピング補正量を出力する処理であり、
前記第2ダンピング処理は、前記操舵角速度と正の相関を有する第2ダンピング補正量を出力する処理である操舵制御装置。
続きを表示(約 550 文字)
【請求項2】
トルク相関変数の値に応じて前記第2ダンピング処理のゲインである第2ゲインを調整する第2ゲイン調整処理を実行するように構成され、
前記トルク相関変数は、前記反力モータのトルクと相関を有する変数である請求項1記載の操舵制御装置。
【請求項3】
前記第2ゲイン調整処理は、前記トルク相関変数の値に加えて、車速に応じて前記第2ゲインを調整する処理である請求項2記載の操舵制御装置。
【請求項4】
前記アシスト量設定処理は、前記第1ダンピング処理を含む複数の補償処理の出力値を用いつつ前記アシスト量を設定する処理であり、
トルク相関変数の値に応じて複数の前記補償処理のうちの少なくとも1つのゲインである補償ゲインを調整する補償ゲイン調整処理を実行するように構成され、
前記トルク相関変数は、前記反力モータのトルクと相関を有する変数である請求項1記載の操舵制御装置。
【請求項5】
前記補償ゲイン調整処理は、前記トルク相関変数の値に加えて、車速に応じて前記補償ゲインを調整する処理である請求項4記載の操舵制御装置。
【請求項6】
前記トルク相関変数は、操舵トルクである請求項2記載の操舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操舵制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
たとえば下記特許文献1には、ステアバイワイヤシステムに搭載される操舵制御装置が記載されている。この制御装置は、運転者がステアリングホイールを操舵する方向の力である操舵力と、軸力とを設定する。そして同装置は、操舵力から軸力を減算した値に応じてステアリングホイールに反力を付与するモータのトルクを制御する。
【先行技術文献】
【特許文献】
【0003】
特開2022-160308号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記モータのトルクが大きくなる状況等において、ステアリングホイールが振動するなど、操舵系が不安定化する現象が発明者によって見出された。
【課題を解決するための手段】
【0005】
以下、上記課題を解決するための手段およびその作用効果について記載する。
1.ステアリング軸に操舵反力を付与する反力モータと、前記ステアリング軸からの動力伝達が遮断された状態で転舵輪を転舵させる転舵モータとを備える操舵系を制御対象とし、アシスト量設定処理、軸力設定処理、および反力付与処理を実行するように構成され、前記アシスト量設定処理は、第1ダンピング処理の出力値を用いつつ運転者が前記ステアリング軸を回転させるのをアシストする量であるアシスト量を設定する処理であり、前記軸力設定処理は、第2ダンピング処理の出力値を用いつつ運転者による前記ステアリング軸の回転操作に抗する力である軸力を設定する処理であり、前記反力付与処理は、前記アシスト量から前記軸力を減算した値が入力であって且つ前記反力モータを操作する処理であり、前記第1ダンピング処理は、操舵角速度と相関を有する第1ダンピング補正量を出力する処理であり、前記第2ダンピング処理は、前記操舵角速度と正の相関を有する第2ダンピング補正量を出力する処理である操舵制御装置。
【0006】
上記構成では、第2ダンピング処理を新設したために、第2ダンピング補正量を用いて、操舵系が不安定化することを抑制できる。
2.トルク相関変数の値に応じて前記第2ダンピング処理のゲインである第2ゲインを調整する第2ゲイン調整処理を実行するように構成され、前記トルク相関変数は、前記反力モータのトルクと相関を有する変数である上記1記載の操舵制御装置。
【0007】
トルク相関係数は、反力モータのトルクおよびステアリング軸に運転者が入力するトルクである操舵トルクと正の相関を有する。そして、操舵系が不安定化する状況は、反力モータのトルクの絶対値が大きい場合や操舵トルクの絶対値が過度に大きい場合等に生じやすい。そのため、上記構成では、トルク相関係数によって、操舵系が不安定化しやすい状況を把握することによって、状況に応じて第2ダンピング処理のゲインを調整できる。そのため、操舵系が不安定化することを抑制するうえで適切なゲインを設定できる。
【0008】
3.前記第2ゲイン調整処理は、前記トルク相関変数の値に加えて、車速に応じて前記第2ゲインを調整する処理である上記2記載の操舵制御装置。
上記構成では、車速に応じて第2ゲインが設定される。これにより、車速が参照されることなく第2ゲインが設定される場合と比較して、安定性の低下が懸念される状況に応じてより適切な第2ゲインを設定できる。
【0009】
4.前記アシスト量設定処理は、前記第1ダンピング処理を含む複数の補償処理の出力値を用いつつ前記アシスト量を設定する処理であり、トルク相関変数の値に応じて複数の前記補償処理のうちの少なくとも1つのゲインである補償ゲインを調整する補償ゲイン調整処理を実行するように構成され、前記トルク相関変数は、前記反力モータのトルクと相関を有する変数である上記1~3のいずれか1つに記載の操舵制御装置。
【0010】
トルク相関係数は、反力モータのトルクおよびステアリング軸に運転者が入力するトルクである操舵トルクと正の相関を有する。そして、操舵系が不安定化する状況は、反力モータのトルクの絶対値が大きい場合や操舵トルクの絶対値が過度に大きい場合等に生じやすい。そのため、上記構成では、トルク相関係数によって、操舵系が不安定化しやすい状況を把握することによって、状況に応じて補償処理のゲインを調整できる。そのため、安定性の低下が懸念される状況に応じて補償処理の出力を適切な値に調整できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
重量物移動台車
10か月前
個人
折り畳み自転車
3か月前
個人
電動モビリティ
7日前
個人
発音装置
3日前
個人
自転車用傘捕捉具
4か月前
個人
体重掛けリフト台車
3か月前
個人
車両用横転防止装置
12か月前
個人
自転車用荷台
7か月前
個人
自由方向乗車自転車
7日前
井関農機株式会社
作業機
12か月前
個人
自転車用荷物台
3か月前
個人
キャンピングトライク
1か月前
三甲株式会社
保護具
12か月前
個人
クリアレインシェード
11か月前
井関農機株式会社
作業車両
9か月前
個人
アタッチメント
4か月前
株式会社ホシプラ
台車
11か月前
株式会社CPM
駐輪機
4か月前
個人
ステアリングの操向部材
1か月前
株式会社クラベ
面状ユニット
9か月前
個人
ステアリングの操向部材
6か月前
個人
スライドレインプルーフ
9か月前
帝人株式会社
車両構造体
9か月前
三甲株式会社
台車
6か月前
三甲株式会社
台車
12か月前
株式会社三五
リアサブフレーム
3か月前
祖峰企画株式会社
平台車
8か月前
三甲株式会社
台車
6か月前
ヤマハ発動機株式会社
車両
4か月前
ダイハツ工業株式会社
車両
5か月前
豊田合成株式会社
操舵装置
4か月前
ヤマハ発動機株式会社
車両
12か月前
学校法人千葉工業大学
車両
2か月前
ヤマハ発動機株式会社
車両
4か月前
ヤマハ発動機株式会社
車両
4か月前
ヤマハ発動機株式会社
車両
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ