TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025851
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131029
出願日
2023-08-10
発明の名称
ロボット
出願人
マックス株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B62D
57/028 20060101AFI20250214BHJP(鉄道以外の路面車両)
要約
【課題】簡易な構成により旋回性能を向上させることの可能なロボットを提供する。
【解決手段】本開示の一態様は、ロボットであって、本体部と、本体部の第1方向の前方に設けられた、ロボットを第1方向に駆動する前方駆動部と、本体部の第1方向の後方に設けられた、ロボットを第1方向に駆動する後方駆動部と、を備え、前方駆動部及び後方駆動部は、第1方向に垂直な第2方向に沿って相対的に移動可能に構成されるロボットを提供する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットであって、
本体部と、
前記本体部の第1方向の前方に設けられた、前記ロボットを前記第1方向に駆動する前方駆動部と、
前記本体部の前記第1方向の後方に設けられた、前記ロボットを前記第1方向に駆動する後方駆動部と、を備え、
前記前方駆動部及び前記後方駆動部は、前記第1方向に垂直な第2方向に沿って相対的に移動可能に構成される、ロボット。
続きを表示(約 1,300 文字)
【請求項2】
前記前方駆動部及び前記後方駆動部は、前記前方駆動部及び/又は前記後方駆動部が前記ロボットを前記第1方向に駆動しているときに、前記第2方向に沿って相対的に移動可能に構成される、
請求項1に記載のロボット。
【請求項3】
前記前方駆動部及び前記後方駆動部は、
前記ロボットを前記第1方向に対する右側に操舵する制御信号に応じて、前記前方駆動部が前記後方駆動部に対して相対的に前記第1方向に対する左側へ移動し、
前記ロボットを前記第1方向に対する左側に操舵する制御信号に応じて、前記前方駆動部が前記後方駆動部に対して相対的に前記第1方向に対する右側へ移動する、
請求項2に記載のロボット。
【請求項4】
前記前方駆動部は、
前記第2方向に延在するように前記本体部に設けられた前方基部と、
前記前方基部の前記第1方向に対する右側に設けられた右側前方駆動部と、
前記前方基部の前記第1方向に対する左側に設けられた左側前方駆動部と、を含み、
前記右側前方駆動部と前記左側前方駆動部とは前記第2方向に沿って配置される、
請求項1に記載のロボット。
【請求項5】
前記右側前方駆動部によって前記ロボットを駆動する右側前方速度と、前記左側前方駆動部によって前記ロボットを駆動する左側前方速度とは、互いに異なる、
請求項4に記載のロボット。
【請求項6】
前記前方駆動部及び前記後方駆動部は、
前記右側前方速度と、前記左側前方速度との差分に応じて、
前記第2方向に移動可能に構成される、
請求項5に記載のロボット。
【請求項7】
前記後方駆動部は、
前記第2方向に延在するように前記本体部に設けられた後方基部と、
前記後方基部の前記第1方向に対する右側に設けられた右側後方駆動部と、
前記後方基部の前記第1方向に対する左側に設けられた左側後方駆動部と、を含み、
前記右側後方駆動部と前記左側後方駆動部とは前記第2方向に沿って配置される、
請求項1から6のいずれか一項に記載のロボット。
【請求項8】
前記右側後方駆動部によって前記ロボットを駆動する右側後方速度と、前記左側後方駆動部によって前記ロボットを駆動する左側後方速度とは、互いに異なる、
請求項7に記載のロボット。
【請求項9】
前記前方駆動部及び前記後方駆動部は、
前記右側後方速度と、前記左側後方速度との差分に応じて、
前記第2方向に移動可能に構成される、
請求項8に記載のロボット。
【請求項10】
所定の検出領域内にある対象物を検出する検出部、を更に備え、
前記前方駆動部及び前記後方駆動部は、前記検出部の検出結果に基づいて、前記第1方向に垂直な第2方向に沿って相対的に移動可能に構成される、
請求項1に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、ロボットに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
従来より、例えば、複数の鉄筋上を自律的に走行した上で、当該複数の鉄筋が交差する交差部をワイヤ等により結束する鉄筋結束作業を自動化する鉄筋結束ロボットが提案されている。例えば、特許文献1には、鉄筋工事に使用できる自走型の作業用ロボットが開示されている。特許文献1に開示される作業用ロボットにおいては、左右の車輪の接地面がV字状に形成されており、当該V字の谷部分に縦方向の鉄筋を接触させることにより、脱輪を防止しつつ当該縦方向の鉄筋に沿って鉄筋上を移動可能に構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2019―039174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された技術では、車輪の接地面をV字状に形成することから走行中は車輪がV字の谷部分において鉄筋に係合するため、例えば左右の鉄筋が平行でない場合などには走行が極めて困難になり得る。この点につき、車輪の接地面を平坦な形状等にすることにより、旋回等も可能に構成することが考えられる。しかしながら、左右の駆動機構に回転速度差を設けることのみによって旋回を実現しようとする場合、旋回性能の向上には限界がある。例えば、左右の駆動機構間の寸法を小さくすることによる旋回性能の向上などが考えられるが、鉄筋結束機などでは、重量の大きな結束機等を搭載する必要があり、装置全体の重量バランスが悪化する場合がある。
【0005】
本開示は、上記課題に鑑みてなされたものであり、簡易な構成により旋回性能を向上させることの可能なロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様は、ロボットであって、本体部と、本体部の第1方向の前方に設けられた、ロボットを第1方向に駆動する前方駆動部と、本体部の第1方向の後方に設けられた、ロボットを第1方向に駆動する後方駆動部と、を備え、前方駆動部及び後方駆動部は、第1方向に垂直な第2方向に沿って相対的に移動可能に構成されるロボットを提供する。
【発明の効果】
【0007】
本開示により、簡易な構成により旋回性能を向上させることの可能なロボットが提供される。
【図面の簡単な説明】
【0008】
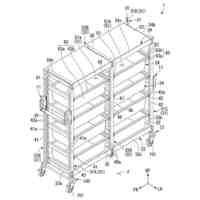
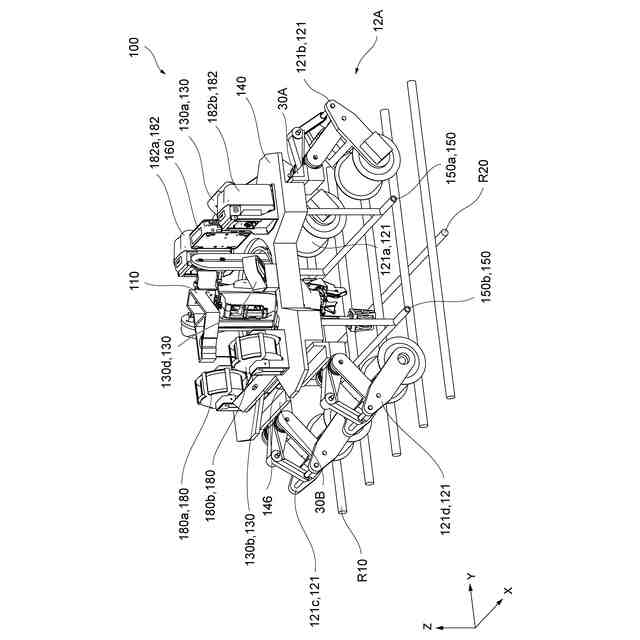
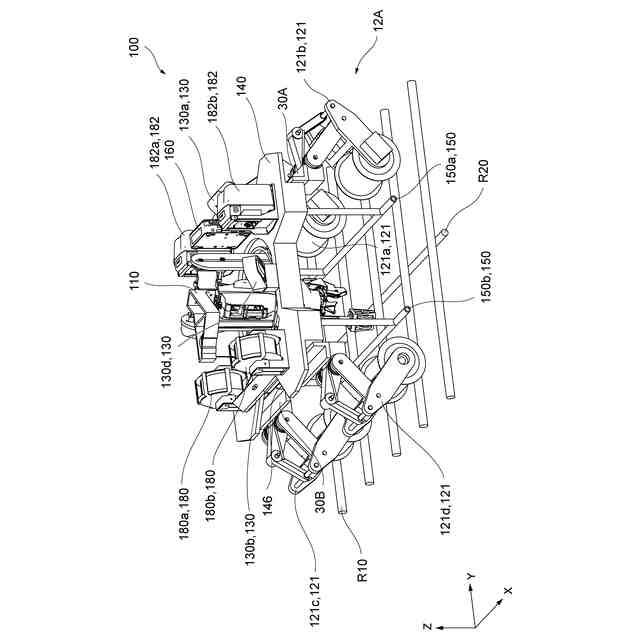
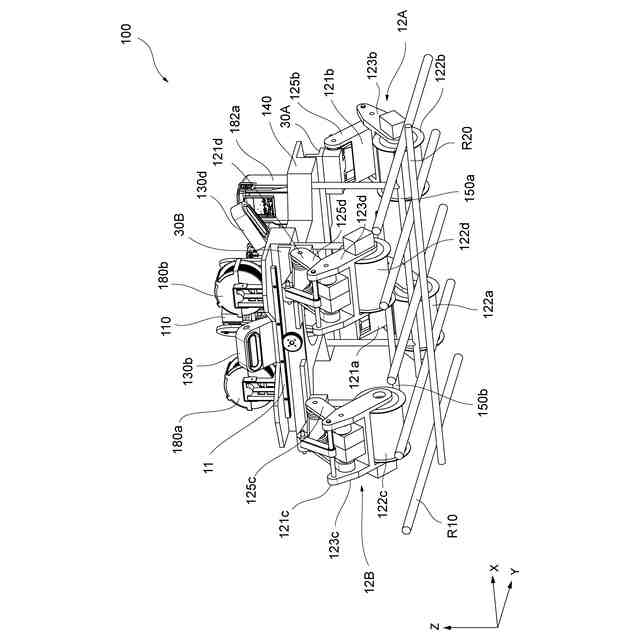
図1は、本開示の一実施例である鉄筋結束ロボット100の斜め上方向から見た全体斜視図である。
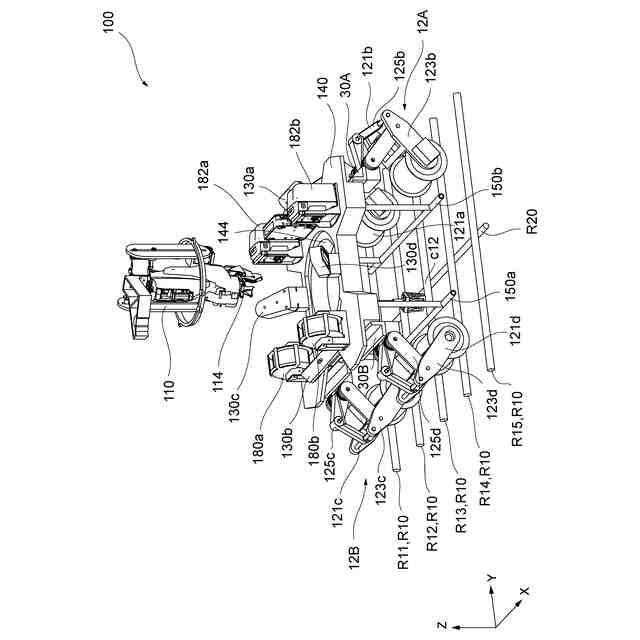
図2は、本開示の一実施例である鉄筋結束ロボットの斜め下方向から見た全体斜視図である。
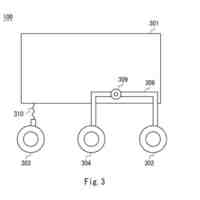
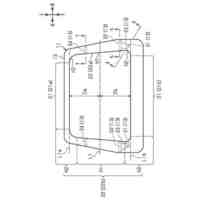
図3Aは、鉄筋結束ロボット100を上方向(Z方向における上方)から見た平面図である。
図3Aは、前方走行ユニット12Aが後方走行ユニット12Bに対して相対的に右側に移動した状態における鉄筋結束ロボット100を上方向(Z方向における上方)から見た平面図である。
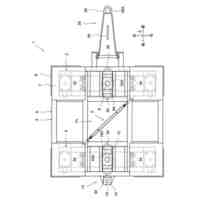
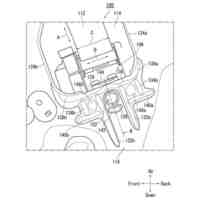
図4Aは、鉄筋結束ロボット100を下方向(Z方向における下方)から見た平面図である。
図4Aは、前方走行ユニット12Aが後方走行ユニット12Bに対して相対的に右側に移動した状態における鉄筋結束ロボット100を下方向(Z方向における下方)から見た平面図である。
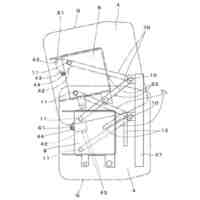
図5は、前方走行ユニット12Aの構成を説明するための図である。
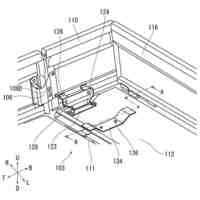
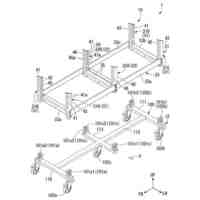
図6は、鉄筋結束ロボット100の鉄筋結束ユニット110を外した状態を斜め上方向から見た斜視図である。
図7は、鉄筋結束ロボット100の鉄筋結束ユニット110を外した状態を斜め下方向から見た斜視図である。
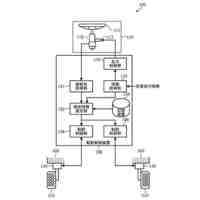
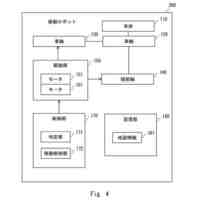
図8は、鉄筋結束ロボット100の機能ブロック構成を説明する図である。
図9は、第1鉄筋R10に沿って走行中の鉄筋結束ロボット100をY方向から見た図である。
図10は、第1鉄筋R10に沿って走行中の鉄筋結束ロボット100をX方向から見た図である。
図11は、走行を停止し結束作業を実行する鉄筋結束ロボット100をY方向から見た図である。
図12は、結束作業を実行する鉄筋結束ロボット100をX方向から見た図である。
図13は、結束作業を実行する鉄筋結束ロボット100をZ方向下側から見た図である。
図14Aは3D距離カメラにより撮影された第1鉄筋R10及び第2鉄筋R20の交差箇所付近の画像を示す。
図14Bは、第1鉄筋R10及び第2鉄筋R20の交差箇所付近の画像を模式的に示す。
図15Aは、鉄筋結束ロボット100を水平方向(X方向)から見た模式的な側面図である。
図15Bは、鉄筋結束ロボット100を上方向(Z方向上側)から見た模式的な上面図である。
図16は、第1センサ130aによる撮像画像を模式的に示す図である。
図17は、テンプレートマッチングを説明するための模式的な図である。
図18は、交差箇所の推定方法を説明するための、鉄筋結束ロボット100を模式的に示す図である。
図19は、本開示の実施形態における交差箇所c12の推定方法のフローチャートである。
図20は、鉄筋結束ロボット100の横移動に関するフローチャートである。
図21は、鉄筋結束ロボット100の第1鉄筋に沿った移動の方法のフローチャートである。
図22Aは、横移動中の鉄筋結束ロボット100を背面から見た図である。
図22Bは、横移動中の鉄筋結束ロボット100を斜め上方向から見た図である。
図23Aは、横移動中の鉄筋結束ロボット100を背面から見た図である。
図23Bは、横移動中の鉄筋結束ロボット100を斜め上方向から見た図である。
図24Aは、横移動中の鉄筋結束ロボット100を背面から見た図である。
図24Bは、横移動中の鉄筋結束ロボット100を斜め上方向から見た図である。
図25Aは、横移動中の鉄筋結束ロボット100を背面から見た図である。
図25Bは、横移動中の鉄筋結束ロボット100を斜め上方向から見た図である。
図26Aは、横移動中の鉄筋結束ロボット100を背面から見た図である。
図26Bは、横移動中の鉄筋結束ロボット100を斜め上方向から見た図である。
図27Aは、横移動中の鉄筋結束ロボット100を背面から見た図である。
図27Bは、横移動中の鉄筋結束ロボット100を斜め上方向から見た図である。
図28は、本開示の他の実施形態に係る鉄筋結束ロボット200のZ方向下方から見た模式的な図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら本実施形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
【0010】
以下、本開示の実施形態に係る結束装置100の構成について説明する。なお、本実施形態においては、結束装置は、互いに交差して配置された複数の鉄筋を結束する鉄筋結束装置であり、例えば、鉄筋結束ロボット(「ロボット」の一例)であってもよい。以下では、結束装置100として、鉄筋結束ロボットである場合を例に説明し、結束装置100は、鉄筋結束ロボット100とも称される。なお、各図面には、X軸、Y軸及びZ軸を示すことがある。X軸、Y軸及びZ軸は、右手系の3次元の直交座標を形成する。以下、X軸の矢印方向をX軸前方、+X方向、X方向の右側またはX軸右側、矢印とは逆方向をX軸後方、―X方向、X方向の左側またはX軸左側と呼ぶことがある。その他の軸についても同様である。なお、Z軸前方及びZ軸後方を、それぞれ「上側」乃至「上方」及び「下側」乃至「下方」と呼ぶこともある。また、X軸、Y軸又はZ軸にそれぞれ直交する面を、YZ面、ZX面又はXY面と呼ぶことがある。ただしこれら方向等は相対的位置関係を説明するために便宜的に用いられているものである。従ってこれら方向等は絶対的位置関係を規定するものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
折り畳み自転車
2か月前
個人
体重掛けリフト台車
3か月前
個人
自転車用荷物台
3か月前
個人
キャンピングトライク
1か月前
個人
ステアリングの操向部材
1か月前
株式会社三五
リアサブフレーム
2か月前
学校法人千葉工業大学
車両
2か月前
学校法人千葉工業大学
車両
2か月前
学校法人千葉工業大学
車両
2か月前
株式会社カインズ
台車
8日前
株式会社オカムラ
搬送用什器
4日前
株式会社カインズ
台車
2か月前
個人
車輪の付いたペダルを持つ自転車
1か月前
ダイハツ工業株式会社
車両構造
3か月前
株式会社ジェイテクト
操舵装置
2か月前
株式会社アテックス
自走式乗用草刈機
18日前
個人
自転車のチェーン駆動機構
20日前
日本精機株式会社
鞍型車両用表示装置
3か月前
株式会社ジェイテクト
操舵装置
5日前
日本物流機器株式会社
台車
1か月前
トヨタ自動車株式会社
六輪式車両
3か月前
スズキ株式会社
車両側部構造
19日前
スズキ株式会社
車両後部構造
3か月前
株式会社クボタ
作業車
1か月前
スズキ株式会社
車両後部構造
3か月前
スズキ株式会社
車両後部構造
3か月前
トヨタ自動車株式会社
移動システム
3か月前
朝日電装株式会社
グリップ加温装置
2か月前
株式会社クボタ
作業車
3か月前
株式会社SUBARU
車体前部構造
4日前
株式会社アイシン
ステアリング装置
1か月前
株式会社レップ
車輪付きバッグ
1か月前
イイダ産業株式会社
開口枠構造
1か月前
株式会社オカムラ
搬送用什器及び台車
4日前
マツダ株式会社
車両の下部構造
1か月前
株式会社ジオ設計
ペダル回転力強化装置
4日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ